K230视频输出API参考
1. 概述
VO(Video Output,视频输出)模块主动从内存相应位置读取视频和图形数据,并通过相应的显示设备输出视频和图形。芯片支持的显示/回写设备、视频层和图形层情况。
LAYER层支持:
| LAYER0 | LAYER1 | LAYER2 | |
|---|---|---|---|
| 输入格式 | YUV420 NV12 | YUV420 NV12 | YUV420 NV12 YUV422 NV16 ? |
| 最大分辨率 | 1920x1080 | 1920x1080 | 1920x1080 |
| 叠加显示 | 支持可配置叠加顺序 | 支持可配置叠加顺序 | 支持可配置叠加顺序 |
| Rotation | √ | √ | - |
| Scaler | √ | - | - |
| Mirror | √ | √ | - |
| Gray | √ | √ | - |
| 独立开关 | √ | √ | √ |
OSD 层支持
| OSD0 | OSD1 | OSD2 | OSD3 | |
|---|---|---|---|---|
| 输入格式 | RGB888 RGB565 ARGB8888 Monochrome-8-bit RGB4444 RGB1555 | RGB888 RGB565 ARGB8888 Monochrome-8-bit RGB4444 RGB1555 | RGB888 RGB565 ARGB8888 Monochrome-8-bit RGB4444 RGB1555 | RGB888 RGB565 ARGB8888 Monochrome-8-bit RGB4444 RGB1555 |
| 最大分辨率 | 1920x1080 | 1920x1080 | 1920x1080 | 1920x1080 |
| 叠加显示 | 支持可配置叠加顺序 | 支持可配置叠加顺序 | 支持可配置叠加顺序 | 支持可配置叠加顺序 |
| ARGB 265 等级ALPHA | √ | √ | √ | √ |
| 独立开关 | √ | √ | √ | √ |
1.1 硬件描述
本次硬件介绍是以evblp3 做的介绍
1.1.1 Mipi接口
在evblp3 上的硬件引脚如下:
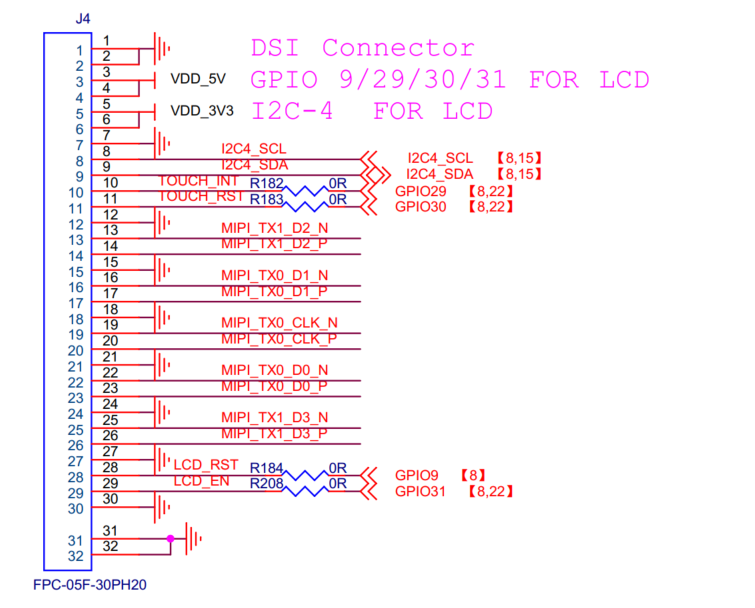
- 屏幕触摸iic用的iic4 (scl:gpio7,sda gpio8)
- 屏幕触摸 rst:gpio29, int:gpio30
- 屏幕的rst:gpio9,backlight:gpio31
- Mipi的引脚和屏幕的引脚一一对应
1.1.2 实物图
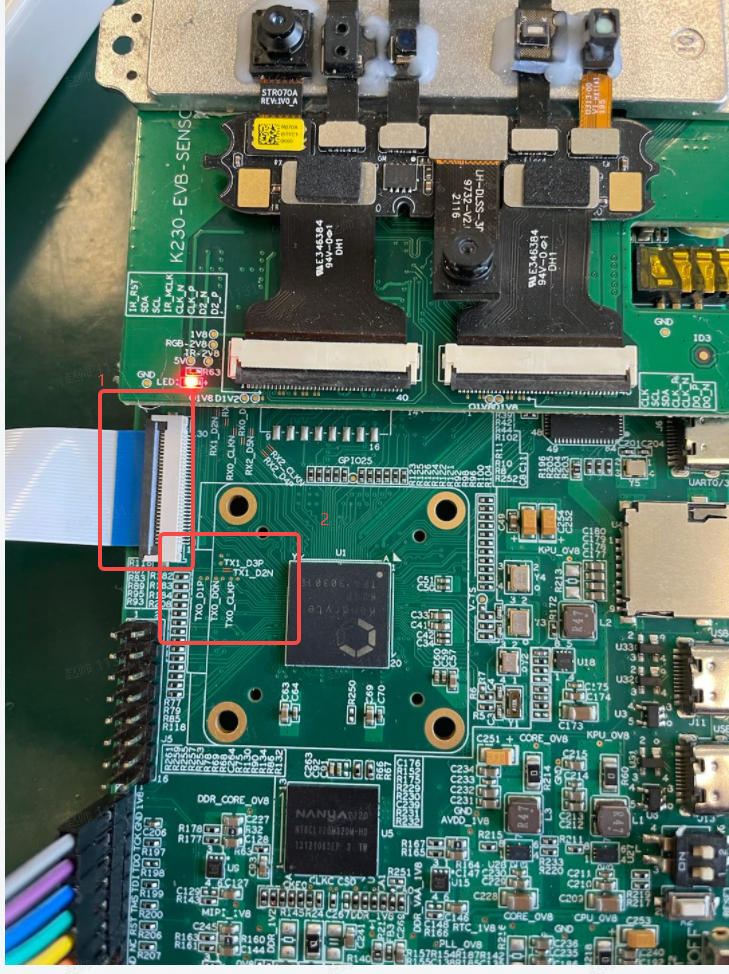
- 图中1为mipi接口,采用的是软排线
- 图中2为mipi信号测试点、包含四路data线和一路clk线
1.2 软件描述
视频输出软件配置分为3部分配置:phy 配置、dsi配置、VO配置,
1.2.1 PHY的配置流程
phy的频率需要配置三个参数、计算PLL、配置voc、配置freq,根据这三个参数就可以确定txphy的频率,每一个的参数计算如下。
1.2.1.1 计算phy的pll
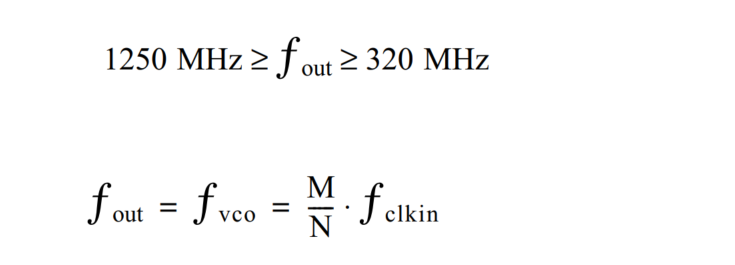
数据速率由 PLL 输出时钟相位频率的两倍给出:数据速率 (Gbps) = PLL Fout(GHz) * 2,输出频率是输入参考频率和倍频/分频比的函数。 计算phy 的pll共分为4种范围做的计算,不同的频率对应着不同的频率,它可以通过以下方式确定:
| M | m+2 |
|---|---|
| N | n+1 |
| Fclkin | 24M |
For:
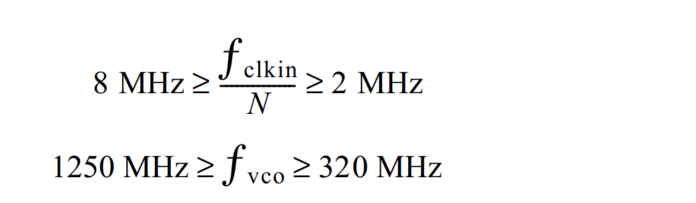
然而在这个需要遵循下边的限制:
For:
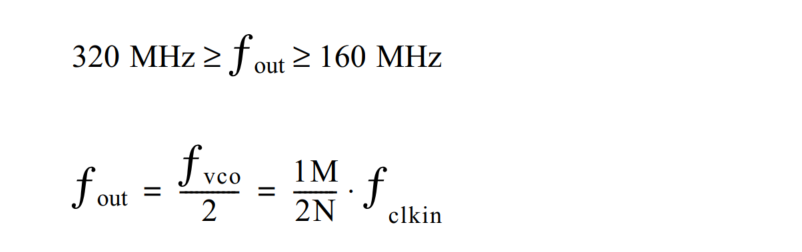
For:


For:
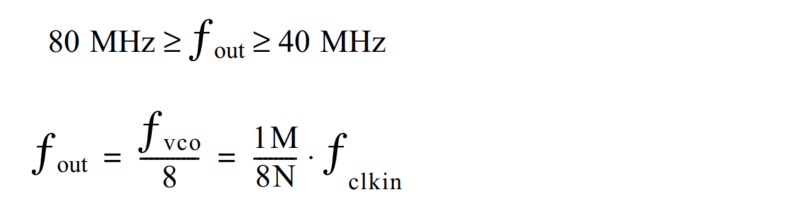
上边的每一个for 对应着一个pll的等级、不同的等级对应着不同的计算公式和限制,计算示例如下:
Example:
mipi 的速率为 445.5M:所以pll的速率就是222.75M,应该选择第二个公式,计算如下
222750000 = 1M / 2N = (m+2) / 2(n+1) * 24000000 , 整理完成公式如下:
222.75n + 198.75 = 12m ,通过excel 计算如下:
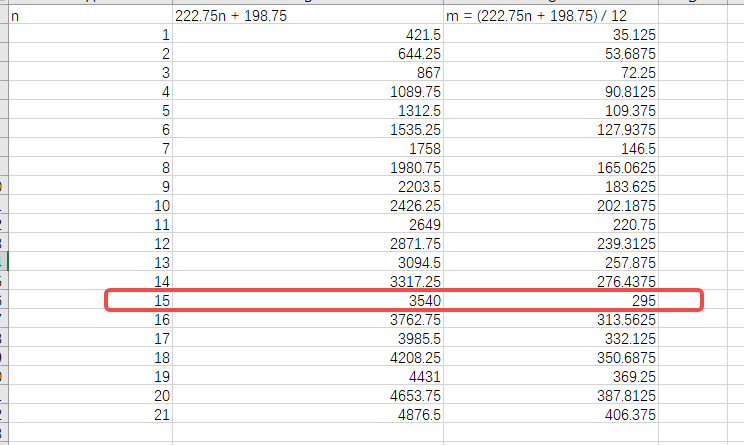
得出来的m = 295 ,n = 15。
配置pll中的m 和n都是整数值、如果所有的值都不是整数,就需要在m 和 n的值做加1和减1处理、反推回去看哪个频率理你需要的最近,再去验证是否可用,不可以就重复上边的操作。
1.2.1.2 配置phy的voc
配置phy 的voc 可以根据表格查询即可:
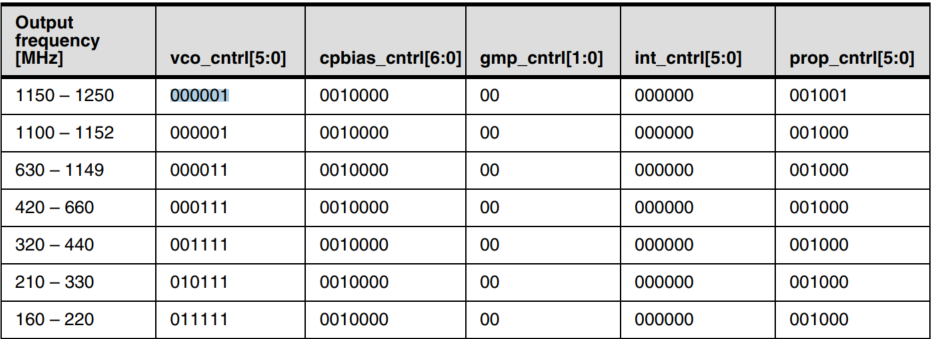
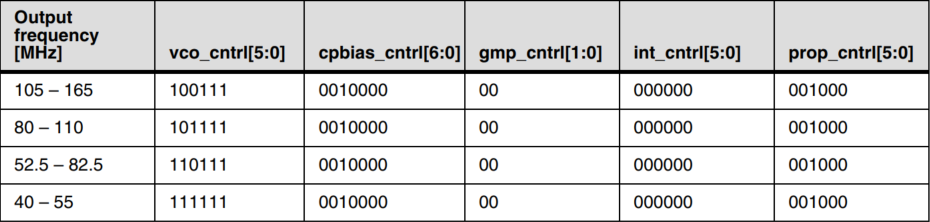
Example:
mipi 的速率为 445.5M:所以pll的速率就是222.75M,voc = 010111 = 0x17
1.2.1.3 配置freq
配置phy 的freq 可以根据表格查询即可:
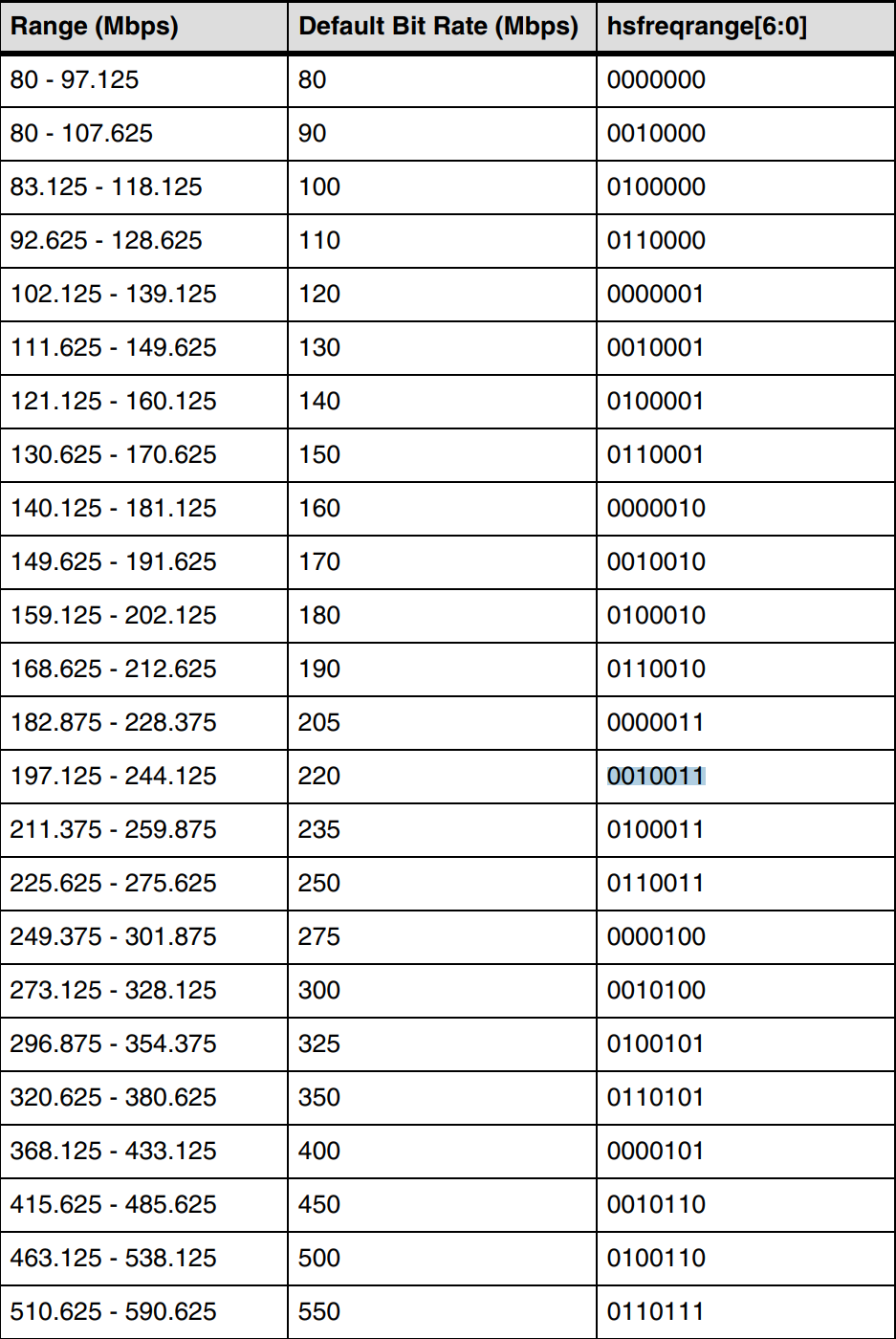
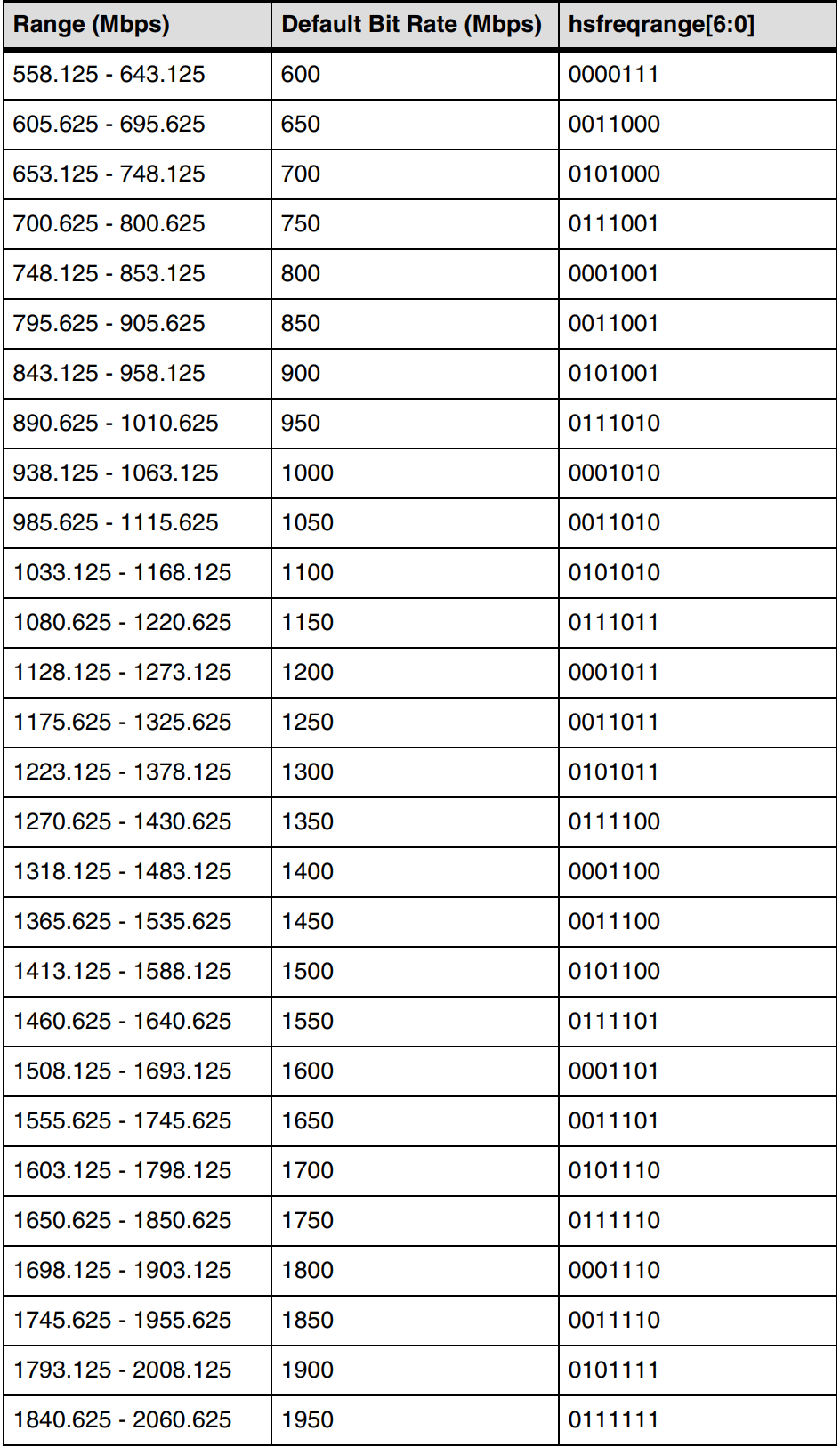
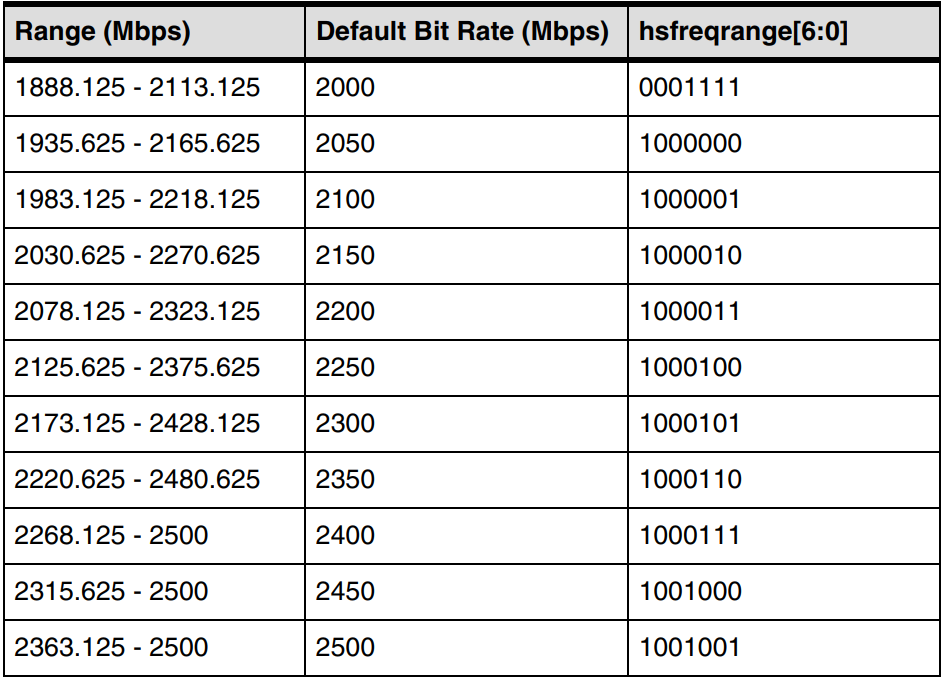
Example:
mipi 的速率为 445.5M:pll的速率就是222.75M,freq 选择0100101, 配置这个的时候需要将最高位bit[7] = 1,所有freq = 10100101= 0xa5
1.2.2 DSI的配置
DSI(Display Serial Interface)是MIPI 定义的一组通信协议的一部分联盟,主要实现 MIPI DSI 规范中定义的所有协议功能的数字控制器,包含了具有两个和四个通道的双向 PHY。
DSI在软件中主要配置屏幕显示用的timing和发送命令的功能。
1.2.2.1 配置显示器的timing
每个厂家的屏幕都会有一组时序用来做屏幕的控制,主要包含了帧的控制时序和一行的控制时序,如下图所示:
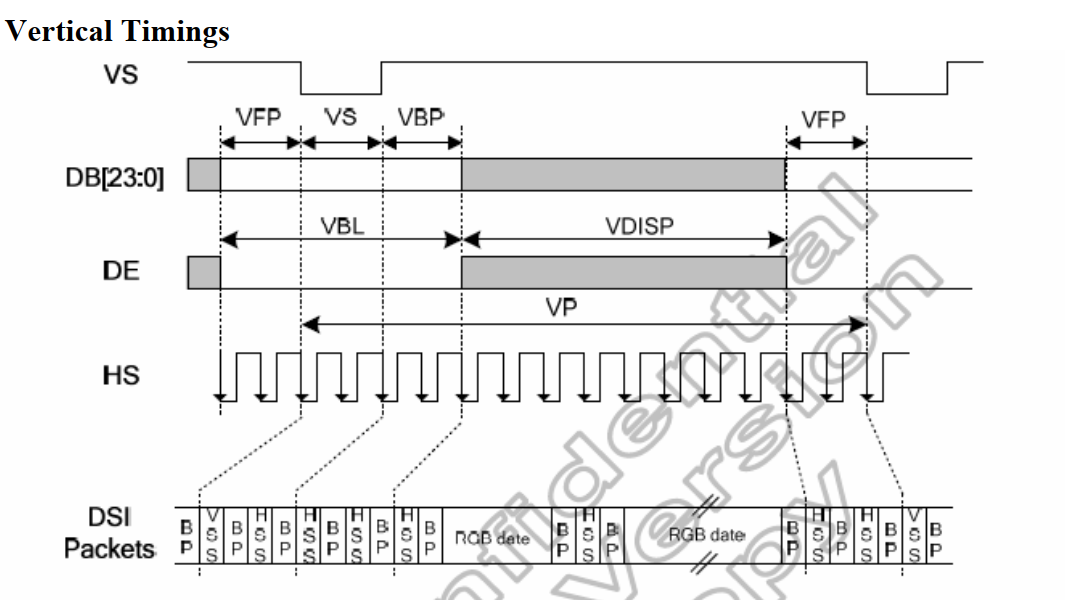
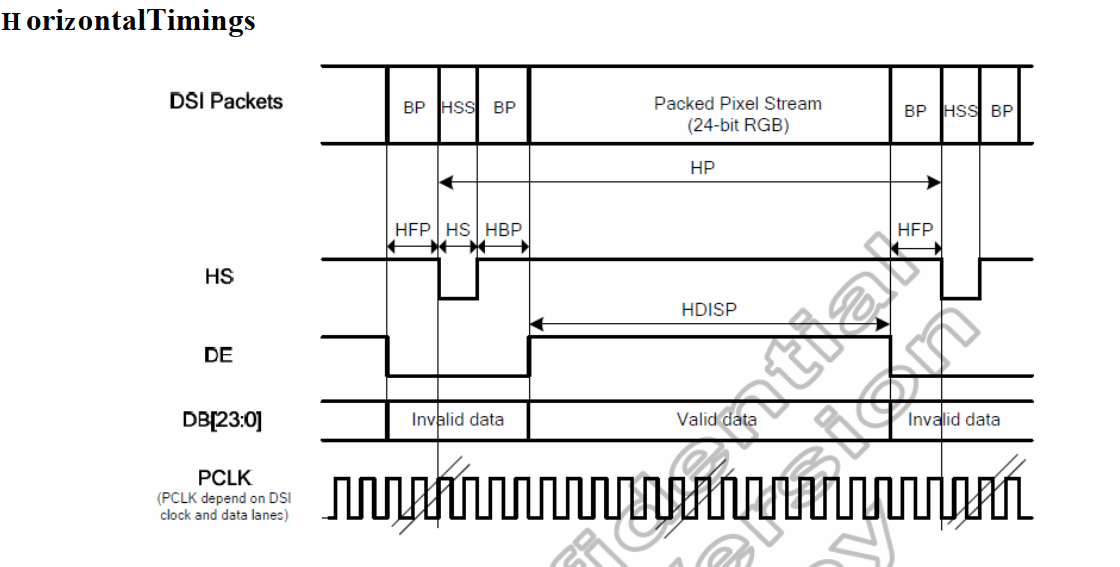
DSI中也会用到这些参数、配置的时序和屏幕一致即可。
1.2.2.2 DSI的命令下发
需要dsi 先进入lp模式、然后就可以发送命令,需要的api如下:
发送的数据是按照8位发送的,会根据数量自动选择发送长包还是短包。
1.2.2.3 DSI 的自测模式
DSI 自测模式会按照自己配置的dsi timing 产生color bar 的数据发送出去,这样不依赖vo从ddr读取数据,测试模式显示如下图:
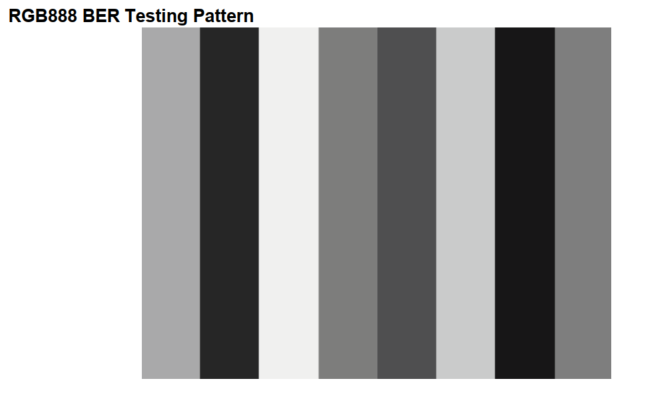
DSI 和vo之间采用的是24位接口,所以配置出�来的color bar 是上图的效果,使用方法只需要配置完成dsi之后使能color bar即可,api如下
1.2.3 VO的配置
VO(video output)主要是VO(Video Output,视频输出)模块主动从内存相应位置读取视频和图形数据,并通过相应的显示设备输出视频和图形,VO这部分包含两个配置、一个是timing 的配置、另一个是视频层的配置
1.2.3.1 VO 时序配置
VO的时序配置和dsi 的时序配置采用的一样的配置参数,具体的行和列一样,看dsi timing 介绍即可
V1.2.3.2 O的layer层配置
VO layer 层目前支持3个layer层、4个osd层。Layer层只能显示yuv的图像格式(layer0 和 layer1 支持的功能在概述中的图表)。
1.2.3.3 VO 的回写功能配置
VO 还支持回写功能、这个可以验证VO配置的是否正确,VO配置完成之后会将数据写回到ddr 当中,方便验证VO的配置是否出现异常
1.2.4 VO模块的调试方法
1.2.4.1 屏幕的测试方法
- 可以通过LP命令配置屏幕进入自测模式、看产生的图像是否正常
- 通过LP命令读取屏幕寄存器看是否有返回
1.2.4.2 DSI 的测试方法
- 配置完dsi之后,让屏幕进入自测模式,量取信号看时候正常,也可以看屏幕是否产生color bar 的图像
- 查看phy的err 状态寄存器、看是否有err 状态,可以通过proc查看
1.2.4.3 VO的测试方法
- VO配置完成之后、打开writeback 功能,查看是否和配置的要求一致
- 读取DSI的err状态寄存器,查看VO和dsi之间数据传输是否出现underflow和overflow,如果出现、适当的调整timing再次尝试
2. API 参考
2.1 TXPHY
该功能模块提供以下API:
2.1.1 kd_mpi_set_mipi_phy_attr
【描述】
设置phy 的频率
【语法】
k_s32 kd_mpi_set_mipi_phy_attr(k_vo_mipi_phy_attr *attr)
【参数】
| 参数名称 | 描述 | 输入/输出 |
|---|---|---|
| attr | Phy 的频率结构描述 | 输入 |
【返回值】
| 返回值 | 描述 |
|---|---|
| 0 | 成功。 |
| 非0 | 失败,参见错误码。 |
【芯片差异】
无
【需求】
- 头文件: mpi_vo_api.h k_vo_comm.h
- 库文件:libvo.a
【注意】
无
【举例】
无
【相关主题】
无
2.2 DSI
该功能模块提供以下API:
- kd_mpi_dsi_set_attr
- kd_mpi_dsi_enable
- kd_mpi_dsi_send_cmd
- kd_mpi_dsi_read_pkg
- kd_mpi_dsi_set_test_pattern
- kd_mpi_dsi_set_lp_mode_send_cmd
2.2.1 kd_mpi_dsi_set_attr
【描述】
配置dsi 属性参数
【语法】
k_s32 kd_mpi_dsi_set_attr(k_display_mode *attr)【参数】
| 参数名称 | 描述 | 输入/输出 |
|---|---|---|
| attr | dsi 属性参数 | 输入 |
【返回值】
| 返回值 | 描述 |
|---|---|
| 0 | 成功。 |
| 非0 | 失败,参见错误码。 |
【芯片差异】
无
【需求】
- 头文件: mpi_vo_api.h k_vo_comm.h
- 库文件:libvo.a
【注意】
无
【举例】
无
【相关主题】
无
2.2.2 kd_mpi_dsi_enable
【描述】
打开dsi
【语法】
k_s32 kd_mpi_dsi_enable(void)
【参数】
无
【返回值】
| 返回值 | 描述 |
|---|---|
| 0 | 成功。 |
| 非0 | 失败,参见错误码。 |
【芯片差异】
无
【需求】
- 头文件: mpi_vo_api.h
- 库文件:libvo.a
【注意】
无
【举例】
无
【相关主题】
无
2.2.3 kd_mpi_dsi_send_cmd
【描述】
Dsi 发送命令
【语法】
k_s32 kd_mpi_dsi_send_cmd(k_u8 *data, k_s32 cmd_len)
【参数】
| 参数名称 | 描述 | 输入/输出 |
|---|---|---|
| data | 发送的数据 | 输入 |
| cmd_len | 数据长度 | 输入 |
【返回值】
| 返回值 | 描述 |
|---|---|
| 0 | 成功。 |
| 非0 | 失败,参见错误码。 |
【芯片差异】
无
【需求】
- 头文件: mpi_vo_api.h
- 库文件:libvo.a
【注意】
无
【举例】
无
【相关主题】
无
2.2.4 kd_mpi_dsi_read_pkg
【描述】
Dsi 读取命令
【语法】
k_s32 kd_mpi_dsi_read_pkg(k_u8 *rx_buf, k_s32 cmd_len)
【参数】
| 参数名称 | 描述 | 输入/输出 |
|---|---|---|
| rx_buf, | 接受的数据 | 输入 |
| cmd_len | 数据长度 | 输入 |
【返回值】
| 返回值 | 描述 |
|---|---|
| 0 | 成功。 |
| 非0 | 失败,参见错误码。 |
【芯片差异】
无
【需求】
- 头文件: mpi_vo_api.h
- 库文件:libvo.a
【注意】
无
【举例】
无
【相关主题】
无
2.2.5 kd_mpi_dsi_set_test_pattern
【描述】
配置dsi 进入自测模式
【语法】
k_s32 kd_mpi_dsi_set_test_pattern(void)
【参数】、
无
【返回值】
| 返回值 | 描述 |
|---|---|
| 0 | 成功。 |
| 非0 | 失败,参见错误码。 |
【芯片差异】
无
【需求】
- 头文件: mpi_vo_api.h
- 库文件:libvo.a
【注意】
无
【举例】
无
【相关主题】
无
2.2.6 kd_mpi_dsi_set_lp_mode_send_cmd
【描述】
配置dsi 进入lp mode 发送命令
【语法】
k_s32 kd_mpi_dsi_set_lp_mode_send_cmd(void)
【参数】
无
【返回值】
| 返回值 | 描述 |
|---|---|
| 0 | 成功。 |
| 非0 | 失败,参见错误码。 |
【芯片差异】
无
【需求】
- 头文件: mpi_vo_api.h
- 库文件:libvo.a
【注意】
无
【举例】
无
【相关主题】
无
2.3 VO
- kd_mpi_vo_init
- kd_mpi_vo_set_dev_param
- kd_mpi_vo_enable_video_layer
- kd_mpi_vo_disable_video_layer
- kd_mpi_vo_enable
- kd_mpi_vo_chn_insert_frame
- kd_mpi_vo_chn_dump_frame
- kd_mpi_vo_chn_dump_release
- kd_mpi_vo_osd_enable
- kd_mpi_vo_osd_disable
- kd_mpi_vo_set_video_osd_attr
- kd_mpi_vo_set_wbc_attr
- kd_mpi_vo_enable_wbc
- kd_mpi_vo_disable_wbc
- kd_display_reset
- kd_display_set_backlight
- kd_mpi_vo_set_user_sync_info
- kd_mpi_vo_draw_frame
2.3.1 kd_mpi_vo_init
【描述】
Vo 初始化默认参数
【语法】
k_s32 kd_mpi_vo_init(void);
【参数】
无
【返回值】
| 返回值 | 描述 |
|---|---|
| 0 | 成功。 |
| 非0 | 失败,参见错误码。 |
【芯片差异】
无
【需求】
- 头文件: mpi_vo_api.h
- 库文件:libvo.a
【注意】
无
【举例】
无
【相关主题】
无
2.3.2 kd_mpi_vo_set_dev_param
【描述】
Dsi 发送命令
【语法】
k_s32 kd_mpi_vo_set_dev_param(k_vo_pub_attr *attr)
【参数】
| 参数名称 | 描述 | 输入/输出 |
|---|---|---|
| attr | 视频输出设备公共属性结构体指针。 | 输入 |
【返回值】
| 返回值 | 描述 |
|---|---|
| 0 | 成功。 |
| 非0 | 失败,参见错误码。 |
【芯片差异】
无
【需求】
- 头文件: mpi_vo_api.h k_vo_comm.h
- 库文件:libvo.a
【注意】
无
【举例】
无
【相关主题】
无
2.3.3 kd_mpi_vo_enable_video_layer
【描述】
配置layer 层属性参数
【语法】
k_s32 kd_mpi_vo_enable_video_layer(k_vo_layer layer)
【参数】
| 参数名称 | 描述 | 输入/输出 |
|---|---|---|
| layer | 视频输出视频层号 取值范围 【0 – K_MAX_VO_LAYER_NUM】 | 输入 |
| attr | 视频层属性结构体指针 | 输入 |
【返回值】
| 返回值 | 描述 |
|---|---|
| 0 | 成功。 |
| 非0 | 失败,参见错误码。 |
【芯片差异】
无
【需求】
- 头文件: mpi_vo_api.h
- 库文件:libvo.a
【注意】
无
【举例】
无
【相关主题】
无
2.3.4 kd_mpi_vo_disable_video_layer
【描述】
关闭视频层
【语法】
k_s32 kd_mpi_vo_disable_video_layer(k_vo_layer layer)
【参数】
| 参数名称 | 描述 | 输入/输出 |
|---|---|---|
| layer | 视频输出视频层号 取值范围 【0 – K_MAX_VO_LAYER_NUM】 | 输入 |
【返回值】
| 返回值 | 描述 |
|---|---|
| 0 | 成功。 |
| 非0 | 失败,参见错误码。 |
【芯片差异】
无
【需求】
- 头文件:
- 库文件:
【注意】
无
【举例】
无
【相关主题】
无
2.3.5 kd_mpi_vo_enable
【描述】
打开vo
【语法】
k_u8 kd_mpi_vo_enable(void);
【参数】
无
【返回值】
| 返回值 | 描述 |
|---|---|
| 0 | 成功。 |
| 非0 | 失败,参见错误码。 |
【芯片差异】
无
【需求】
- 头文件:
- 库文件:
【注意】
无
【举例】
无
【相关主题】
无
2.3.6 kd_mpi_vo_chn_insert_frame
【描述】
插入帧到vo的通道
【语法】
k_s32 kd_mpi_vo_chn_insert_frame(k_u32 chn_num, k_video_frame_info *vf_info)
【参数】
| 参数名称 | 描述 | 输入/输出 |
|---|---|---|
| chn_num | 通道数量 | 输入 |
| vf_info | 视频帧的结构体指针。 | 输入 |
【返回值】
| 返回值 | 描述 |
|---|---|
| 0 | 成功。 |
| 非0 | 失败,参见错误码。 |
【芯片差异】
无
【需求】
- 头文件: mpi_vo_api.h k_video_comm.h
- 库文件:libvo.a
【注意】
无
【举例】
无
【相关主题】
无
2.3.7 kd_mpi_vo_chn_dump_frame
【描述】
从vo 的通道中抓取一帧数据
【语法】
k_s32 kd_mpi_vo_chn_dump_frame(k_u32 chn_num, k_video_frame_info *vf_info, k_u32 timeout_ms);
【参数】
| 参数名称 | 描述 | 输入/输出 |
|---|---|---|
| chn_num | 通道id | 输入 |
| vf_info | 视频帧的结构体指针 | 输入 |
| timeout_ms | 超时时间 | 输入 |
【返回值】
| 返回值 | 描述 |
|---|---|
| 0 | 成功。 |
| 非0 | 失败,参见错误码。 |
【芯片差异】
无
【需求】
- 头文件: mpi_vo_api.h k_video_comm.h
- 库文件:libvo.a
【注意】
无
【举例】
无
【相关主题】
无
2.3.8 kd_mpi_vo_chn_dump_release
【描述】
释放抓取帧
【语法】
k_s32 kd_mpi_vo_chn_dump_release(k_u32 chn_num, const k_video_frame_info *vf_info);
【参数】
| 参数名称 | 描述 | 输入/输出 |
|---|---|---|
| chn_num | 通道id | 输入 |
| vf_info | 视频帧的结构体指针 | 输入 |
【返回值】
| 返回值 | 描述 |
|---|---|
| 0 | 成功。 |
| 非0 | 失败,参见错误码。 |
【芯片差异】
无
【需求】
- 头文件: mpi_vo_api.h k_video_comm.h
- 库文件:libvo.a
【注意】
无
【举例】
无
【相关主题】
无
2.3.9 kd_mpi_vo_osd_enable
【描述】
打开osd层
【语法】
k_s32 kd_mpi_vo_osd_enable(k_vo_osd layer)
【参数】
| 参数名称 | 描述 | 输入/输出 |
|---|---|---|
| layer | 视频输出视频层号 取值范围 【0 – K_MAX_VO_OSD_NUM】 | 输入 |
【返回值】
| 返回值 | 描述 |
|---|---|
| 0 | 成功。 |
| 非0 | 失败,参见错误码。 |
【芯片差异】
无
【需求】
- 头文件:mpi_vo_api.h k_vo_comm.h
- 库文件:libvo.a
【注意】
无
【举例】
无
【相关主题】
无
2.3.10 kd_mpi_vo_osd_disable
【描述】
关闭osd层
【语法】
k_s32 kd_mpi_vo_osd_disable(k_vo_osd layer)
【参数】
| 参数名称 | 描述 | 输入/输出 |
|---|---|---|
| layer | 视频输出视频层号 取值范围 【0 – K_MAX_VO_OSD_NUM】 | 输入 |
【返回值】
| 返回值 | 描述 |
|---|---|
| 0 | 成功。 |
| 非0 | 失败,参见错误码。 |
【芯片差异】
无
【需求】
- 头文件:mpi_vo_api.h k_vo_comm.h
- 库文件:libvo.a
【注意】
无
【举例】
无
【相关主题】
无
2.3.11 kd_mpi_vo_set_video_osd_attr
【描述】
设置osd层属性
【语法】
k_s32 kd_mpi_vo_set_video_osd_attr(k_vo_osd layer, k_vo_video_osd_attr *attr)
【参数】
| 参数名称 | 描述 | 输入/输出 |
|---|---|---|
| layer | 视频输出视频层号 取值范围 【0 – K_MAX_VO_OSD_NUM】 | 输入 |
| osd 层属性参数 | osd 层属性参数 | 输入 |
【返回值】
| 返回值 | 描述 |
|---|---|
| 0 | 成功。 |
| 非0 | 失败,参见错误码。 |
【芯片差异】
无
【需求】
- 头文件:mpi_vo_api.h k_vo_comm.h
- 库文件:libvo.a
【注意】
无
【举例】
无
【相关主题】
无
2.3.12 kd_mpi_vo_set_wbc_attr
【描述】
设置回写属性
【语法】
k_s32 kd_mpi_vo_set_wbc_attr(k_vo_wbc_attr *attr)
【参数】
| 参数名称 | 描述 | 输入/输出 |
|---|---|---|
| attr | writeback 属性参数 | 输入 |
【返回值】
| 返回值 | 描述 |
|---|---|
| 0 | 成功。 |
| 非0 | 失败,参见错误码。 |
【芯片差异】
无
【需求】
- 头文件:mpi_vo_api.h k_vo_comm.h
- 库文件:libvo.a
【注意】
无
【举例】
无
【相关主题】
无
2.3.13 kd_mpi_vo_enable_wbc
【描述】
使能writeback
【语法】
k_s32 kd_mpi_vo_enable_wbc(void)
【参数】
无
【返回值】
| 返回值 | 描述 |
|---|---|
| 0 | 成功。 |
| 非0 | 失败,参见错误码。 |
【芯片差异】
无
【需求】
- 头文件:mpi_vo_api.h k_vo_comm.h
- 库文件:libvo.a
【注意】
无
【举例】
无
【相关主题】
无
2.3.14 kd_mpi_vo_disable_wbc
【描述】
关闭writeback
【语法】
k_s32 kd_mpi_vo_disable_wbc(void)
【参数】
无
【返回值】
| 返回值 | 描述 |
|---|---|
| 0 | 成功。 |
| 非0 | 失败,参见错误码。 |
【芯片差异】
无
【需求】
- 头文件:mpi_vo_api.h k_vo_comm.h
- 库文件:libvo.a
【注意】
无
【举例】
无
【相关主题】
无
2.3.15 kd_display_reset
【描述】
复位视频输出子系统
【语法】
k_s32 kd_display_reset(void)
【参数】
无
【返回值】
| 返回值 | 描述 |
|---|---|
| 0 | 成功。 |
| 非0 | 失败,参见错误码。 |
【芯片差异】
无
【需求】
- 头文件:mpi_vo_api.h k_vo_comm.h
- 库文件:libvo.a
【注意】
无
【举例】
无
【相关主题】
无
2.3.16 kd_display_set_backlight
【描述】
复位屏幕和打开背光
【语法】
k_s32 kd_display_set_backlight(void)
【参数】
无
【返回值】
| 返回值 | 描述 |
|---|---|
| 0 | 成功。 |
| 非0 | 失败,参见错误码。 |
【芯片差异】
无
【需求】
- 头文件:mpi_vo_api.h k_vo_comm.h
- 库文件:libvo.a
【注意】
无
【举例】
无
【相关主题】
无
2.3.17 kd_mpi_vo_set_user_sync_info
【描述】
设置用户接口时序信息,用于配置时钟源、时钟大小和时钟分频比
【语法】
k_s32 kd_mpi_vo_set_user_sync_info(k_vo_user_sync_info *sync_info)
【参数】
| 参数名称 | 描述 | 输入/输出 |
|---|---|---|
| pre_div | 用户分频数 | 输入 |
| clk_en | 分频enable 使能 |
【返回值】
| 返回值 | 描述 |
|---|---|
| 0 | 成功。 |
| 非0 | 失败,参见错误码。 |
【芯片差异】
无
【需求】
- 头文件:mpi_vo_api.h k_vo_comm.h
- 库文件:libvo.a
【注意】
无
【举例】
无
【相关主题】
无
2.3.18 kd_mpi_vo_draw_frame
【描述】
画框
【语法】
k_s32 kd_mpi_vo_draw_frame(k_vo_draw_frame *frame)
【参数】
| 参数名称 | 描述 | 输入/输出 |
|---|---|---|
| frame | 画框的属性参数 | 输入 |
【返回值】
| 返回值 | 描述 |
|---|---|
| 0 | 成功。 |
| 非0 | 失败,参见错误码。 |
【芯片差异】
无
【需求】
- 头文件:mpi_vo_api.h k_vo_comm.h
- 库文件:libvo.a
【注意】
无
【举例】
��无
【相关主题】
无
2.3.19 kd_mpi_get_connector_info
【描述】
获取connecor 连接器的数据结构通过连接类型
【语法】
k_s32 kd_mpi_get_connector_info(k_connector_type connector_type, k_connector_info *connector_info)
【参数】
| 参数名称 | 描述 | 输入/输出 |
|---|---|---|
| connector_type | 连接器的类型 | 输入 |
| connector_info | 连接器的数据结构 | 输入 |
【返回值】
| 返回值 | 描述 |
|---|---|
| 0 | 成功。 |
| 非0 | 失败,参见错误码。 |
【芯片差异】
无
【需求】
- 头文件:mpi_vo_api.h k_vo_comm.h k_connector_comm.h
- 库文件:libvo.a libconnector.a
【注意】
无
【举例】
无
【相关主题】
无
2.3.20 kd_mpi_connector_open
【描述】
获取connecor 连接器的数据结构通过连接类型
【语法】
k_s32 kd_mpi_connector_open(const char *connector_name)
【参数】
| 参数名称 | 描述 | 输入/输出 |
|---|---|---|
| connector_name | 连接器的设备节点 | 输入 |
【返回值】
| 返回值 | 描述 |
|---|---|
| fd | 成功返回打开fd 的id |
| 小于0 | 失败,参见错误码。 |
【芯片差异】
无
【需求】
- 头文件:mpi_vo_api.h k_vo_comm.h k_connector_comm.h
- 库文件:libvo.a libconnector.a
【注意】
无
【举例】
无
【相关主题】
无
2.3.21 kd_mpi_connector_power_set
【描述】
打开connector 的电源
【语法】
k_s32 kd_mpi_connector_power_set(k_s32 fd, k_bool on)
【参数】
| 参数名称 | 描述 | 输入/输出 |
|---|---|---|
| fd | 连接器的设备节点 | 输入 |
| on | 连接器设备的开关 | 输入 |
【返回值】
| 返回值 | 描述 |
|---|---|
| 0 | 成功。 |
| 非0 | 失败,参见错误码。 |
【芯片差异】
无
【需求】
- 头文件:mpi_vo_api.h k_vo_comm.h k_connector_comm.h
- 库文件:libvo.a libconnector.a
【注意】
无
【举例】
无
【相关主题】
无
2.3.22 kd_mpi_connector_init
【描述】
vo connector 初始�化
【语法】
k_s32 kd_mpi_connector_init(k_s32 fd, k_connector_info info)
【参数】
| 参数名称 | 描述 | 输入/输出 |
|---|---|---|
| fd | 连接器的设备节点 | 输入 |
| info | 连接器初始化的参数 | 输入 |
【返回值】
| 返回值 | 描述 |
|---|---|
| 0 | 成功。 |
| 非0 | 失败,参见错误码。 |
【芯片差异】
无
【需求】
- 头文件:mpi_vo_api.h k_vo_comm.h k_connector_comm.h
- 库文件:libvo.a libconnector.a
【注意】
无
【举例】
无
【相关主题】
无
2.3.23 kd_mpi_connector_get_negotiated_data
【描述】
Display驱动和显示器自动协商分辨率,协商成功后会将协商后的数据保存到negotiated_data变量
【语法】
k_s32 kd_mpi_connector_get_negotiated_data(k_s32 fd, k_connector_negotiated_data *negotiated_data);
【参数】
| 参数名称 | 描述 | 输入/输出 |
|---|---|---|
| fd | 文件描述符 | 输入 |
| negotiated_data | Display驱动和HDMI显示器协商后的数据 | 输入 |
【返回值】
| 返回值 | 描述 |
|---|---|
| >= 1 | 成功,自适应成功后Display驱动支持的分辨率数量 |
| -1 | 失败,参见错误码 |
【芯片差异】
无
【需求】
- 头文件:mpi_vo_api.h k_vo_comm.h k_connector_comm.h
- 库文件:libvo.a libconnector.a
【注意】
kd_mpi_connector_get_negotiated_data()仅仅只会和显示器进行协商,协商成功后不会将最佳分辨率设置到VO、DSI、HDMI模块上
【举例】
无
【相关主题】
无
2.3.24 kd_mpi_connector_adapt_resolution
【描述】
Display驱动和显示器自动协商分辨率,协商成功后会将协商后的数据保存到negotiated_data变量,同时会将最佳的分辨率设置到VO、DSI、HDMI模块
【语法】
k_s32 kd_mpi_connector_adapt_resolution(k_connector_type type, k_connector_negotiated_data *negotiated_data)
【参数】
| 参数名称 | 描述 | 输入/输出 |
|---|---|---|
| type | 连接器的设备节点,HDMI接口通常设置为LT9611_MIPI_ADAPT_RESOLUTION | 输入 |
| negotiated_data | Display驱动和HDMI显示器协商后的数据 | 输入 |
【返回值】
| 返回值 | 描述 |
|---|---|
| 0 | 成功 |
| -1 | 失败,参见错误码 |
【芯片差异】
无
【需求】
- 头文件:mpi_vo_api.h k_vo_comm.h k_connector_comm.h
- 库文件:libvo.a libconnector.a
【注意】
1 kd_mpi_connector_adapt_resolution()内部通�过调用kd_mpi_connector_get_negotiated_data()和显示器进行协商
2 当应用程序调用kd_mpi_connector_adapt_resolution()函数完成自适应设置后,仍然可以调用 kd_mpi_get_connector_info()、kd_mpi_connector_open()、kd_mpi_connector_power_set()、kd_mpi_connector_init()重新设置输出分辨率
【举例】
无
【相关主题】
无
2.3.25 kd_mpi_connector_set_mirror
【描述】
设置屏幕mirror 功能
【语法】
k_s32 kd_mpi_connector_set_mirror(k_s32 fd, k_connector_mirror mirror)
【参数】
| 参数名称 | 描述 | 输入/输出 |
|---|---|---|
| fd | 文件描述符 | 输入 |
| mirror | 屏幕mirror 的功能 | 输入 |
【返回值】
| 返回值 | 描述 |
|---|---|
| 0 | 成功 |
| -1 | 失败,参见错误码 |
【芯片差异】
无
【需求】
- 头文件:mpi_vo_api.h k_vo_comm.h k_connector_comm.h
- 库文件:libvo.a libconnector.a
【注意】
1 kd_mpi_connector_adapt_resolution()内部通过调用kd_mpi_connector_get_negotiated_data()和显示器进行协商
2 当应用程序调用kd_mpi_connector_adapt_resolution()函数完成自适应设置后,仍然可以调用 kd_mpi_get_connector_info()、kd_mpi_connector_open()、kd_mpi_connector_power_set()、kd_mpi_connector_init()重新设置输出分辨率
【举例】
无
【相关主题】
无
3. 数据��类型
3.1 VO
3.1.1 k_vo_intf_sync
【说明】
定义视频中的分辨率和帧率
【定义】
typedef enum {
K_VO_OUT_1080P30,
K_VO_OUT_1080P60,
}k_vo_intf_sync;
【成员】
| 成员名称 | 描述 |
|---|---|
| K_VO_OUT_1080P30 | 1080 是表示1920x1080 个pix。30 表示 30fps |
| K_VO_OUT_1080P60 | 1080 是表示1920x1080 个pix。60 表示 60fps |
| K_VO_OUT_1080x1920P30 | 1080x1920 是表示1080x1920 个pix。30 表示 30fps |
| K_VO_OUT_11080x1920P60 | 1080x1920 是表示1080x1920 个pix。60 表示 60fps |
【注意事项】
无
【相关数据类型及接口】
3.1.2 k_vo_intf_type
【说明】
定义视频中的分辨率和帧率
【定义】
typedef enum {
 K_VO_INTF_MIPI = 0,
}k_vo_intf_type;
【成员】
| 成员名称 | 描述 |
|---|---|
| K_VO_INTF_MIPI | Mipi 接口 |
【注意事项】
无
【相关数据类型及接口】
3.1.3 k_pixel_format
【说明】
显示中layer 支持的数据格式,下边结构体中只列举了显示支持的数据格式,并不是所有的数据格式
【定义】
typedef enum {
/\*yuv\*/
 PIXEL_FORMAT_YVU_PLANAR_420,
 PIXEL_FORMAT_YVU_PLANAR_422,
/\*RGB\*/
 PIXEL_FORMAT_RGB_565,
 PIXEL_FORMAT_RGB_888,
/\*ARGB\*/
 PIXEL_FORMAT_ARGB_8888,
 PIXEL_FORMAT_ARGB_4444,
 PIXEL_FORMAT_ARGB_1555,
 PIXEL_FORMAT_RGB_MONOCHROME_8BPP,
}k_pixel_format;
【成员】
| 成员名称 | 描述 |
|---|---|
| PIXEL_FORMAT_YVU_PLANAR_420 | YUV420 NV12 |
| PIXEL_FORMAT_YVU_PLANAR_422 | YUV422 NV16 |
| PIXEL_FORMAT_RGB_565 | RGB565 |
| PIXEL_FORMAT_RGB_888 | RGB888 |
| PIXEL_FORMAT_RGB_MONOCHROME_8BPP | 8 BIT RGB |
| PIXEL_FORMAT_ARGB_8888 | ARGB8888 |
| PIXEL_FORMAT_ARGB_4444 | ARGB4444 |
| PIXEL_FORMAT_ARGB_1555 | ARGB1444 |
【注意事项】
无
【相关数据类型及接口】
无
3.1.4 k_vo_osd
【说明】
OSD 的数量和每一个osd 的编号
【定义】
typedef enum {
 K_VO_OSD0,
 K_VO_OSD1,
 K_VO_OSD2,
 K_VO_OSD3,
 K_MAX_VO_OSD_NUM,
}k_vo_osd;
【成员】
| 成员名称 | 描述 |
|---|---|
| K_VO_OSD0 | 第0层osd |
| K_VO_OSD1 | 第1层osd |
| K_VO_OSD2 | 第2层osd |
| K_VO_OSD3 | 第3层osd |
| K_MAX_VO_OSD_NUM | Osd 层最大数量标志 |
【注意事项】
无
【相关数据类型及接口】
无
3.1.5 k_vo_layer
【说明】
layer 的数量和每一个layer的编号
【定义】
typedef enum {
 K_VO_LYAER0 = 0,
 K_VO_LYAER1,
 K_VO_LYAER2,
 K_MAX_VO_LAYER_NUM,
}k_vo_layer;
成员】
| 成员名称 | 描述 |
|---|---|
| K_VO_LYAER0 | 第0层layer |
| K_VO_LYAER1 | 第1层layer |
| K_VO_LYAER2 | 第2层layer |
| K_VO_LYAER3 | 第3层layer |
| K_MAX_VO_LAYER_NUM | layer 层最大数量标志 |
【注意事项】
无
【相关数据类型及接口】
无
3.1.6 k_vo_rotation
【说明】
Layer rotation 支持的功能
【定义】
typedef enum {
 K_ROTATION_0 = (0x01L \<\< 0),
 K_ROTATION_90 = (0x01L \<\< 1),
 K_ROTATION_180 = (0x01L \<\< 2),
 K_ROTATION_270 = (0x01L \<\< 3),
} k_vo_rotation;
【注意事项】
无
【相关数据类型及接口】
无
3.1.7 k_vo_mirror_mode
【说明】
Layer mirror 支持的功能。
【定义】
typedef enum {
 K_VO_MIRROR_NONE = (0x01L \<\< 4),
 K_VO_MIRROR_HOR = (0x01L \<\< 5),
 K_VO_MIRROR_VER = (0x01L \<\< 6),
 K_VO_MIRROR_BOTH = (0x01L \<\< 7),
} k_vo_mirror_mode;
【成员】
| 成员名称 | 描述 |
|---|---|
| K_VO_MIRROR_NONE | Layer 不做mirror |
| K_VO_MIRROR_HOR | Layer 只做水平mirrot |
| K_VO_MIRROR_VER | Layer只做垂直mirror |
| K_VO_MIRROR_BOTH | Layer做垂直和水平mirror |
【注意事项】
无
【相关数据类型及接口】
无
3.1.8 k_vo_user_sync_info
【说明】
用户自定义做时钟分频。
【定义】
typedef struct {
 k_u32 ext_div;
 k_u32 dev_div;
 k_u32 clk_en;
} k_vo_user_sync_info;
【成员】
| 成员名称 | 描述 |
|---|---|
| ext_div; | Clkext 分频 |
| dev_div | Clk 分频 |
| clk_en | Display 时钟使能 |
【注意事项】
无
【相关数据类型及接口】
无
3.1.9 k_vo_point
【说明】
定义坐标信息结构体。
【定义】
typedef struct {
 k_u32 x;
 k_u32 y;
}k_vo_point;
【成员】
| 成员名称 | 描述 |
|---|---|
| x | 横坐标 |
| y | 纵坐标 |
【注意事项】
无
【相关数据类型及接口】
无
3.1.10 k_vo_size
【说明】
定义大小信息结构体。
【定义】
typedef struct {
 k_u32 width;
 k_u32 height;
} k_vo_size;
【成员】
| 成员名称 | 描述 |
|---|---|
| width | 宽度 |
| height | 高度 |
【注意事项】
无
【相关数据类型及接口】
无
3.1.11 k_vo_video_layer_attr
【说明】
定义 display layer 层属性
【定义】
typedef struct {
 k_point display_rect;
 k_size img_size;
 k_pixel_format pixel_format;
 k_u32 stride;
 k_u32 uv_swap_en;
 k_u32 alptha_tpye; //only osd use
} k_vo_video_layer_attr;
【成员】
| 成员名称 | 描述 |
|---|---|
| display_rect; | OSD图层的的起始位置 |
| img_size | 图像分辨率结构体,即合成画面的尺寸 |
| pixel_format | 视频层支持的数据格式 |
| stride | 图像的stride |
| uv_swap_en | Uv 交换 |
| alptha_tpye | Alptha 的类型,仅osd层使用。分为固定alpha(可分为256等级)、以 RGB 中R作为alpha 通道、以 RGB 中G作为alpha 通道、以 RGB 中B作为alpha 通道、以alpha 通道作为alpha |
【注意事项】
alptha_tpye 仅对osd 层使用
【相关数据类型及接口】
无
3.1.12 k_vo_wbc_attr
【说明】
定义 writeback属性。
【定义】
typedef struct {
 [k_vo_size](#3110-k_vo_size) target_size;
 [k_pixel_format](#313-k_pixel_format) pixel_format;
 k_u32 stride;
 k_u32 y_phy_addr;
} k_vo_wbc_attr;
【成员】
| 成员名称 | 描述 |
|---|---|
| target_size | 回写的目标大小 |
| pixel_format | 回写的数据格式 |
| pixel_format | 数据格式 |
| stride; | 回写的stride |
| y_addr | 图像回写的物理地址 |
【注意事项】
y_addr 需要分配空间
【相关数据类型及接口】
无
3.1.13 k_vo_pub_attr
【说明】
配置视频输出设备的公共属性。
【定义】
typedef struct {
 k_u32 bg_color; //yuv
 [k_vo_intf_type](#312-k_vo_intf_type) intf_type;
 [k_vo_intf_sync](#311-k_vo_intf_sync) intf_sync;
 [k_vo_display_resolution](#3116-k_vo_display_resolution) \*sync_info;
 }k_vo_pub_attr; |
【成员】
| 成员名称 | 描述 |
| bg_color | 背景色 |
| type | 接口类型,目前只支持mipi |
| intf_sync | 视频中的分辨率和帧率 |
| sync_info | 图像输出的时序 |
【注意事项】
无
【相关数据类型及接口】
无
3.1.14 k_vo_scaler_attr
【说明】
定义 scaler 属性
【定义】
typedef struct{
 k_size in_size;
 k_size out_size;
 k_u32 stride;
}k_vo_scaler_attr;
【成员】
| 成员名称 | 描述 |
|---|---|
| in_size | 输入的尺寸 |
| out_size | 输出的尺寸 |
| stride | 输入的stride |
| y_addr | 图像回写的物理地址 |
【注意事项】
无
【相关数据类型及接口】
无
3.1.15 k_vo_draw_frame
【说明】
定义 画框的 属性
【定义】
typedef struct {
 k_u32 draw_en;
 k_u32 line_x_start;
 k_u32 line_y_start;
 k_u32 line_x_end;
 k_u32 line_y_end;
 k_u32 frame_num;
}k_vo_draw_frame;
【成员】
| 成员名称 | 描述 |
|---|---|
| draw_en | 画框使能 |
| line_x_start | X 方向的起始 |
| line_y_start | y方向的起始 |
| line_x_end | X方向的终点未知 |
| line_y_end | y方向的终点未知 |
| frame_num | 当前框的num号 【0 - 16】 |
【注意事项��】
无
【相关数据类型及接口】
无
3.1.16 k_vo_display_resolution
【说明】
Display timing属性。
【定义】
typedef struct{
 k_u32 pclk;
 k_u32 phyclk;
 k_u32 htotal;
 k_u32 hdisplay;
 k_u32 hsync_len;
 k_u32 hback_porch;
 k_u32 hfront_porch;
 k_u32 vtotal;
 k_u32 vdisplay;
 k_u32 vsync_len;
 k_u32 vback_porch;
 k_u32 vfront_porch;
} k_vo_display_resolution;
【成员】
| 成员名称 | 描述 |
|---|---|
| pclk | Vo 的pix clk 频率 |
| phyclk | d-phy 的频率 |
| htotal | 一行的总像素 |
| hdisplay | 一行的有效像素个数 |
| hsync_len | 行同步的像素个数 |
| hback_porch | 后肩 的像素个数 |
| hfront_porch | 前肩 的像素个数 |
| vtotal | 总行数 |
| vdisplay | 一帧有效的行数 |
| vsync_len | 帧同步的像素个数 |
| vback_porch | 后肩 的行数 |
| vfront_porch | 前肩 的行数 |
【注意事项】
无
【相关数据类型及接口】
无
3.1.17 k_vo_mipi_phy_attr
]【说明】
定义 mipi phy 频率的结构体
【定义】
typedef struct {
 k_u32 n;
 k_u32 m;
 k_u32 voc;
 k_u32 phy_lan_num;
 k_u32 hs_freq;
}k_vo_mipi_phy_attr;
【成员】
| 成员名称 | 描述 |
|---|---|
| n | Pll 系数 |
| m | Pll 系数 |
| voc | Pll 系数 |
| hs_freq | Phy 的频�率范围 |
| phy_lan_num | Phy 的lan 数量 |
【注意事项】
无
【相关数据类型及接口】
无
3.1.18 k_vo_video_osd_attr
【说明】
配置osd层的公共属性。
【定义】
typedef struct {
 [k_vo_point](#3110-k_vo_size) display_rect;
 [k_vo_size](#3110-k_vo_size) img_size;
 [k_pixel_format](#313-k_pixel_format) pixel_format;
 k_u32 stride;
 k_u8 global_alptha;
} k_vo_video_osd_attr;
【成员】
| 成员名称 | 描述 |
|---|---|
| display_rect | 位置信息 |
| img_size | 有效的size |
| pixel_format | 数据格式 |
| stride; | Stride |
| global_alptha | 透明度 |
【注意事项】
无
【相关数据类型及接口】
无
3.1.19 k_video_frame_info
【说明】
一帧的信息。
【定义】
typedef struct {
 k_video_frame v_frame; /\*\*\< Video picture frame \*/
 k_u32 pool_id; /\*\*\< VB pool ID \*/
 k_mod_id mod_id; /\*\*\< Logical unit for generating video frames \*/
} k_video_frame_info;
【成员】
| 成员名称 | 描述 |
|---|---|
| v_frame | 帧的信息 |
| pool_id | VB pool ID |
| mod_id | Video帧的id |
【注意事项】
无
【相关数据类型及接口】
无
3.1.20 k_connector_type
【说明】
连接屏幕的类型。
【定义】
typedef enum {
 HX8377_V2_MIPI_4LAN_1080X1920_30FPS;
 LT9611_MIPI_4LAN_1920X1080_60FPS;
 LT9611_MIPI_4LAN_1920X1080_30FPS;
} k_connector_type;
【成员】
| 成员名称 | 描述 |
|---|---|
| v_frame | 帧的信息 |
| HX8377_V2_MIPI_4LAN_1080X1920_30FPS | hx8377屏幕初始化 |
| LT9611_MIPI_4LAN_1920X1080_60FPS | hdmi 1080p60 初始化 |
| LT9611_MIPI_4LAN_1920X1080_30FPS | hdmi 1080p30 初始化 |
【注意事项】
无
【相关数据类型及接口】
无
3.1.21 k_dsi_lan_num
【说明】
dsi 的 lane 数量。
【定义】
typedef enum {
 K_DSI_1LAN = 0,
 K_DSI_2LAN = 1,
 K_DSI_4LAN = 3,
} k_dsi_lan_num;
【成员】
| 成员名称 | 描述 |
|---|---|
| K_DSI_1LAN | 1线模式 |
| K_DSI_2LAN | 2线模式 |
| K_DSI_4LAN | 4线模式 |
【注意事项】
无
【相关数据类型及接口】
无
3.1.22 k_dsi_work_mode
【说明】
dsi 的工作模式
【定义】
typedef enum{
 K_BURST_MODE = 0,
 K_NON_BURST_MODE_WITH_SYNC_EVENT = 1,
 K_NON_BURST_MODE_WITH_PULSES = 2,
} k_dsi_work_mode;
【成员】
| 成员名称 | 描述 |
|---|---|
| K_BURST_MODE | dsi 工作在brust mode |
| K_NON_BURST_MODE_WITH_SYNC_EVENT | dsi 工作在 non brust event mode |
| K_NON_BURST_MODE_WITH_PULSES | dsi 工作在 non brust pulses mode |
【注意事项】
无
【相关数据类型及接口】
无
3.1.23 k_vo_dsi_cmd_mode
【说明】
dsi 发送命令的模式。
【定义】
typedef enum {
 K_VO_LP_MODE,
 K_VO_HS_MODE,
} k_vo_dsi_cmd_mode;
【成员】
| 成员名称 | 描述 |
|---|---|
| K_VO_LP_MODE | lp 模式发送命令 |
| K_VO_HS_MODE | hs 模式发送命令 |
【注意事项】
无
【相关数据类型及接口】
无
3.1.24 k_connectori_phy_attr
【说明】
connector 连接器 配置phy 的信息。
【定义】
typedef struct {
 k_u32 n;
 k_u32 m;
 k_u32 voc;
 k_u32 hs_freq;
} k_connectori_phy_attr;
【成员】
| 成员名称 | 描述 |
|---|---|
| n | Pll 系数 |
| m | Pll 系数 |
| voc | Pll 系数 |
| hs_freq | Phy 的频率范围 |
【注意事项】
无
【相关数据类型及接口】
无
3.1.25 k_connector_info
【说明】
连接器的信息。
【定义】
typedef struct {
 const char *connector_name;
 k_u32 screen_test_mode;
 k_u32 dsi_test_mode;
 k_u32 bg_color;
 k_u32 intr_line;
 [k_dsi_lan_num](#3121-k_dsi_lan_num) lan_num;
 [k_dsi_work_mode](#3122-k_dsi_work_mode) work_mode;
 [k_vo_dsi_cmd_mode](#3123-k_vo_dsi_cmd_mode) cmd_mode;
 [k_connectori_phy_attr](#3124-k_connectori_phy_attr) phy_attr;
 [k_vo_display_resolution](#3116-k_vo_display_resolution) resolution;
 [k_connector_type](#3120-k_connector_type) type;
} k_connector_info;
【成员】
| 成员名称 | 描述 |
|---|---|
| v_frame | 帧的信息 |
| pool_id | VB pool ID |
| mod_id | Video帧的id |
【注意事项】
无
【相关数据类型及接口】
无
3.1.26 k_connector_negotiated_data
【说明】
Display驱动和HDMI显示器协商后的数据
【定义】
typedef struct {
 k_u32 connection_status;
 k_u32 negotiated_count;
 k_connector_type negotiated_types[256];
} k_connector_negotiated_data;
【成员】
| 成员名称 | 描述 |
|---|---|
| connection_status | HDMI接口连接状态 |
| negotiated_count | Display驱动和HDMI显示器协商后,Display驱动支持的分辨率数量 |
| negotiated_types[256] | Display驱动和HDMI显示器协商后,Display驱动支持的分辨率列表, negotiated_types[0]表示最佳分辨率 |
【注意事项】
无
【相关数据类型及接口】
无
3.1.27 k_connector_mirror
【说明】
Display驱动的mirror 功能
【定义】
typedef enum {
 K_CONNECTOR_MIRROR_HOR = 1,
 K_CONNECTOR_MIRROR_VER,
 K_CONNECTOR_MIRROR_BOTH,
}k_connector_mirror;
【成员】
| 成员名称 | 描述 |
|---|---|
| K_CONNECTOR_MIRROR_HOR | 横向mirror |
| K_CONNECTOR_MIRROR_VER | 纵向mirror |
| K_CONNECTOR_MIRROR_BOTH | 横向和纵向都mirror |
【注意事项】
无
【相关数据类型及接口】
无
4. 错误码
表 41 xxx API 错误码
| 错误代码 | 宏定义 | 描述 |
|---|---|---|
| 0xa00b8006 | K_ERR_VO_NULL_PTR | 参数空指针错误 |
| 0xa00b8001 | K_ERR_VO_INVALID_DEVID | 无效dev id |
| 0xa00b8002 | K_ERR_VO_INVALID_CHNID | 无效 chn id |
| 0xa00b8005 | K_ERR_VO_UNEXIST | 视频缓存不存在 |
| 0xa00b8004 | K_ERR_VO_EXIST | 视频缓存存在 |
| 0xa00b8003 | K_ERR_VO_ILLEGAL_PARAM | 参数设置无效 |
| 0xa00b8010 | K_ERR_VO_NOTREADY | vo还未就绪 |
| 0xa00b8012 | K_ERR_VO_BUSY | 系统忙 |
| 0xa00b8007 | K_ERR_VO_NOT_CONFIG | 不允许配置 |
| 0xa00b8008 | K_ERR_VO_NOT_SUPPORT | 不支持的操作 |
| 0xa00b8009 | K_ERR_VO_NOT_PERM | 操作不允许 |
| 0xa00b800c | K_ERR_VO_NOMEM | 分配内存失败 |
| 0xa00b800d | K_ERR_VO_NOBUF | 没有buff |
| 0xa00b800e | K_ERR_VO_BUF_EMPTY | Buf 为空 |
| 0xa00b800f | K_ERR_VO_BUF_FULL | Buf 为满 |
| 0xa00b8011 | K_ERR_VO_BADADDR | 错误的地址 |
| 0xa00b8012 | K_ERR_VO_BUSY | 系统忙 |