K230 USB应用实战-UVC传输YUV及编码码流
概述
本文将讲解如何在k230开发板上实现USB摄像头功能。也就是把K230 开发板连接到电脑,电脑可以通过播放器播放K230摄像头采集到的图像。
1. 环境准备
1.1 硬件环境
- K230-UNSIP-LP3-EVB-V1.0/K230-UNSIP-LP3-EVB-V1.1
- Ubuntu PC 20.04
- Typec USB线 * 1 至少
- USB TypeC转以太网(如果使用TFTP加载和NFS文件系统)
- 网线一根
- SD卡(如果使用SD卡启动,或软件需要访问SD卡)
1.2 软件环境
k230_sdk中提供了工具链,分别在如下路径。
- 大核rt-samrt工具链
k230_sdk/toolchain/riscv64-linux-musleabi_for_x86_64-pc-linux-gnu
- 小核linux工具链
k230_sdk/toolchain/Xuantie-900-gcc-linux-5.10.4-glibc-x86_64-V2.6.0
也可通过以下链接下载工具链
wget https://download.rt-thread.org/rt-smart/riscv64/riscv64-unknown-linux-musl-rv64imafdcv-lp64d-20230222.tar.bz2
wget https://occ-oss-prod.oss-cn-hangzhou.aliyuncs.com/resource//1659325511536/Xuantie-900-gcc-linux-5.10.4-glibc-x86_64-V2.6.0-20220715.tar.gz
2. SDK UVC demo体验
2.1 release sdk编译固件,烧录固件
参考 《环境搭建》和《开发板上手使用》章节描述
2.2 执行命令测试demo
参考 《K230_SDK_Demo使用指南》 2.9 UVC_demo 章节
3. 如何开发UVC功能
3.1 USB/UVC协议
3.1.1 USB协议
USB协议内容比较多,是用得非常普遍的接口,互联网上资料很多。本文只描述一些我认为有助于对USB协议理解的点。
USB2.0有4条线,VBUS/GND/D+/D-,差分信号传输。低速/全速使用3.3V电压,高速使用400mV电压。除了传递数据的差分0/1信号外,其他的一些电压组合可以用来作为速度识别,空闲、复位、唤醒等信号。
PHY可以理解为做一个并转串的操作,把UTMI+信号转成D+/D-的差分信号。

理论上两条数据信号完全可以使用gpio来进行控制,只是协议太复杂,且gpio的变化速度太慢。无论是SPI/SDIO/UART/IIC等等这些接口控制器都是这样,控制器尽可能提供给软件必要的接口,且让软件做尽可能少的操作。USB控制器也就是把协议的功能尽可能让硬件来做,比如速度协商,收到数据包后自动产生应答包等等功能。提供一些寄存器接口告知软件当前USB通信的状态。当然最重要的是提供传输数据的接口,让软件可以收发不同的数据,收发数据一般都会使用DMA。
USB传输数据是以包为基本单位的。下图为包的构成

PID决定了包的类型,令牌包、数据包、握手包和特殊包,不同的包类型包含的字段成分不一样,比如数据包只包含PID+数据+CRC,握手包只有PID。
包组成了事务,令牌包+数据包(可选)+握手包(可选)。下图使用南京沁恒出的USB2.0高速总线分析仪捕获的USB交互信息,如果想捕获USB线上的数据比较推荐这款仪器。
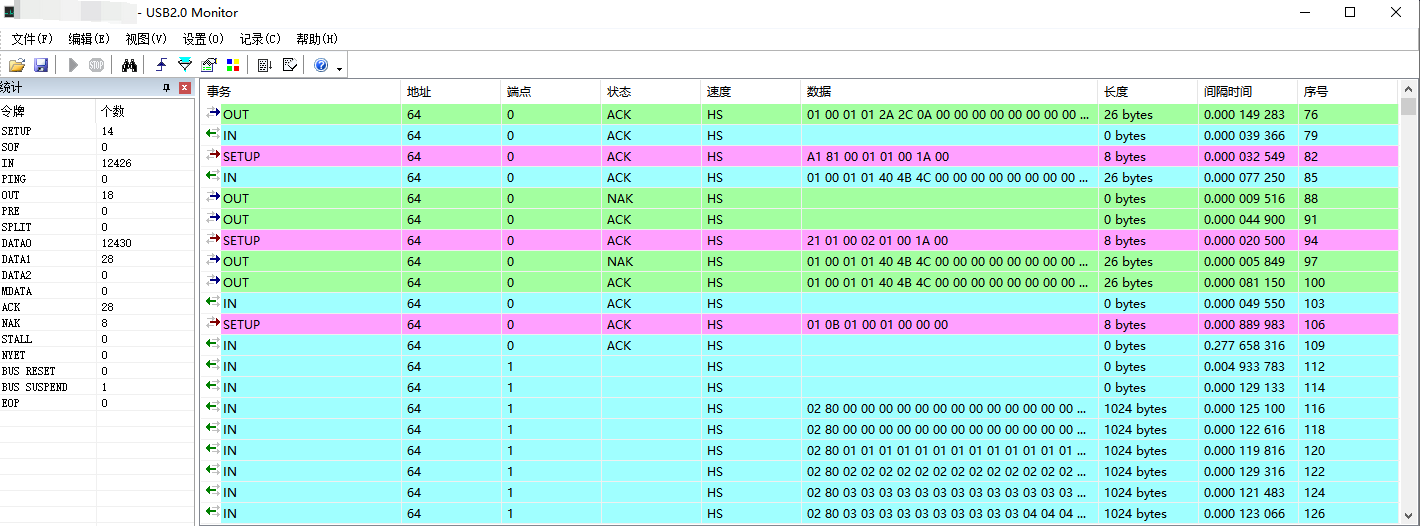
可以看到前面是枚举传输,包含SETUP事务,数据IN/OUT事务,状态IN/OUT事务。后面是同步传输,包含数据IN事务。
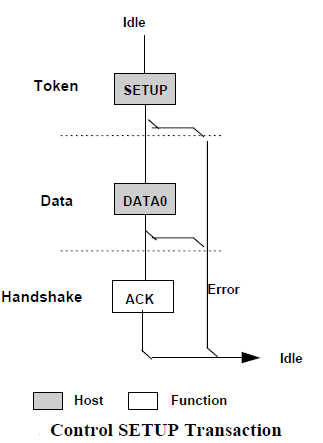
传输是由单次或多次事务组成,有4种传输类型:
控制传输-在枚举阶段使用,所有的USB设备连接主机时,都需要一套统一的协议去识别各种USB设备类型。USB控制器初始阶段会让0端点为双向控制端点。
中断传输-小数据量和不连续,且实时性要求高的场合。比如鼠标键盘。
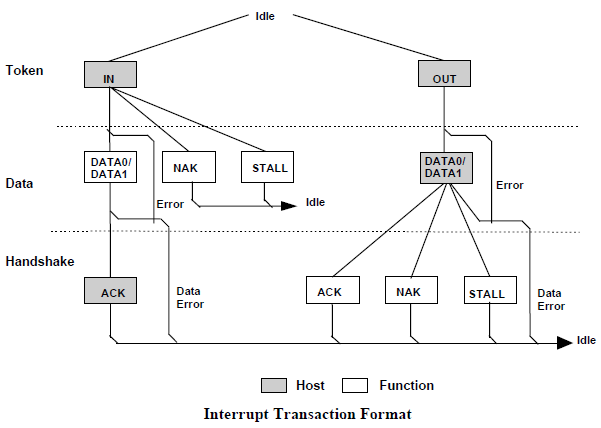
同步传输-数据量大、连续,且要求实时性的场合。比如USB摄像头设备。

批量传输-用于数据量大,但没有实时性要求的场合。比如U盘设备。
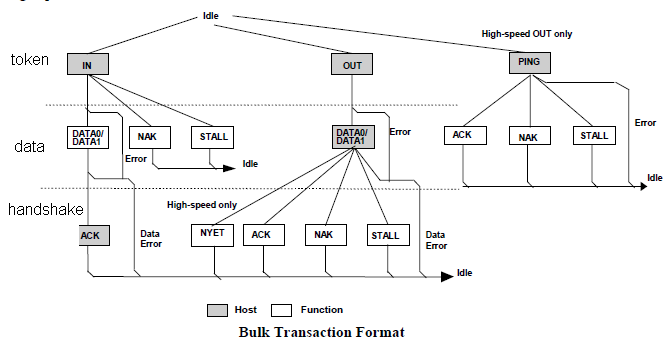
无论是什么样的USB设备协议,都是通过这4种传输来实现的。所以像linux这样的操作系统的USB协议栈,提供了这4种传输方式的接口。
3.1.2 UVC协议
3.1.2.1 UVC描述符
USB的描述符用于让主机知道设备的属性信息。设备刚连接主机时,主机会发送所有设备都支持的请求命令。通用的描述符包含设备描述符、配置描述符、接口描述符、端点描述符、字符串描述符。不同的设备类型可能会定义特有的描述符,用于对设备的描述扩展。
windows上可以使用UsbTreeView软件查看USB设备的描述符。下图展示了一个UVC设备其描述符的整体布局。
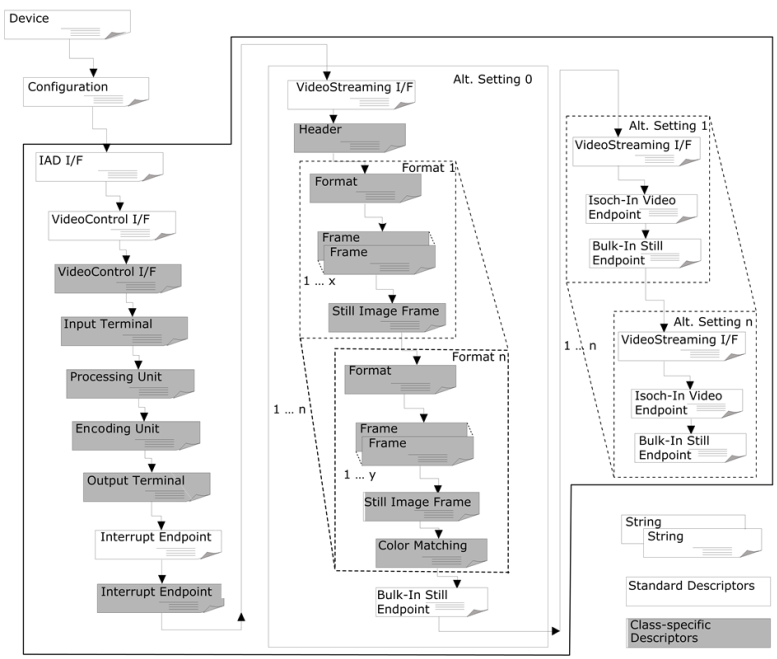
在该布述符布局中,首先第一项是设备描述符,其次是配置描述符,该设备拥有一个配置描述符。配置描述符后接一个接口关联描述符IAD,接口关联描述符IAD拥有一个视频控制接口VC和N个视频流接口。
视频控制接口包括视视频控制接口头描述符、输入终端描述符、处理单元描述符、编码单元描述符、输出终端描述符、中断断点描述符�。
视频流接口中包括一个接口和与其对应的多个转换设置接口(Alternate Setting)。
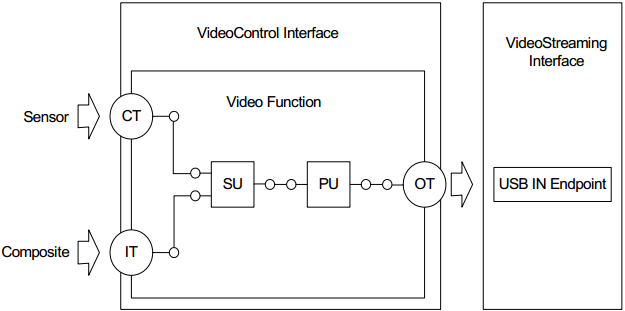
主机端通过视频控制接口描述符,可以知晓UVC摄像头的拓扑结构,并进行控制。比如处理单元PU,包括背光、对比度、色度等等调节,主机端先通过描述符获知哪些是可调节项,然后再与UVC设备交互获知控制范围信息。
3.1.2.2 UVC视频流格式选择
VS接口包含许多Format(YUV/MJPEG/H264等),每个Format包含多个Frame(各种分辨率)。参数设置的过程需要主机和USB设备进行协商, 协商的过程大致如下图所示:
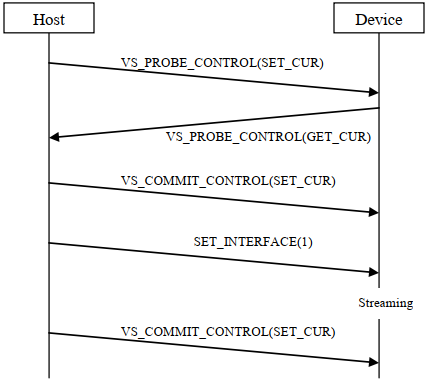
流程说明:
- Host 先将期望的设置发送给USB设备(PROBE)
- 设备将Host期望设置在自身能力范围之内进行修改,返回给Host(PROBE)
- Host 认为设置可行的话,Commit 提交(COMMIT)
- 设置接口的当前设置为某一个设置
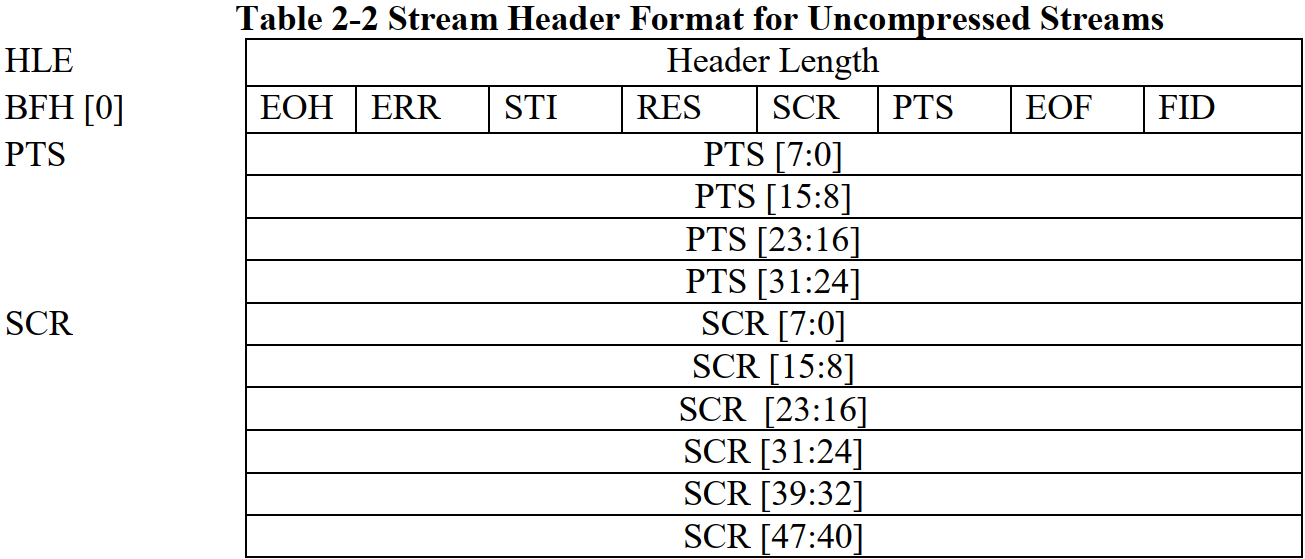
3.1.2.3 UVC视频流负载
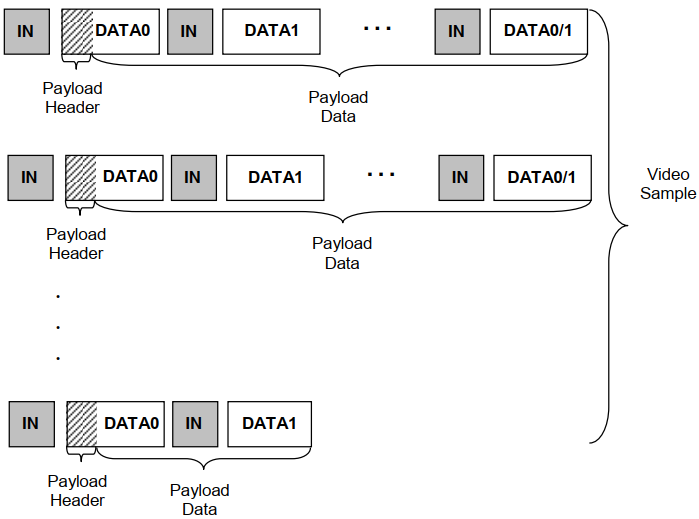
可以看到payload data前面包含一个header,payload data包含多个USB包,主机端是如何识别一帧图像数据的呢?通过payload header来识别。
payload header固定前2字节和后面的扩展部分。重点关注FID-不同的格式规定有差异。但所有的格式都是使用该bit在0和1之间切换来识别新一帧图像数据的。
3.2 linux驱动层
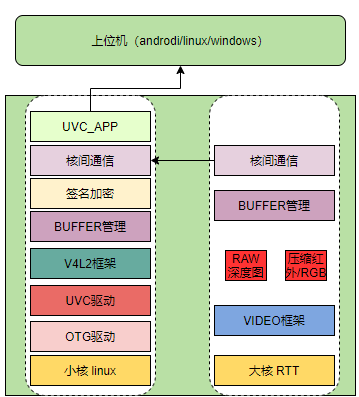
K230的SDK设计,为了性能把视频音频功能放在大核RTT上。linux上USB的功能实现很成熟,所以基于linux开发UVC功能,通过核间mapi通信获取大核视频数据。
3.2.1 控制器驱动

K230集成了新思科技的USB模块,linux/drivers/usb/dwc2目录为该控制器的驱动。
目前的SDK设计UVC固定使用USB1,otg通过ID信号识别为device模式。
platform.c,做一些复位,注册中断,配置参数等操作。SDK的USB默认支持buffer DMA模式。Scatter Gather DMA模式可以提升ISO传输性能,HOST模式使用该DMA模式不能支持HUB。
gadget.c,重点关注该驱动代码,dwc2_gadget_init初始化重要的结构体,gadget.ops和ep.ops。usb_ep_ops的queue就是提交数据收发的请求,实际上是把这个请求放到一个处理链表。USB会挨个处理这些链表上的请求然后上报完成回调。
//设备树
usbotg1: usb-otg@91540000 {
compatible = "kendryte,k230-otg";
reg = <0x0 0x91540000 0x0 0x10000>;
interrupt-parent = <&intc>;
interrupts = <174>;
g-rx-fifo-size = <512>;
g-np-tx-fifo-size = <64>;
g-tx-fifo-size = <512 1024 64 64 64 64>;
dr_mode = "otg";
otg-rev = <0x200>;
};
3.2.2 gadget驱动
源码位于linux/drivers/usb/gadget
- legacy:整个Gadget 设备驱动的入口。位于driver/usb/gadget/legacy下,里面给出了常用的usb类设备的驱动sample。其作用就是配置USB设备描述符信息,提供一个usb_composite_driver, 然后注册到composite层。也可以通过functionfs动态创建,这种方式更灵活,K230提供的usb gadget demo都是采用这种方式。
- functions:各种usb 子类设备功能驱动。位于driver/usb/gadget/functions,里面也给出了对应的sample。其作用是配置USB子类协议的接口描述以及其他子类协议,比如uvc协议,hid等。uvc涉及到的相关文件uvc_video.c、uvc_v4l2.c、uvc_queue.c、uvc_configfs.c、f_uvc.c
K230的UVC几乎未对gadget驱动层做修改,仅仅是移植了支持H264格式功能和扩展单元。
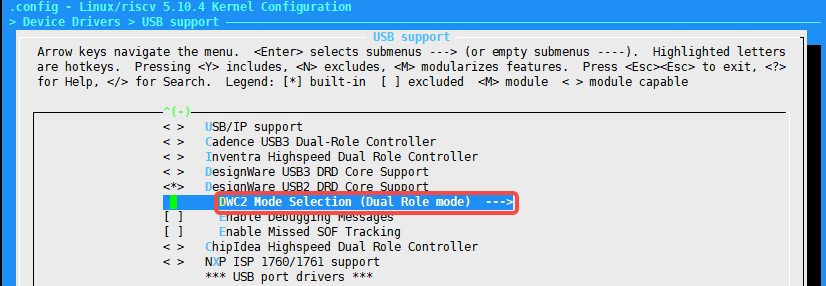
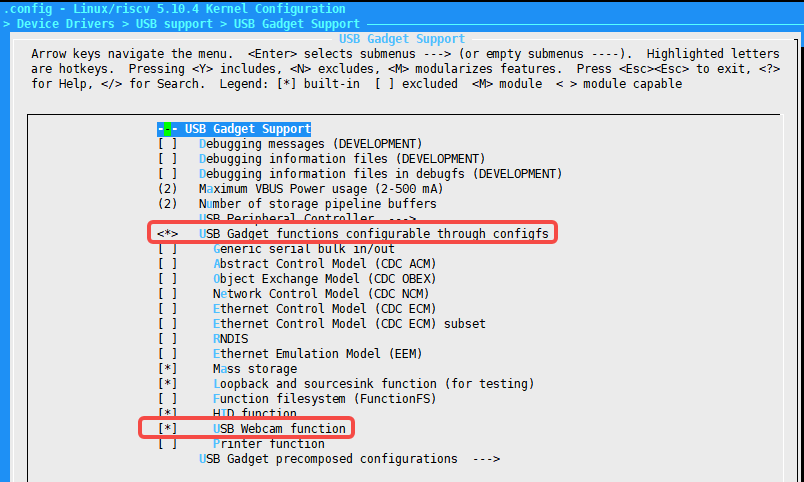
linux编译内核添加USB Gadget框架
-> Device Drivers
-> USB support
-> USB Gadget Support
uvc涉及到v4l2模块的功能,还需要添加media框架
-> Device Drivers
-> Multimedia support
-> Media core support
-> Media core support

3.3 uvc-gadget应用层
从K230的SDK设计架构可以看到,K230的UVC功能与单纯的linux上的uvc功能的差别就是获取视频数据的方式是通过核间通信从大核RTT获取的。
K230 UVC应用层的代码位置:cdk/user/mapi/sample/camera
源代码文件描述:
application.c - 主函数
camera.c - 提供摄像头对象操作,可以包含uvc/uac的控制
frame_cache.c - 复杂buffer的管理
kstream.c - 实现视频流操作
kuvc.c - 实现kuvc对象操作
sample_venc.c - 通过mapi从大核获取编码图像的操作
sample_yuv.c - 通过mapi从大核获取YUV图像的操作
uvc-gadget.c - 实现uvc设备操作
调试的步骤是先移植linux上通用的uvc_app,在linux上跑通standalone功能,也就是播放固定图像数据。然后再调试播放真实摄像头图像数据的功能。
下面是K230 UVC APP的设计流程图
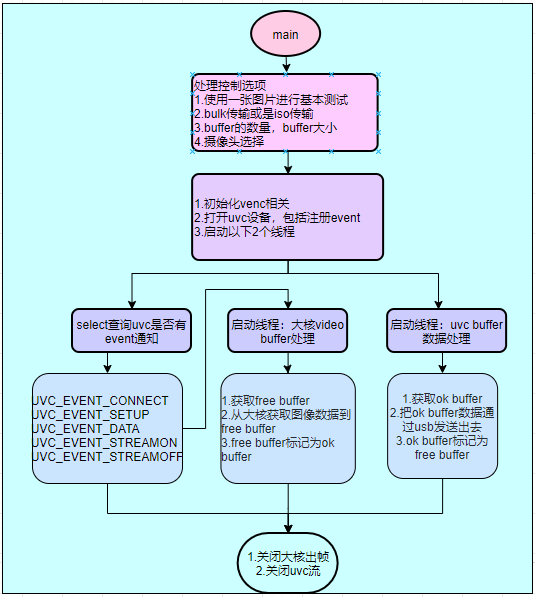
uvc app大部分操作都是通用的操作,互联网上资料比较多。这里说一下K230私有的操作,重点关注venc_normalp_classic函数的处理。
- 首先配置vicap 设备属性信息,包括摄像头类型等 kd_mapi_vicap_set_dev_attr
- 获取摄像头信息,主要是获取摄像头输出的图像分辨率 k_vicap_sensor_info
- 根据需要从vicap输出的图像计算出需要的vb buffer大小,并分配好buffer kd_mapi_media_init
- 配置通道属性,包括输出的分辨率,格式等 kd_mapi_vicap_set_chn_attr
- 启动video处理 kd_mapi_vicap_start
- 获取一帧图像 kd_mapi_vicap_dump_frame
- 释放图像 buffer kd_mapi_vicap_release_frame
- 初始化venc模块,包括编码格式,帧率,分辨率等等 kd_mapi_venc_init
- 注册编码完成后的回调函数 kd_mapi_venc_registercallback
- 使能H264 GOP间隔产生IDR帧 kd_mapi_venc_enable_idr
- 启动venc kd_mapi_venc_start
- venc模块绑定vi模块 kd_mapi_venc_bind_vi
- 编码完成后的回调函数,获取编码后的图像数据 get_venc_stream