3.1 Sensor 模块API手册
前言
概述
该模块在固件版本V0.6之后有较大改变,若使用V0.6之前固件请参考旧版本的文档
本文档主要介绍K230 CanMV平台Sensor模块 API使用说明及应用示例。
读者对象
本文档(本指南)主要适用于以下人员:
- 技术支持工程师
- 软件开发工程师
缩略词定义
| 简称 | 说明 |
|---|---|
修订记录
| 文档版本号 | 修改说明 | 修改者 | 日期 |
|---|---|---|---|
| V1.0 | 初版 | 赵忠祥 | 2024-04-24 |
| V2.0 | 重构API | xel | 2024-06-11 |
1. 概述
K230 CanMV平台sensor模块负责图像采集处理任务。本模块提供了一系列Highe Levl的API,应用开发者可以不用关注底层硬件细节,仅通过该模块提供的API即可获取不同格式和尺寸的图像。
K230 CanMV平台sensor模块包括三个独立的能力完全相同的sensor设备,每个sensor设备均可独立完成图像数据采集捕获处理,并可以同时输出3路图像数据。如下图所示:
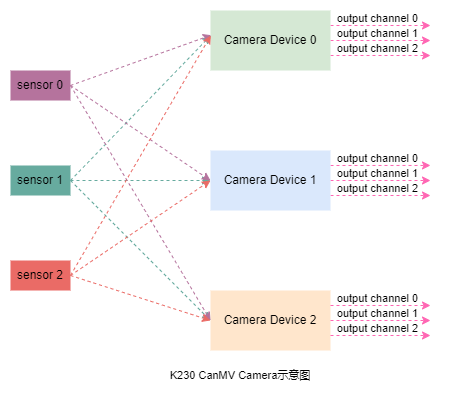
sensor 0,sensor 1,sensor 2表示三个图像传感器;Camera Device 0,Camera Device 1,Camera Device 2表示三个sensor设备;output channel 0,output channel 1,output channel 2表示sensor设备的三个输出通道。三个图像传感器可以通过软件配置映射到不同的sensor 设备。
2. API描述
构造函数
【描述】
根据csi id和摄像头类型构建Sensor对象
用户需要先构建Sensor对象再继续操作
目前已实现自动探测摄像头,用户可选择输出图像的最大分辨率和帧率,参考摄像头列表
用户设置目标分辨率和帧率之后,如果底层驱动不支持该设置,则会进行自动匹配出最佳配置
具体使用的配置可参考日志,如use sensor 23, output 640x480@90
【语法】
sensor = Sensor(id, [width, height, fps])
【参数】
| 参数名称 | 描述 | 输入/输出 | 说明 |
|---|---|---|---|
| id | csi 端口, 支持0-2 | 输入 | 必选 |
| width | sensor最大输出图像宽度 | 输入 | 可选,默认1920 |
| height | sensor最大输出图像高度 | 输入 | 可选,默认1080 |
| fps | sensor最大输出图像帧率 | 输入 | 可选,默认30 |
【返回值】
| 返回值 | 描述 |
|---|---|
| Sensor 对象 |
【举例】
sensor = Sensor(id = 0)
sensor = Sensor(id = 0, witdh = 1280, height = 720, fps = 60)
sensor = Sensor(id = 0, witdh = 640, height = 480)
【相关主题】
无
2.1 sensor.reset
【描述】
复位sensor
在构造Sensor对象之后,必须调用本函数才能继续其他操作
【语法】
sensor.reset()
【参数】
| 参数名称 | 描述 | 输入/输出 |
|---|---|---|
| 无 |
【返回值】
| 返回值 | 描述 |
|---|---|
| 无 |
【举例】
# 初始化sensor设备0以及sensor OV5647
sensor.reset()
【相关主题】
无
2.2 sensor.set_framesize
【描述】
设置指定通道的输出图像尺寸
用户可使用framesize或通过指定width&height来设置输出图像尺寸
宽度会自动对齐到16像素宽
【语法】
sensor.set_framesize(framesize = FRAME_SIZE_INVAILD, chn = CAM_CHN_ID_0, alignment=0, **kwargs)
【参数】
| 参数名称 | 描述 | 输入/输出 |
|---|---|---|
| framesize | sensor输出图像尺寸 | 输入 |
| chn | sensor输出通道号 | 输入 |
| width | 输出图像宽度,kw_arg | 输入 |
| height | 输出图像高度,kw_arg | 输入 |
【返回值】
| 返回值 | 描述 |
|---|---|
| 无 |
【注意】
输出图像尺寸不能超过摄像头实际输出。
不同输出通道最大可输出图像尺寸由硬件限制。
【举例】
# 配置sensor设备0,输出通道0, 输出图尺寸为640x480
sensor.set_framesize(chn = CAM_CHN_ID_0, width = 640, height = 480)
# 配置sensor设备0,输出通道1, 输出图尺寸为320x240
sensor.set_framesize(chn = CAM_CHN_ID_1, width = 320, height = 240)
【相关主题】
无
2.3 sensor.set_pixformat
【描述】
设置指定sensor设备和通道的输出图像格式
【语法】
sensor.set_pixformat(pix_format, chn = CAM_CHN_ID_0)
【参数】
| 参数名称 | 描述 | 输入/输出 |
|---|---|---|
| pix_format | 输出图像格式 | 输入 |
| chn_num | sensor输��出通道号 | 输入 |
【返回值】
| 返回值 | 描述 |
|---|---|
| 无 |
【举例】
# 配置sensor设备0,输出通道0, 输出NV12格式
sensor.set_pixformat(sensor.YUV420SP, chn = CAM_CHN_ID_0)
# 配置sensor设备0,输出通道1, 输出RGB888格式
sensor.set_pixformat(sensor.RGB888, chn = CAM_CHN_ID_1)
【相关主题】
无
2.4 sensor.set_hmirror
【描述】
设置摄像头水平镜像
【语法】
sensor.set_hmirror(enable)
【参数】
| 参数名称 | 描述 | 输入/输出 |
|---|---|---|
| enable | True 表示开启水平镜像 False表示关闭水平镜像 | 输入 |
【返回值】
| 返回值 | 描述 |
|---|---|
| 无 |
【注意】
【举例】
sensor.set_hmirror(True)
【相关主题】
无
2.5 sensor.set_vflip
【描述】
设置摄像头垂直翻转
【语法】
sensor.set_vflip(enable)
【参数】
| 参数名称 | 描述 | 输入/输出 |
|---|---|---|
| enable | True 表示开启垂直翻转 False 表示关闭垂直翻转 | 输入 |
【返回值】
| 返回值 | 描述 |
|---|---|
| 无 |
【注意】
【举例】
sensor.set_vflip(True)
【相关主题】
无
2.6 sensor.run
【描述】
摄像头开始输出
必须在MediaManager.init()之前调用
【语法】
sensor.run()
【参数】
【返回值】
| 返回值 | 描述 |
|---|---|
| 无 |
【注意】
如果同时使用多个摄像头(最多3个),只需要其中一个执行run即可
【举例】
# 启动sensor设备输出数据流
sensor.run()
【相关主题】
无
2.7 sensor.stop
【描述】
停止sensor输出
必须在MediaManager.deinit()之前调用
【语法】
sensor.stop()
【参数】
【返回值】
| 返回值 | 描述 |
|---|---|
| 无 |
【注意】
如果同时使用多个摄像头(最多3个),需要每一个都执行stop
【举例】
# 停止sensor设备0输出数据流
sensor.stop()
【相关主题】
无
2.8 sensor.snapshot
【描述】
从指定sensor设备的支持输出通道中捕获一帧图像数据
【语法】
sensor.snapshot(chn = CAM_CHN_ID_0)
【参数】
| 参数名称 | 描述 | 输入/输出 |
|---|---|---|
| chn_num | sensor输出通道号 |
【返回值】
| 返回值 | 描述 |
|---|---|
| image对象 | 成功 |
| 其他 | 失败 |
【注意】
【举例】
# 从sensor设备0的通道0输出捕获一帧图像数据
sensor.snapshot()
【相关主题】
无
2.9 sensor.bind_info
【描述】
在Display.bind_layer时使用,获取绑定信息
【语法】
sensor.bind_info(x = 0, y = 0, chn = CAM_CHN_ID_0)
【参数】
| 参数名称 | 描述 | 输入/输出 |
|---|---|---|
| x | 将sensor指定通道输出图像绑定到Display或Venc模块的指定坐标 | |
| y | 将sensor指定通道输出图像绑定到Display或Venc模块的指定坐标 | |
| chn_num | sensor输出通道号 |
【返回值】
| 返回值 | 描述 |
|---|---|
| 无 |
【注意】
【举例】
【相关主题】
无
3. 数据结构描述
3.1 frame_size
| 图像帧尺寸 | 分辨率 |
|---|---|
| QQCIF | 88x72 |
| QCIF | 176x144 |
| CIF | 352x288 |
| QSIF | 176x120 |
| SIF | 352x240 |
| QQVGA | 160x120 |
| QVGA | 320x240 |
| VGA | 640x480 |
| HQQVGA | 120x80 |
| HQVGA | 240x160 |
| HVGA | 480x320 |
| B64X64 | 64x64 |
| B128X64 | 128x64 |
| B128X128 | 128x128 |
| B160X160 | 160x160 |
| B320X320 | 320x320 |
| QQVGA2 | 128x160 |
| WVGA | 720x480 |
| WVGA2 | 752x480 |
| SVGA | 800x600 |
| XGA | 1024x768 |
| WXGA | 1280x768 |
| SXGA | 1280x1024 |
| SXGAM | 1280x960 |
| UXGA | 1600x1200 |
| HD | 1280x720 |
| FHD | 1920x1080 |
| QHD | 2560x1440 |
| QXGA | 2048x1536 |
| WQXGA | 2560x1600 |
| WQXGA2 | 2592x1944 |
3.2 pixel_format
| 像素格式 | |
|---|---|
| RGB565 | |
| RGB888 | |
| RGBP888 | |
| YUV420SP | NV12 |
| GRAYSCALE |
3.3 channel
| 通道号 | |
|---|---|
| CAM_CHN_ID_0 | 通道0 |
| CAM_CHN_ID_1 | 通道1 |
| CAM_CHN_ID_2 | 通道2 |
| CAM_CHN_ID_MAX | 非法通道 |
4. 摄像头列表
| 摄像头型号 | 分辨率 Width x Height | 帧率 |
|---|---|---|
| OV5647 | 1920x1080 | 30 |
| 1280x960 | 60 | |
| 1280x720 | 60 | |
| 640x480 | 90 |
5. 示例程序
例程
# Camera Example
import time, os, sys
from media.sensor import *
from media.display import *
from media.media import *
def camera_test():
print("camera_test")
# construct a Sensor object with default configure
sensor = Sensor()
# sensor reset
sensor.reset()
# set hmirror
# sensor.set_hmirror(False)
# sensor vflip
# sensor.set_vflip(False)
# set chn0 output size, 1920x1080
sensor.set_framesize(Sensor.FHD)
# set chn0 output format
sensor.set_pixformat(Sensor.YUV420SP)
# bind sensor chn0 to display layer video 1
bind_info = sensor.bind_info()
Display.bind_layer(**bind_info, layer = Display.LAYER_VIDEO1)
# set chn1 output format
sensor.set_framesize(width = 640, height = 480, chn = CAM_CHN_ID_1)
sensor.set_pixformat(Sensor.RGB888, chn = CAM_CHN_ID_1)
# set chn2 output format
sensor.set_framesize(width = 640, height = 480, chn = CAM_CHN_ID_2)
sensor.set_pixformat(Sensor.RGB565, chn = CAM_CHN_ID_2)
# use hdmi as display output
Display.init(Display.LT9611, to_ide = True, osd_num = 2)
# init media manager
MediaManager.init()
# sensor start run
sensor.run()
try:
while True:
os.exitpoint()
img = sensor.snapshot(chn = CAM_CHN_ID_1)
Display.show_image(img, alpha = 128)
img = sensor.snapshot(chn = CAM_CHN_ID_2)
Display.show_image(img, x = 1920 - 640, layer = Display.LAYER_OSD1)
except KeyboardInterrupt as e:
print("user stop: ", e)
except BaseException as e:
print(f"Exception {e}")
# sensor stop run
sensor.stop()
# deinit display
Display.deinit()
os.exitpoint(os.EXITPOINT_ENABLE_SLEEP)
time.sleep_ms(100)
# release media buffer
MediaManager.deinit()
if __name__ == "__main__":
os.exitpoint(os.EXITPOINT_ENABLE)
camera_test()