K230 SDK Dewarp 使用指南
1. Dewarp 标定介绍
Dewarp 标定过程产生一个包含相机矩阵和畸变系数的 YAML 文件,K230 SDK 在构建时会通过这个 YAML 文件来生成 remap 文件,并放入大核根文件系统的 /bin 目录下,在配置 VICAP 时将 k_vicap_dev_attr 结构体的 dw_enable 设为1来启用 Dewarp,VICAP 会在当前路径下查找 <sensor_name>-<width>x<height>.bin (例如对于 IMX335 全分辨率,即为 imx335-2592x1944.bin)文件作为 Dewarp 配置文件进行畸变矫正。
1.1 抓取图像
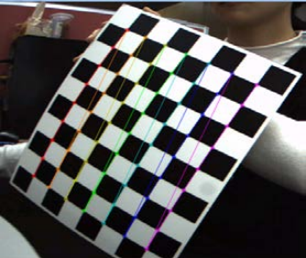
- 在同一平面上旋转棋盘并拍摄至少 20 张图片
- 选择涵盖所有角度至少10张照片保存到一个固定目录,推荐选择差异较大的图片
可以使用 sample_vicap.elf 这个程序进行抓取,将保存的YUV文件通过ffmpeg转换为 png/bmp 等易于OpenCV读取的图像格式,参考如下命令
ffmpeg -f rawvideo -pixel_format nv12 -video_size 2592x1944 -i dev_00_chn_00_2592x1944_0000.yuv420sp 0.png
1.3 Dewarp 模式介绍
Dewarp 有多种模式,这里介绍两种,镜头校正(lens correction)和分屏(split screen)。
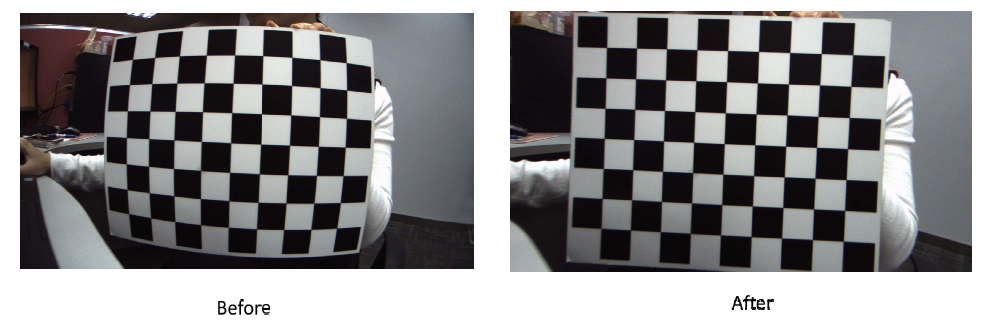
镜头校正
镜头校正实际上是使用Brown-Conrady畸变模型。输入参数包括相机内部矩阵中的u0、v0、fx和fy,畸变系数中的k1、k2、p1、p2、k3、k4、k5和k6,以及fovRatio,这些参数都可以通过上一步的表标定得到,校正效果如下
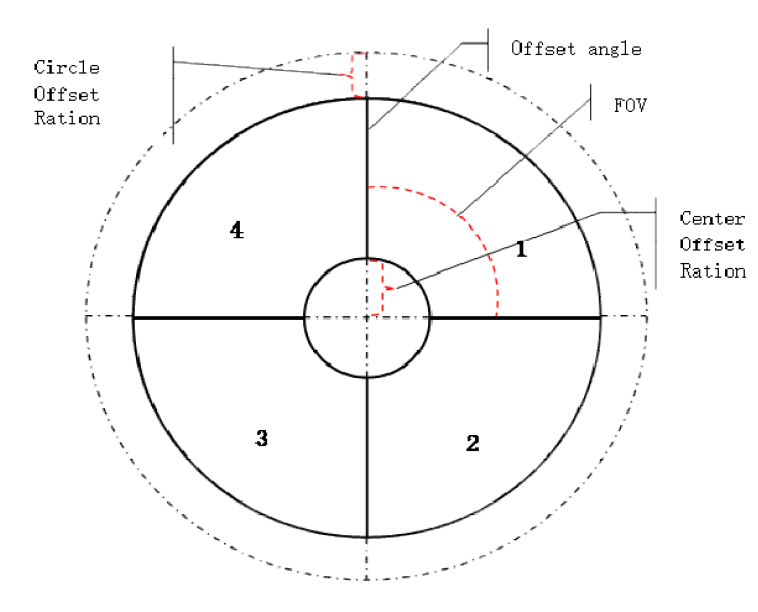
分屏
分屏模式不需要标定相机。
下图中的每个扇形图像都被校正为一个小的矩形分屏图像。每个小分屏图像的计算方法类似。在计算每个小图像之后,需要将每个小图像的相应坐标数组拼接成大图像的坐标数组。例如,其中一个小图像的坐标计算过程如下所示。输入参数包括CenterOffsetRatio、CircleOffsetRatio、maxRadius、图像宽度和图像高度,这些参数是每个小输出图像的尺寸,以及输入图像的中心点centerX和centerY。输出的outputX和outputY是相对于输出小图像的坐标。
1.2 执行标定程序
创建包含图片路径的xml文件,例如 imx335-2592x1944-0.xml,填入上一步保存的图片路径,形如
<?xml version="1.0"?>
<opencv_storage>
<images>
images/imx335-2592x1944-0/0.png
...
</images>
</opencv_storage>
编辑 run.bat,将最后一个参数改为刚才创建的 XML 文件路径,将 -o 参数改为保存输出的 YAML 文件路径,然后执行 run.bat
2. Dewarp 与 VICAP 模块配合使用
VICAP 通过加载 Dewarp 配置文件来控制畸变校正,K230 SDK编译后生成的Dewarp配置文件放置在 <K230 SDK> src/big/mpp/userapps/src/sensor/config 下,后缀名为 .bin 的都是 dewarp 配置文件,其内容的前8个字节为分屏参数,之后全部的内容都是映射表,VICAP会根据文件名匹配当前sensor进行加载。
镜头校正模式
注意:打开Dewarp需要一个额外的vb pool,并将设备属性的 buf_size改为sensor输出buffer大小,可以参考 sample_vicap.c 中 sample_vicap_vb_init 函数的做法来初始化vb pool。
在上一步中生成的 YAML 文件需要放入 <K230 SDK>/src/big/mpp/userapps/src/sensor/dewarp 目录下,编译 K230 SDK。
如果之前已经编译过 K230 SDK,那么可以不用完整重新编译,放置好 YAML 文件后直接运行 make mpp-apps 即可,如果需要制作镜像则还需要运行 make build-image。
分屏模式
在 K230 SDK 中内置了一个用于生成分屏模式配置文件的程序,源码放在 <K230 SDK>/src/big/mpp/userapps/src/sensor/dewarp/k230dwmapgen/exe/split_screen.c,K230 SDK完整编译后会在 <K230 SDK>/src/big/mpp/userapps/src/sensor/build 目录生成一个 k230dwmapgen-splitscreen 的程序,运行后会将配置文件通过标准输出打印,如果需要保留可以将其重定向到文件,此程序默认为1280x720的相机配置分屏,如果需要修改参数可以修改其源码中 CreateUpdateWarpPolarMap 函数的参数,重新编译和运行。