K230 SDK EVB Board Demo使用指南
1. 概述
此文档介绍K230 SDK提供的demo功能,使用方法等。其中rt-smart上的可执行程序都默认编译到了小核/sharefs目录下, 测试大核程序时,需要等待小核完全启动,之后在大核的msh中进入/sharefs/app目录内测试。各测试demo用到的音视频资源文件,可到以下链接地址获取
2. Demo介绍
2.1 Display_demo
2.1.1 display_demo简介
VO(Video Output,视频输出)模块主动从内存相应位置读取视频和图形数据,并通过相应的显示设备输出视频和图形。芯片支持的显示/回写设备、视频层和图形层情况。
2.1.2 Feature说明
video ouput 包含了三个用例、一个是dsi 的自测模式、vo 和 vvi 的绑定测试、vo layer 层插入帧的测试
2.1.3 依赖资源
需要屏幕
2.1.4 使用说明
2.1.4.1 编译
软件编译参考release sdk软件包中的README.md
2.1.4.2 执行
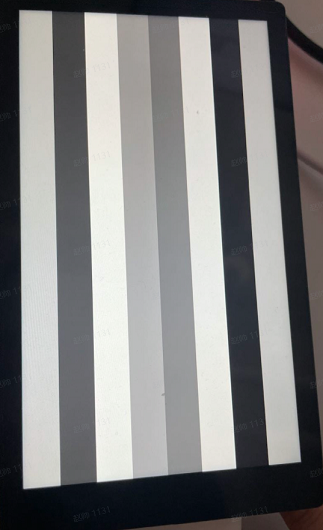
dsi 自测模式demo 运行
./sample_vo.elf 2
会在屏幕上显示color bar 的图像,具体如下:
-
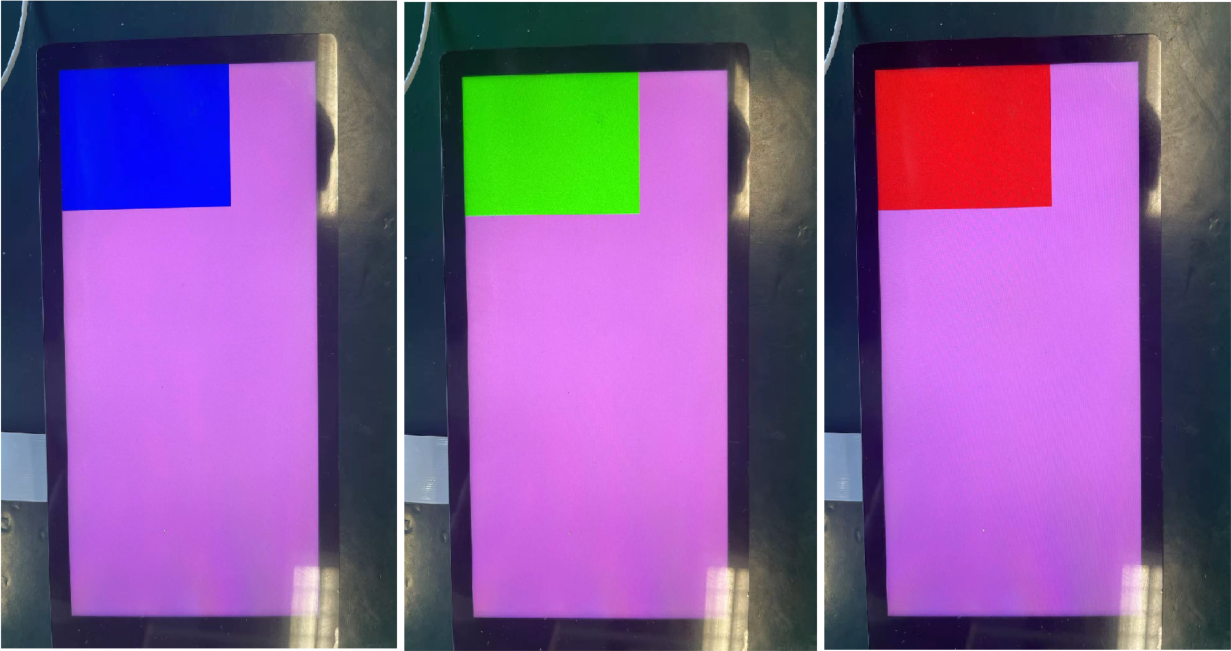
vo 和 vvi 绑定demo运行
./sample_vo.elf 9然后按一次回车vvi 开始发送argb 的数据,在按一次回车,程序退出
显示效果为红绿蓝三原色交替显示,效果如下:
-
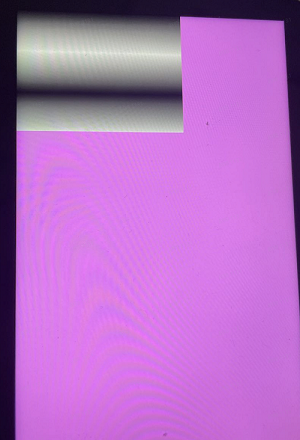
vo layer 层插入帧demo运行
./sample_vo.elf 7执行完命令后、按一次回车用户层插入一张图片、再按一次回车程序退出
显示效果如下:
2.2 Venc_demo
2.2.1 Venc_demo简介
Venc demo实现对vi接收到到图形进行编码,并且可以对输入图像进行画框和OSD叠加。支持编码协议为H.264/H.265/JPEG。编码结果可以存储成文件,导出到本地,使用视�频软件播放。
2.2.2 Feature说明
只支持1280x720分辨率。
2.2.3 依赖资源
摄像头
2.2.4 使用说明
2.2.4.1 mpp_demo执行
执行./sample_venc.elf -h后,输出demo的使用说明,如下:
Usage : ./sample_venc.elf [index] -sensor [sensor_index] -o [filename]
index:
0) H.265e.
1) JPEG encode.
2) OSD + H.264e.
3) OSD + Border + H.265e.
sensor_index: see vicap doc
sensor_index取值参看k230_docs/zh/01_software/board/mpp/K230_Camera_Sensor适配指南.md文档中关于k_vicap_sensor_type的描述,默认值为7
举例:
./sample_venc.elf 0 -sensor 7 -o out.265
2.2.4.2 MAPI编码demo
sample_venc默认使用的sensor类型是IMX335_MIPI_2LANE_RAW12_1920X1080_30FPS_LINEAR,目前该demo支持3路编码,可通过命令行传参的方式修改sensor类型以及其他参数,具体说明如下:
启动开发板后:
- 通过
lsmod检查小核侧是否加载k_ipcm模块,如未加载,执行insmod k_ipcm.ko加载k_ipcm模块 - 在大核侧启动核间通信进程,执行
./sample_sys_inif.elf - 在小核侧 /mnt 目录下,执行
./sample_venc,默认执行1路h264视频编码,分辨率为1280x720,生成的码流文件存放在 /tmp 目录下面,如需传参可参考如下参数说明:
Usage: ./sample_venc -s 0 -n 2 -o /tmp -t 0
-s or --sensor_type [sensor_index],\n");
see vicap doc
-n or --chn_num [number], 1, 2, 3
-t or --type [type_index]
0: h264 type
1: h265 type
2: jpeg type
-o or --out_path [output_path]
-h or --help, will print usage
sensor_index取值参看k230_docs/zh/01_software/board/mpp/K230_Camera_Sensor适配指南.md文档中关于k_vicap_sensor_type的描述,默认值为7
可通过ctrl+c停止运行,根据不同的编码类型,会在小核指定的输出目录下生成不同的码流文件,对于h264类型,会生成形如stream_chn0.264文件,其中 0 代表0通道;对于h265类型,会生成形如 stream_chn0.265文件,同样 0 代表0通道;对于jpeg类型,会生成形如chn0_0.jpg的jpg图片,代表0通道第0张图片,默认会生成10张jpg图片。
2.2.4.3 查看结果
输出文件可以导出到本地,用视频播放软件查看。
2.3 Nonai_2d_demo
2.3.1 Nonai_2d_demo简介
Nonai_2d demo对输入文件实现图像叠加的功能。
2.3.2 Feature说明
Nonai_2d通过读取yuv(I420格式)文件,进行图像叠加运算。
2.3.3 依赖资源
无。
2.3.4 使用说明
输入参数如下:
| 参数名 | 描述 | 默认值 |
|---|---|---|
| -i | 输入文件名 | - |
| -w | 图像宽度 | - |
| -h | 图像高度 | - |
| -o | 输出文件名 | - |
2.3.4.1 执行
举例:
./sample_nonai_2d.elf -i /sharefs/foreman_128x64_3frames.yuv -w 128 -h 64 -o /sharefs/out_2d.yuv
2.3.4.2 查看结果
输出文件可以导出到本地,用yuv播放软件查看。
2.4 Vdec_demo
2.4.1 Vdec_demo简介
Vdec demo实现视频解码的功能。解码功能支持H.264/H.265/JPEG解码。支持的输入数据格式为.264/.264/.jpeg。
2.4.2 Feature说明
Vdec demo通过读取流文件进行解码。解码输出结果通过屏幕显示。
2.4.3 依赖资源
无。
2.4.4 使用说明
2.4.4.1 执行
执行./sample_vdec.elf -help,可以看到可配置参数及说明,其默认值如下表所示:
| 参数名 | 说明 | 默认值 |
|---|---|---|
| i | 输入文件名,需要后缀名分别为.264/.265/.jpg | - |
| type | vo connector type, 参看vo 文档描述 | 0 |
其中type取值参看k230_docs/zh/01_software/board/mpp/K230_视频输出_API参考.md中关于k_connector_type的描述,设置为0
2.4.4.1.1 VDEC绑定VO解码显示
./sample_vdec.elf -i canaan.264
2.4.4.1.2 MAPI VDEC绑定VO解码显示
./sample_vdec.elf -i canaan.264
2.4.4.2 查看结果
解码结果可以在屏幕上查看。
2.5 Audio_demo
2.5.1 audio_demo简介
audio demo通过调用api接口来实现音频输入和输出功能。音频输入包括i2s和pdm模块,音频输出包括i2s模块。demo中包含了可以单独测试音频输入或音频输出用例,也包含音频输入和输出同时测试的用例。
2.5.2 Feature说明
2.5.2.1 音频输入
音频输入通过采集环境中的声音并将其保存成文件来分析是否正常。
音频输入包括i2s和pdm两个模块的测试,demo中采集15s钟的音频数据,采集到的文件格式为wav,可使用vlc直接播放。i2s 音频输入有2组,demo中默认使用第0组作为音频输入。pdm音频输入一共有4组,demo中默认使用第0组作为音频输入。
2.5.2.2 音频输出
音频输出通过播放wav文件,插上耳机听声音来判断是否正常。
音频输出只包括i2s模块测试,demo中通过播放wav来测试音频输出功能,可上传不同音频格式的wav文件来测试音频输出功能。i2s 音频输出有2组,demo中默认使用第0组作为音频输出。
2.5.2.3 音频输入输出
音频输入和输出可同时测试。
- 测试i2s模块功能,即:通过i2s音频输入实时采集环境中声音并通过i2s音频输出,接上耳机可实时听到环境中的声音。
- 测试pdm模块功能,即:通过pdm音频输入实时采集环境中声音并通过i2s音频输出,接上耳机可实时听到环境中的声音。
2.5.2.4 音频编解码
内置g711a/u 16bit 音频编解码器,用户可以注册其他外置编解码器。
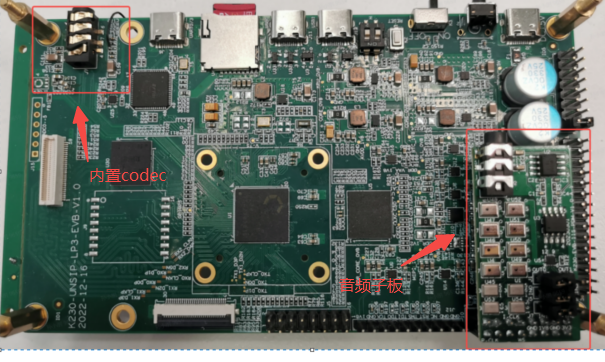
2.5.2.5 数据链路
- audio codec从模拟麦克风接收到的信号,转变为I2S格式的PCM数据后,输入到audio中的I2S中;I2S输出的PCM数据,经过audio codec后,变为模拟信号发出,该模式不使用数字IO,固定使用I2S的sdi0和sdo0接口。
- I2S的直接与片外的数字麦克风和PA连接。共有两组接口可以选择:sdi0、sdo0及sdi1、sdo1。
- 片外的PDM麦克风,输入最多8路PDM数据到audio的4个输入数据接口。
可以使用内置codec或外接设备(音频子板)来测试音频相关功能。使用内置codec可以测试一组I2S音频输入和输出及audio codec相关功能,使用音频子板可以测试2组i2s音频输入输出和4组pdm音频输入功能。
2.5.2.6 注意事项
-
内置codec最大采样精度支持24bit,32bit不支持;因此使用内置codec测试i2s音频输入输出时,只支持16/24 bit采样精度。
-
音频子板i2s收发回环测试,只支持32bit采样精度。原因如下:
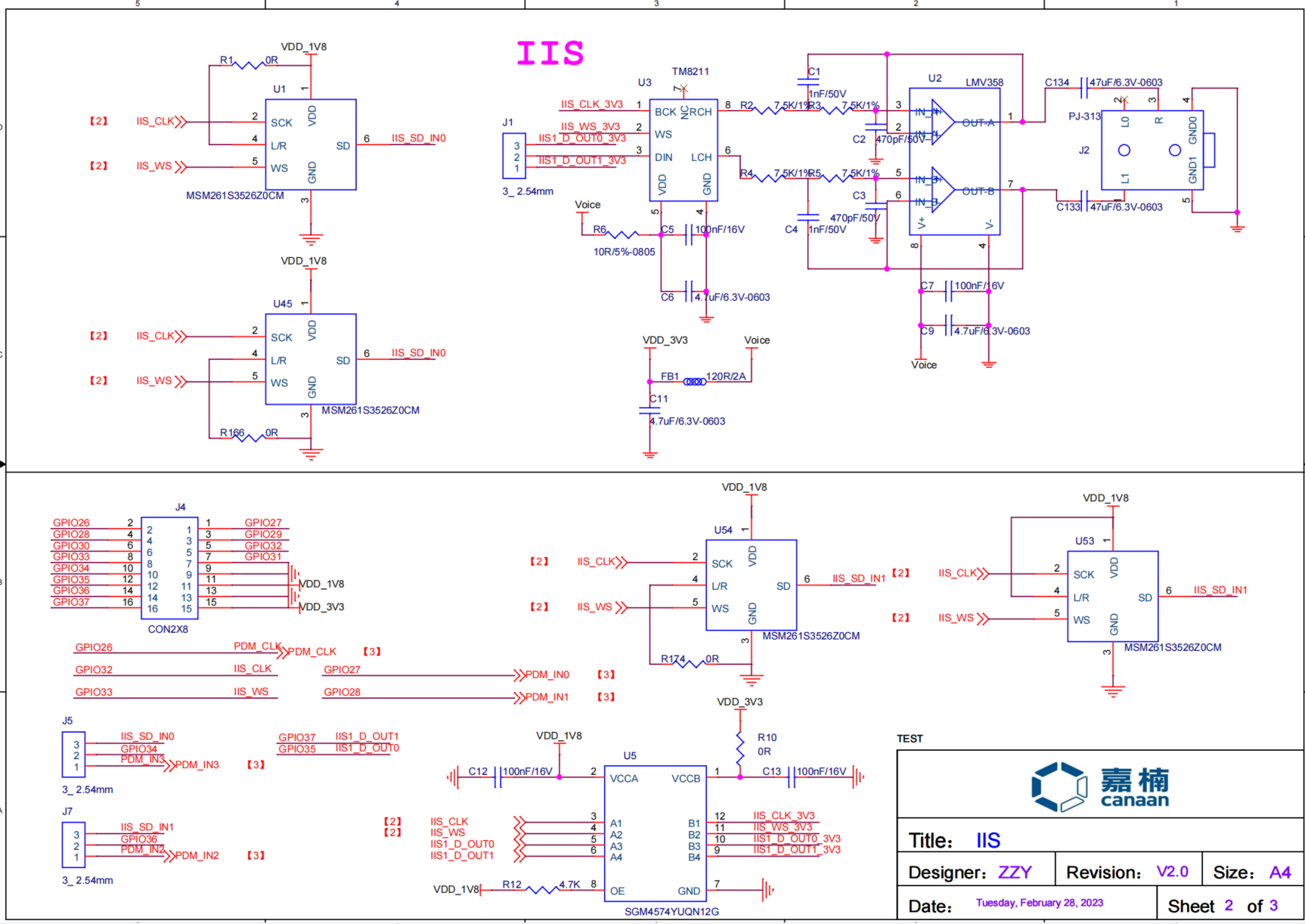
音频子板采集使用MSM261S3526Z0CM硅麦克风,为I2S Philips格式;音频子板输出使用codec tm8211,为i2s 右对齐格式,16bit采样。右因 i2s模块收发使用同一个ws,收发同时运行只能配置一种i2s 对齐格式。为正确获取音频数据,需适配MSM261S3526Z0CM硅麦克风,因此i2s收发配置为I2S Philips格式。但是此时输出为右对齐格式,所以输出数据就会损失精度。但使用32bit精度收发时,不受i2s对齐格式显示,因此无影响。
如果单独测试音频输入或者音频输出,不受采样精度影响,16/24/32bit都支持。
-
使用音频子板采集音频时,采样率支持范围(8k~48k).
音频子板采集模块使用MSM261S3526Z0CM硅麦克风,最大时钟为4MHZ。当采样率为96k(6.144MHZ)和192k(12.288MHZ)时,从音频子板上采集到的声音会异常。
2.5.3 依赖资源
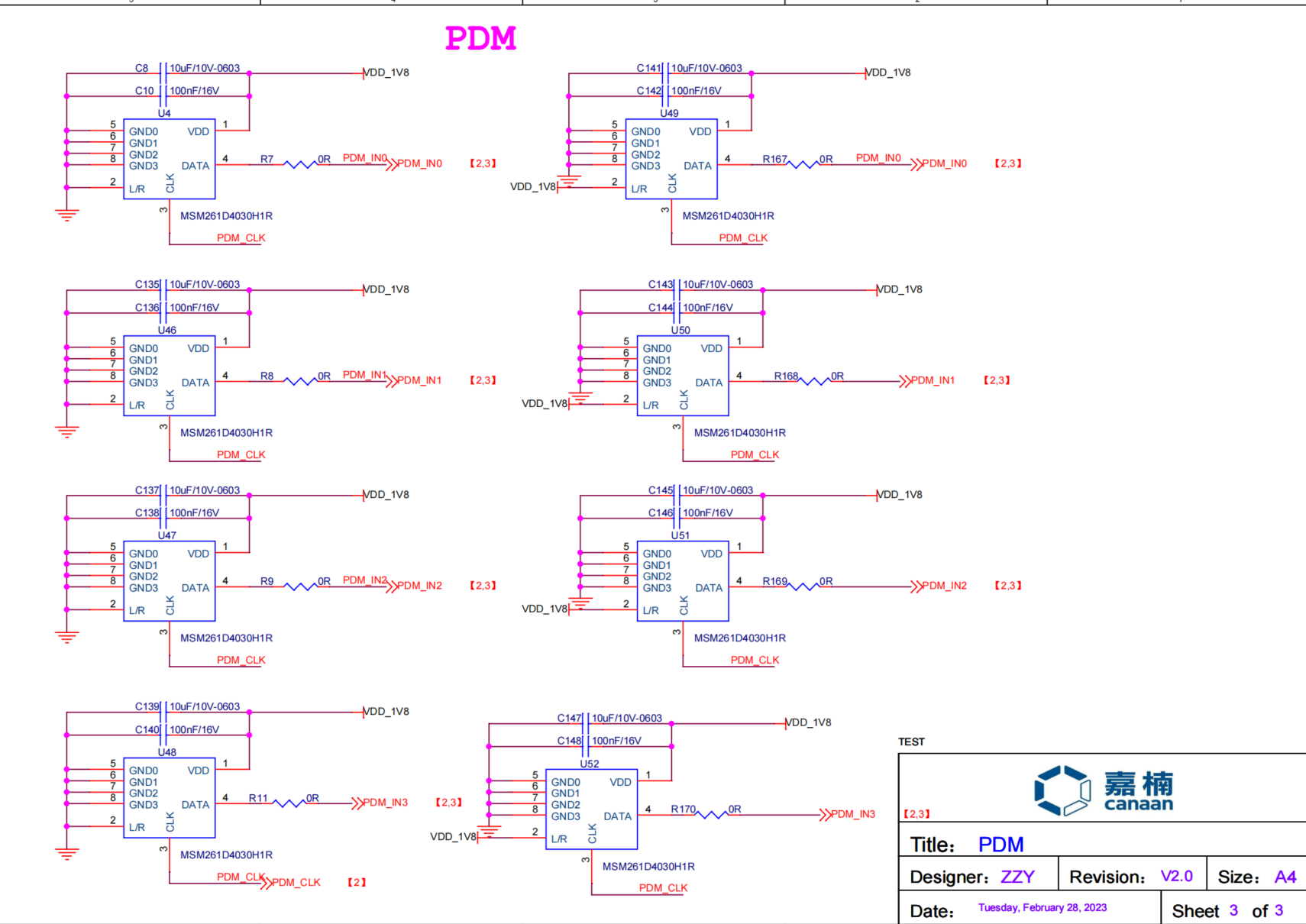
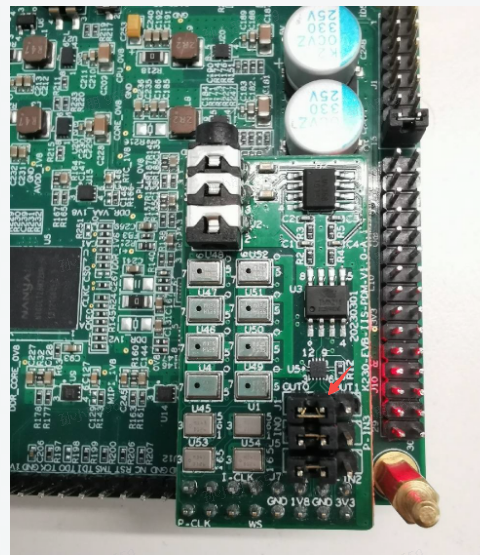
- 音频测试依赖音频子板。
音频子板原理图如下:
当测试i2s输入输出时,音频子板可通过跳线帽如下连接:
pdm音频采集,当采集第0组pdm通道或第1组pdm通道数据时,使用引脚与i2s引脚没有冲突。
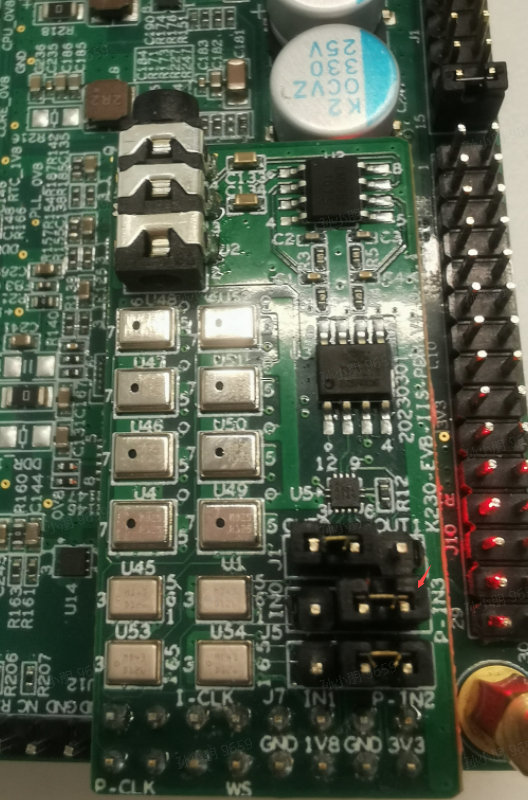
当使用第2组和第3组pdm通道时,需要使用跳线帽切换到pdm通道模式,具体如下:
2.5.4 使用说明
2.5.4.1 编译
- 软件编译环境参考SDK中的
README.md。 - 搭建好sharefs环境,读写文件均依赖sharefs。
2.5.4.2 执行
进入rt-smart系统后,进入/sharefs目录下,sample_audio.elf为测试demo。
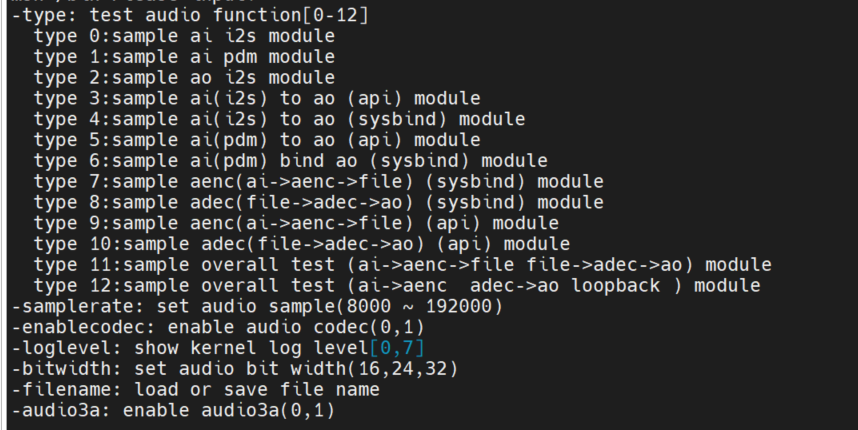
- 可输入
./sample_audio.elf -help查看demo使用方法。 -type选项来测试不同模块功能;-samplerate选项来配置音频输入和输出不同采样率(8k-192k),默认为44.1k;-enablecodec使用内置codec或者片外的音频子板;-loglevel打印内核日志等级;-bitwidth设置音频采样精度(16/24/32);-filename加载或存储wav/g711文件名称。
2.5.4.2.1 I2S音频输入测试
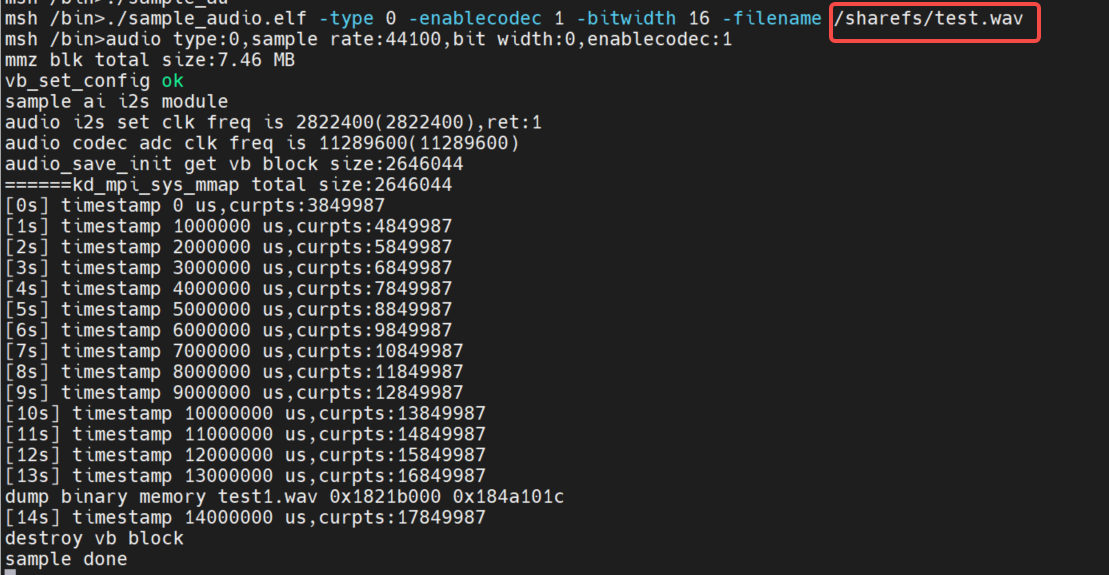
- 输入
./sample_audio.elf -type 0来采集15s中的pcm音频数据, -samplerate选项来选择采集不同采样率的音频,-bitwidth来来设置不同的采样精度,-enablecodec设置是否使用内置codec,-filename保存数据到文件。采集15s数据后,demo自动退出。
demo实现思路:该测试通过循环调用api函数:kd_mpi_ai_get_frame和kd_mpi_ai_release_frame来采集数据。注意i2s对应的ai dev号为0。
2.5.4.2.2 pdm音频输入测试
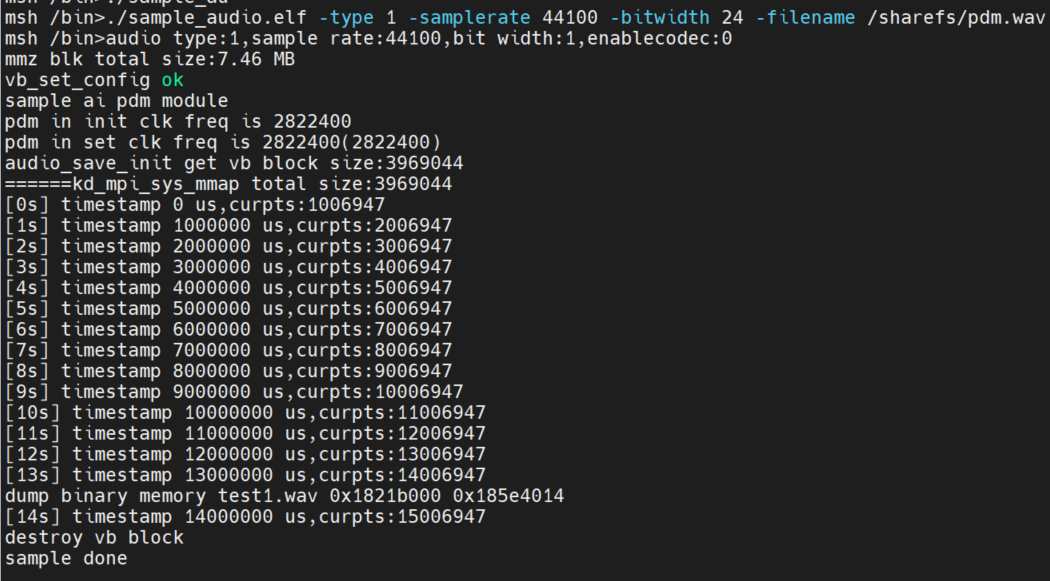
- 输入
./sample_audio.elf -type 1来采集15s中的pcm音频数据 -samplerate选项来选择采集不同采样率的音频-bitwidth来来设置不同的采样精度-enablecodec设置是否使用内置codec。采集15s数据后,demo自动退出,并保存数据到文件中。
demo实现思路:该测试通过循环调用api函数:kd_mpi_ai_get_frame和kd_mpi_ai_release_frame来采集数据。注意pdm对应的ai dev号为1.
2.5.4.2.3 I2S音频输出测试
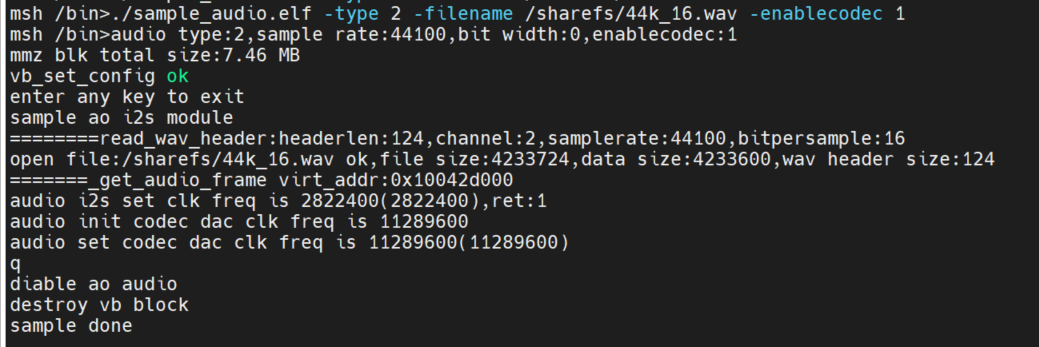
支持播放wav文件,需将wav文件拷贝到sharefs路径下。该demo会循环播放wav文件(其他任意wav文件也可),用户可以按任意键来退出该功能测试。
demo实现思路:该测试通过循环调用api函数:kd_mpi_ao_send_frame来实时输出声音。
2.5.4.2.4 I2S音频输入输出api接口测试
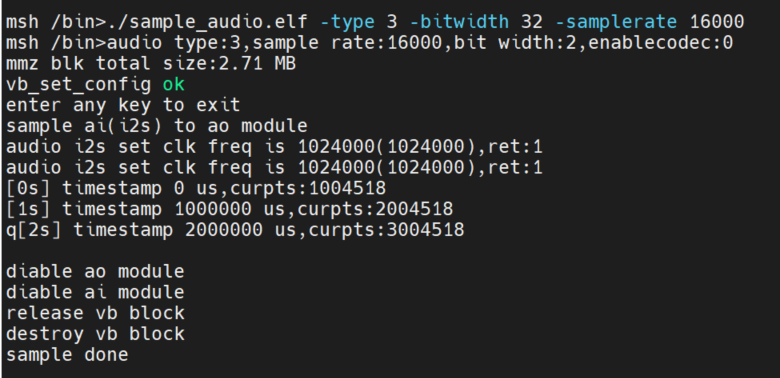
输入./sample_audio.elf -type 3 -bitwidth 32,通过api接口实时测试音频输入输出功能。
通过调用api接口:kd_mpi_ai_get_frame获取音频数据并调用kd_mpi_ao_send_frame输出音频数据来测试音频输入和输出整体功能。用户可以按任意键来退出该功能测试。测试过程中会实时输出ai采集到的时间戳信息。
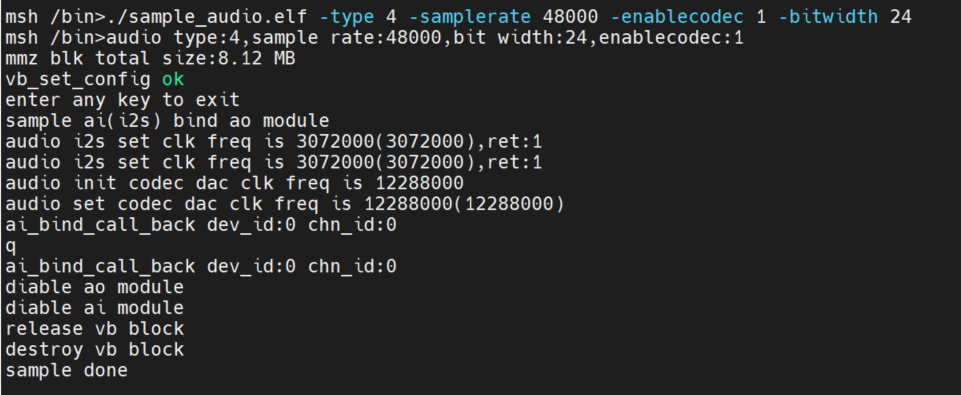
2.5.4.2.5 I2S音频输入和输出模块的系统绑定测试
输入./sample_audio.elf -type 4,通过ai和ao模块绑定实时测试音频输入输出功能。
通过调用系统绑定api接口:kd_mpi_sys_bind将ai�和ao模块绑定,来测试音频输入和输出整体功能。用户可以按任意键来退出该功能测试。
2.5.4.2.6 pdm音频输入,i2s输出api接口测试
输入./sample_audio.elf -type 5 -bitwidth 32,通过api接口实时测试音频输入输出功能。
通过调用api接口:kd_mpi_ai_get_frame获取音频数据并调用kd_mpi_ao_send_frame输出音频数据来测试音频输入和输出整体功能。用户可以按任意键来退出该功能测试。测试过程中会实时输出ai采集到的时间戳信息。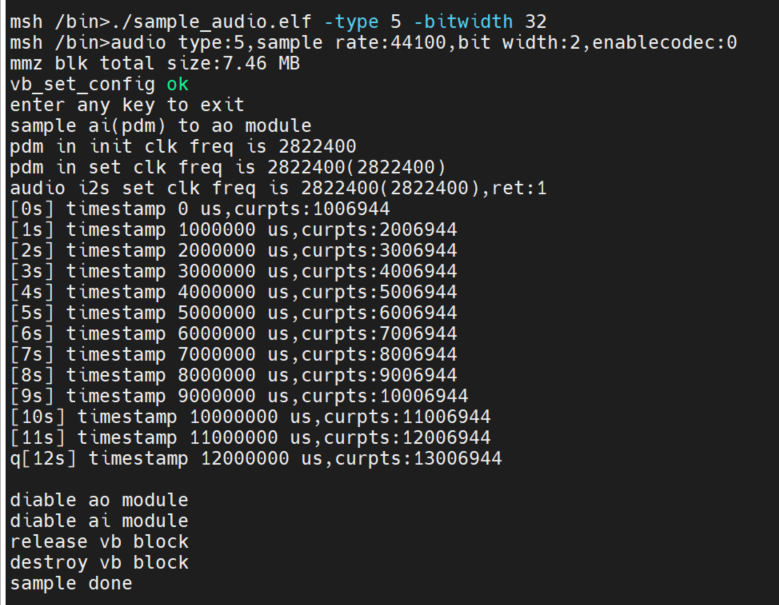
2.5.4.2.7 pdm音频输入,i2s输出系统绑定测试
输入./sample_audio.elf -type 6 -bitwidth 32,通过ai和ao模块绑定实时测试音频输入输出功能。
通过调用系统绑定api接口:kd_mpi_sys_bind将ai和ao模块绑定,来测试音频输入和输出整体功能。用户可以按任意键来退出该功能测试。
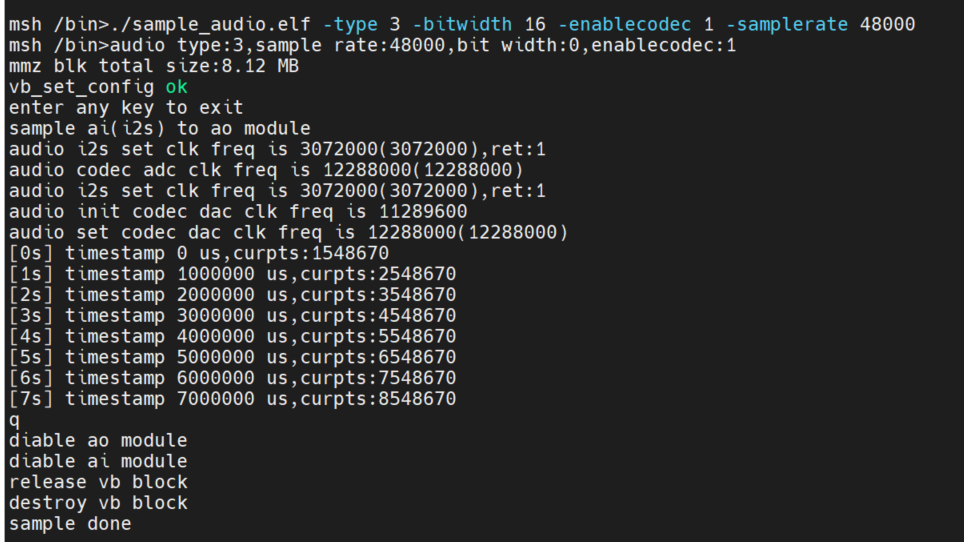
2.5.4.2.8 编码测试
获取ai数据并编码保存到文件。编解码只支持g711a/u,16bit。
系统绑定方式:./sample_audio.elf -type 7 -bitwidth 16 -enablecodec 1 -filename /sharefs/i2s_codec.g711a
api接口方式:./sample_audio.elf -type 9 -bitwidth 16 -enablecodec 1 -filename /sharefs/i2s_codec.g711a
2.5.4.2.9 解码测试
读取文件数据并解码播放。编解码只支持g711a/u,16bit。
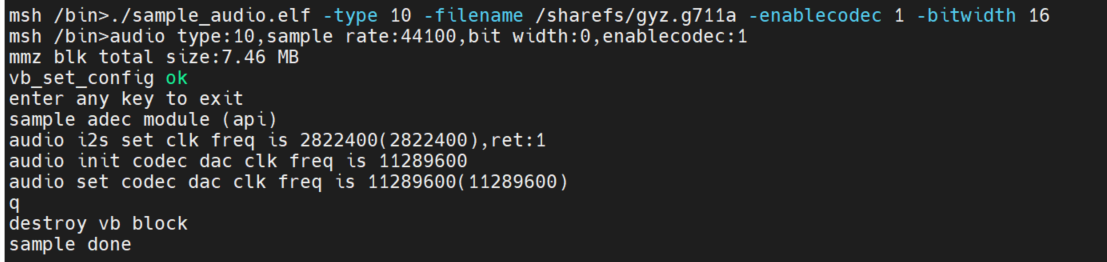
系统绑定方式:./sample_audio.elf -type 8 -filename /sharefs/gyz.g711a -enablecodec 1 -bitwidth 16
api接口方式:./sample_audio.elf -type 10 -filename /sharefs/gyz.g711a -enablecodec 1 -bitwidth 16
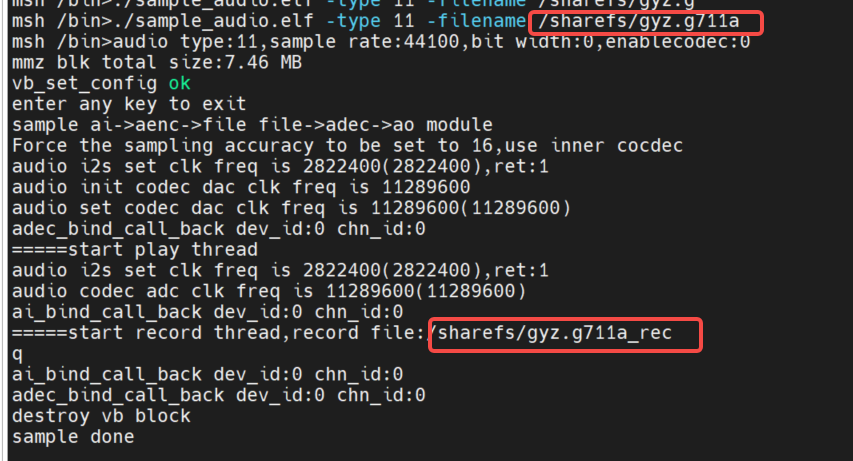
2.5.4.2.10 音频全流程测试
1)录制模块ai->aenc->file 和播放模块 file->adec->ao 两条链路同时运行,模拟语音对讲的场景。使用内置codec,16bit精度来模拟。-filename来选择待播放的文件,为g711a格式,-samplerate选择采样精度。录制文件名称:为播放文件名称后+_rec:如-filename为/sharefs/test.g711a,则录制文件名为:/sharefs/test.g711a_rec.
2)ai->aenc ,adec->ao两条链路绑定回环测试。使用内置codec,16bit精度来模拟。
同时测试g711编码后的stream 时间戳。
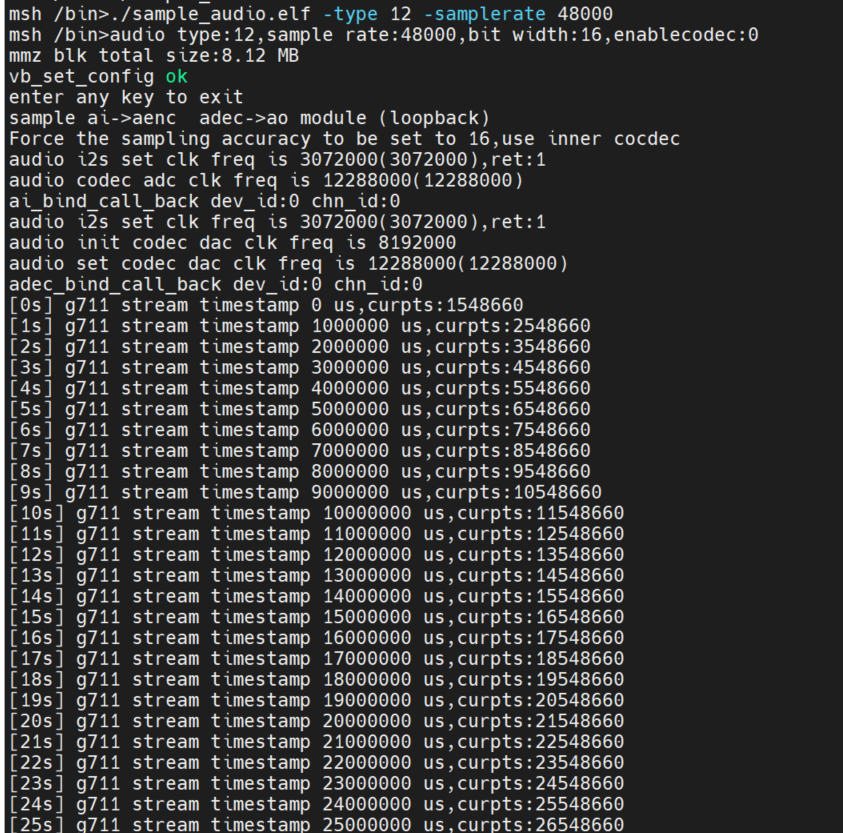
输入cat /proc/umap/sysbind 可查看模块间系统绑定。

2.5.4.2.11 mapi音频测试
确保大核已启动核间通信进程:大核上执行:/bin/sample_sys_init.elf & 确保小核加载核间通信驱动模块:insmod /mnt/k_ipcm.ko
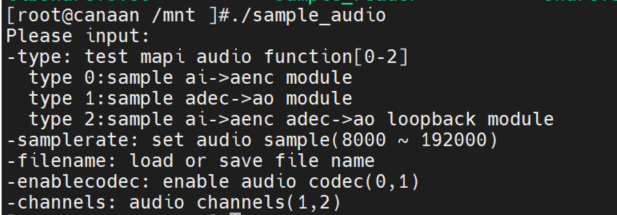
- 可输入
/mnt/sample_audio -help查看demo使用方法。 -type选项来测试不同模块功能。-samplerate选项来配置音频输入和输出不同采样率(8k-192k),默认为44.1k。-enablecodec使用内置codec或者片外的音频子板,默认使用内置codec。-filename加载或存储g711文件名称。-channels:指定声道数。8
- ai->aenc测试
小核上执行命令:/mnt/sample_audio -type 0 -filename test.g711a,按q键可退出测试。demo能够实时采集音频数据并编码成g711a格式并保存到文件中。 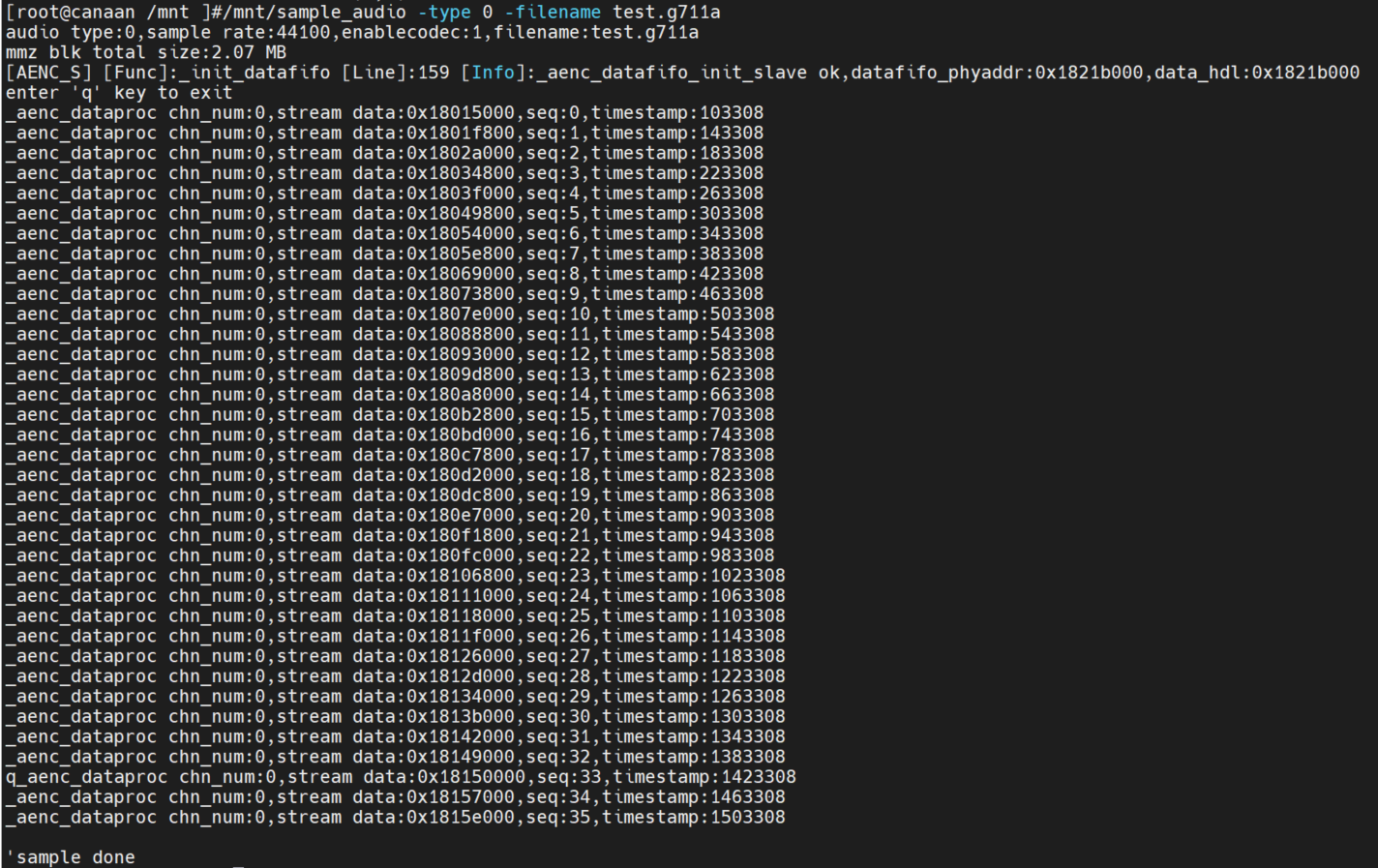
- adec->ao测试
小核上执行命令:/mnt/sample_audio -type 1 -filename tes.g711a,按q键可退出测试。demo能够循环解码播放本地g711a格式的文件。 
- ai->aenc adec->ao loopback测试
小核上执行命令:/mnt/sample_audio -type 2 ,按q键可退出测试。demo能够实时采集音频数据并编码成g711a格式,再解码g711a格式数据后播放输出。 
2.6 Vicap_demo
2.6.1 vicap_demo简介
vicap demo通过调用mpi接口实现摄像头数据采集预览功能。
2.6.2 Feature说明
当前版本支持OV9732和OV9286、imx335 三个摄像头模组图像采集预览,支持单个摄像头最多输出三路数据流,最多支持3路摄像头数据输入。
2.6.3 依赖资源
摄像头模组
2.6.4 使用说明
2.6.4.1 编译
软件编译环境参考SDK中的README.md。
- 在k230_sdk目录下执行
make mpp-clean && rt-smart && make build-image,将大核的修改编译进sd卡镜像中,会在k230_sdk/output/k230_evb_defconfig/images/目录下生成镜像文件sysimage-sdcard.img。
2.6.4.2 执行
- 将
src/big/mpp/userapps/sample/elf/sample_vicap.elf文件拷贝至本地指定的目录 - 将该目录通过nfs挂载至小核Linux的
/sharefs - 在大核端,通过
cd /sharefs命令进入/sharefs - 在该目录下执行
./sample_vicap命令获取命令帮助信息
当输入:sample_vicap命令后打印如下提示信息:
usage: ./sample_vicap -mode 0 -dev 0 -sensor 0 -chn 0 -chn 1 -ow 640 -oh 480 -preview 1 -rotation 1
Options:
-mode: vicap work mode[0: online mode, 1: offline mode. only offline mode support multiple sensor input] default 0
-dev: vicap device id[0,1,2] default 0
-dw: enable dewarp[0,1] default 0
-sensor: sensor type[0: ov9732@1280x720, 1: ov9286_ir@1280x720], 2: ov9286_speckle@1280x720]
-ae: ae status[0: disable AE, 1: enable AE] default enable
-awb: awb status[0: disable AWB, 1: enable AWb] default enable
-chn: vicap output channel id[0,1,2] default 0
-ow: the output image width, default same with input width
-oh: the output image height, default same with input height
-ox: the output image start position of x
-oy: the output image start position of y
-crop: crop enable[0: disable, 1: enable]
-ofmt: the output pixel format[0: yuv, 1: rgb888, 2: rgb888p, 3: raw], only channel 0 support raw data, default yuv
-preview: the output preview enable[0: disable, 1: enable], only support 2 output channel preview
-rotation: display rotaion[0: degree 0, 1: degree 90, 2: degree 270, 3: degree 180, 4: unsupport rotaion]
-help: print this help
参数说明如下:
| 参数名称 | 可选参数值 | 参数说明 |
|---|---|---|
| -dev | 0:vicap设备0 1:vicap设备1 2:vicap设备2. | 指定当前使用的vicap设备,系统最多支持三个vicap设备。通过指定设备号实现sensor与不同vicap设备之间的绑定关系。 例如: -dev 1 -sensor 0即表示将ov9732 1280x720 RGB图像输出绑定到vicap设备1. |
| -mode | 0:在线模式;1:离线模式 | 指定vicap设备工作模式,当前之前在线模式和离线模式。对于多个sensor输入,必须指定为离线模式。 |
| -sensor | 0: ov9732@1280x720, 1: ov9286_ir@1280x720, 2: ov9286_speckle@1280x720, 3: imx335_2lan@1920x1080, 4:imx335_2lan@2592x1944, 5: imx335_4lan@2592x1944 | 指定当前使用的sensor类型,当前系统支持三种类型图像输出:ov9732 1280x720 RGB图像输出,ov9286 1280x720红外图像输出,ov9286 1280x720散斑图像输出。 imx335 输出的是rgb 的图像 |
| -chn | 0:vicap设备输出通道0 1:vicap设备输出通道1 2:vicap设备输出通道2. | 指定当前使用的vicap设备的输出通道,一个vicap设备最多支持三路输出,仅通道0支持RAW图像格式输出 |
| -ow | 指定输出图像宽度,默认为输入图像宽度。宽度需要16字节对齐。 如果默认宽度超过显示屏输出最大宽度,则使用显示输出宽度作为图像最终输出宽度 如果输出宽度小于输入图像宽度,且未指定ox或者oy参数,则默认为缩放输出 | |
| -oh | 指定输出图像高度,默认为输入图像高度。 如果默认高度超过显示屏输出最大高度,则使用显示输出高度作为图像最终输出高度 如果输出高度小于输入图像高度,且未指定ox或者oy参数,则默认为缩放输出 | |
| -ox | 指定图像输出水平起始位置,该参数大于0将执行输出裁剪操作 | |
| -oy | 指定图像输出垂直起始位置,该参数大于0将执行输出裁剪操作 | |
| -crop | 0:禁用裁剪功能 1:使能裁剪功能 | 当输出图像尺寸小于输入图像尺寸时,默认未缩放输出,如果指定了该标志,则为裁剪输出 |
| -ofmt | 0:yuv格式输出 1:rgb格式输出 2:raw格式输出 | 指定输出图像格式,默认为yuv输出。 |
| -preview | 0:禁用预览显示 1:使能预览显示 | 指定输出图像预览显示功能。默认为使能。当前最多支持2路输出图像同时预览。 |
| -rotation | 0:旋转0度 1:旋转90度 2:旋转180度 3:旋转270度 4:不支持旋转 | 指定预览显示窗口旋转角度。默认仅第一路输出图像窗口支持旋转功能。 |
示例1:
./sample_vicap -dev 0 -sensor 0 -chn 0 -chn 1 -ow 640 -oh 480
说明:将ov9732@1280x720 RGB 绑定到vicap设备0,并使能vicap设备输出通道0和通道1,其中通道0输出大小默认为输入图像大小(1280x720),通道1输出图像大小为640x480
示例2:
./sample_vicap.elf -mode 1 -dev 0 -sensor 0 -chn 0 -ow 1080 -oh 720 -dev 1 -sensor 1 -chn 0 -ow 1080 -oh 720 -dev 2 -sensor 2 -chn 0 -ow 1080 -oh 720 -preview 0
说明:三路输入输出。将ov9732@1280x720 RGB 绑定到vicap设备0,并设置通道0输出大小为1080x720的图像;将ov9286@1280x720 红外绑定到vicap设备1,并设置通道0输出大小为1080x720的图像;将ov9286@1280x720 散斑绑定��到vicap设备2,并设置通道0输出大小为1080x720的图像(无预览);
2.7 DMA_demo
2.7.1 DMA_demo简介
2.7.1.1 非绑定模式
dma 通道 0-3 是 gdma,4-7 是 sdma。
- 通道 0 连续输入分辨率为 1920x1080 的图像,8bit,YUV400,单通道模式,旋转 90 度后输出,和 golden 数据比对
- 通道 1 连续输入分辨率为 1280x720 的图像,8bit,YUV420,双通道模式,旋转180 度后输出,和 golden 数据比对
- 通道 2 连续输入分辨率为 1280x720 的图像,10bit,YUV420,三通道模式,x-mirror,y-mirror 后输出,和 golden 数据比对
- 通道 4 为 1d 模式循环传输一段数据,传输完成后和 golden 数据比对
- 通道 5 为 2d 模式循环传输一段数据,传输完成后和 golden 数据比对
2.7.1.2 绑定模式
使用 vvi 作为 dma 模拟输入,vvi 设备 0 的通道 0 绑定 dma 的通道 0,vvi 设备 0 的通道 1 绑定 dma 的通道 1。vvi 每隔一秒,向通道 0 输入 640x320,YUV400,8bit,旋转 90° 的图像,向通道 1 输入 640x320,YUV400,8bit,旋转 180° 的图像。
2.7.2 Feature说明
包括 dma 设备属性配置,通道属性配置,图形输入、输出、释放,pipeline 绑定等功能。
2.7.3 依赖资源
无
2.7.4 使用说明
2.7.4.1 编译
软件编译参考 release sdk 软件包中的 README.md。
2.7.4.2 执行
- 非绑定模式 demo 运行
/bin/sample_dma.elf
会有测试信息在屏幕上显示出来,输入 q 结束运行。
- 绑定模式 demo 运行
/bin/sample_dma_bind.elf
会有测试信息在屏幕上显示出来,输入 q 结束运行。
2.8 DPU_demo
2.8.1 dpu_demo简介
2.8.1.1 非绑定模式
从配置文件解析参数并配置 dpu 的设备属性和通道属性,从指定路径读取并配置参考图和模板图,循环输入红外图和散斑图,获取结果并检测计算是否正确。
2.8.1.2 绑定模式
从配置文件解析参数并配置 dpu 的设备属性和通道属性,从指定路径读取并配置参考图和模板图,以 vvi 作为模拟前级进行 pipeline 绑定,输入红外图和散斑图,dpu 计算结果,用户态获取结果并把深度图以文件的形式保存下来(可以使用相应软件打开深度图),按 q 退出程序。
2.8.2 Feature说明
包括配置文件解析,设备和通道的属性配置,设备和通道的启动暂停,用户态输入数据、输出结果、释放结果,pipeline 绑定的输入输出。
2.8.3 依赖资源
无
2.8.4 使用说明
2.8.4.1 编译
软件编译环境参考SDK中的README.md。由于本模块需要依赖文件,在编译时需要执行以下步骤:
2.8.4.2 执行
-
demo 所需的配置文件和输入输出的 golden 数据存放在
k230_sdk/test_resource/dpu目录下,为了方便使用可以将整个dpu文件夹拷贝到/sharefs/目录下(关于sharefs的使用请参考对应文档),拷贝完之后在大核中会存在/sharefs/dpu/目录。 -
将
k230_sdk/src/big/mpp/userapps/sample/elf/sample_dpu.elf拷贝到/sharefs/目录下。 -
非绑定模式 demo 运行
/sharefs/sample_dpu.elf /sharefs/dpu/会有测试信息在屏幕上显示出来,运行 10 帧后结束。上面的命令中,参数
/sharefs/dpu/可以根据用户配置文件实际存放的路径来设置。 -
绑定模式 demo 运行
/sharefs/sample_dpu.elf /sharefs/dpu/ BOUND会有测试信息在屏幕上显示出来,输入 q 结束运行。上面的命令中,参数
/sharefs/dpu/可以根据用户配置文件实际存放的路径来设置。
2.9 UVC_demo
2.9.1 uvc_demo简介
uvc demo把K230开发板当作一个USB摄像头,USB线连接到PC,PC的播放器可以播放真实摄像头的图像。
2.9.2 Feature说明
当前版本支持bulk传输与ISO传输。
当前版本只支持640x480 NV12格式图像 1280x720 H264/MJPEG格式图像。
支持PID、VID以及设备名称通过修改shell脚本配置。
2.9.3 依赖资源
摄像头模组,OV9732/IMX335摄像头。
type c线连接USB0与PC
PC的相机应用或安装PotPlayer软件
2.9.4 使用说明
2.9.4.1 编译
软件编译环境参考SDK中的README.md。
- 小核用户程序源码位于
cdk/user/mapi/sample/camera - 小核驱动程序位于
linux/drivers/usb/dwc2 - 小核驱动程序位于
linux/drivers/usb/gadget - 大核程序涉及到mpp仓库以及cdk
大核rtt实现摄像头驱动功能。
小核linux实现USB驱动功能,通过mapi从大核获取摄像头图像。
2.9.4.2 执行
进入大核rt-smart系统后,进入/bin目录下,执行
msh /sharefs/app>./sample_sys_init.elf
进入小核linux系统后,进入/mnt目录下,执行
./canaan-camera.sh start otg0
./camera -t 7
typec USB线连接USB0与PC,potplayer播放器播放摄像头。
默认使用BULK传输,使用以下命令可以更改为ISO传输。
./canaan-camera.sh stop
./canaan-camera.sh start otg0 iso
./camera -i -t 7
-t 选项用于指定vicap sensor 类型,请参考k230_docs/zh/01_software/board/mpp/K230_Camera_Sensor适配指南.md文档中关于k_vicap_sensor_type的描述,默认值为7。
进入PotPlayer -> 选项 -> 设备 -> 摄像头 界面, 视频录制设备->设备,选择UVC Camera 视频录制设备-> 格式,选择H264 1280*720 30(P 16:9)或MJPG 1280*720 30(P 16:9)或NV12 640*360p 30(P 16:9)
PotPlayer -> 打开 -> 摄像头/其他设备
2.10 USB_demo
2.10.1 USB_demo简介
USB demo目前调试了4个功能,
由于K230的升级功能只能使用USB0,所以把USB0作为device,模拟U盘,模拟鼠标键盘。跳线帽不能连接J5的pin1/pin2,作为device不能使能5V供电。
作为host,连接U盘,连接鼠标键盘。需要使用跳线帽连接J5的pin3/pin4,使能5V供电。
2.10.2 Feature说明
USB demo的功能是linux系统原始集成的功能。
2.10.3 依赖资源
typeC线,typeC转typeA。
2.10.4 使用说明
2.10.4.1 作为device模拟U盘
#规划一块内存空间作为模拟U盘的磁盘空间。
[root@canaan / ]#gadget-storage-mem.sh
2+0 records in
2+0 records out
mkfs.fat 4.1 (2017-01-24)
[ 1218.882053] Mass Storage Function, version: 2009/09/11
[ 1218.887308] LUN: removable file: (no medium)
[ 1218.895464] dwc2 91500000.usb-otg: bound driver configfs-gadget
[root@canaan / ]#[ 1219.019554] dwc2 91500000.usb-otg: new device is high-speed
[ 1219.056629] dwc2 91500000.usb-otg: new address 5
##使用SD/eMMC的FAT分区当作模拟U盘的磁盘空间。
[root@canaan ~ ]#gadget-storage.sh
[ 359.995510] Mass Storage Function, version: 2009/09/11
[ 360.000762] LUN: removable file: (no medium)
[ 360.013138] dwc2 91500000.usb-otg: bound driver configfs-gadget
[root@canaan ~ ]#[ 360.136809] dwc2 91500000.usb-otg: new device is high-speed
[ 360.173543] dwc2 91500000.usb-otg: new address 43
连接开发板的USB0,typeC连接PC,PC上显示U盘连接。
2.10.4.2 作为HOST连接U盘
K230开发板USB1通过typeC转typeA连接U盘。
2.10.4.3 作为device模拟鼠标键盘
K230开发板USB0通过typeC连接另外一台电脑设备来进行测试
[root@canaan / ]#gadget-hid.sh
[root@canaan / ]#hid_gadget_test /dev/hidg0 mouse
#根据提示输入相应的操作,比如-123 -123,可以看到PC上的鼠标指针移动。
[root@canaan / ]#hid_gadget_test /dev/hidg1 keyboard
#根据提示输入相应的操作,可以看到PC上的类似键盘输入。比如a b c --return
2.10.4.4 作为HOST连接鼠标键盘
K230开发板USB1通过typeC转typeA连接鼠标或键盘。
#通过以下命令确定input设备对应的event。K230开发板如果没有连接屏幕,连接鼠标键盘对应的event会改变。
[root@canaan ~ ]#cat /proc/bus/input/devices
...
I: Bus=0003 Vendor=046d Product=c52f Version=0111
N: Name="Logitech USB Receiver"
P: Phys=usb-91500000.usb-otg-1/input0
S: Sysfs=/devices/platform/soc/91500000.usb-otg/usb1/1-1/1-1:1.0/0003:046D:C52F.0001/input/input2
U: Uniq=
H: Handlers=event2
B: PROP=0
B: EV=17
B: KEY=ffff0000 0 0 0 0
B: REL=1943
B: MSC=10
[root@canaan / ]$ test_mouse /dev/input/event2
#点击或移动鼠标,串口会有对应的显示。
[root@canaan / ]$ test_keyboard /dev/input/event2
#按下键盘不同的按键,串口会有对应的显示。
2.11 GPU_demo
2.11.1 GPU_demo简介
GPU demo共包含三个可执行程序
tiger:绘制老虎的矢量图示例linearGrad: 绘制线性渐变示例imgIndex: 绘制颜色查找表示例
2.11.2 Feature说明
GPU demo主要覆盖GPU的矢量绘制、线性渐变(通过pattern实现)、颜色查找表三个功能。
2.11.3 依赖资源
文件系统可写。
2.11.4 使用说明
进入一个可写的目录,执行程序
2.11.4.1 tiger
运行tiger命令,执行完成后在当前目录下生成tiger.png,如下图所示

2.11.4.2 linearGrad
运行linearGrad命令,执行完成后在当前目录生成linearGrad.png,如下图所示
2.11.4.3 imgIndex
运行imgIndex命令,执行完成后在当前目录生成4个图片文件,如下图所示
imgIndex1.png: index1模式,支持2种颜色
imgIndex2.png: index2模式,支持4种颜色

imgIndex4.png: index4模式,支持16种颜色

imgIndex8.png: index8模式,支持256种颜色
2.11.4.4 vglite_drm
运行vglite_drm命令,会在LCD屏幕上显示由GPU绘制的图案,再按一次Enter键显示下一个图案,如图所示
2.11.4.5 vglite_cube
运行vglite_cube命令,会在LCD屏幕上显示由GPU绘制的旋转的正方体,如下图所示
这个demo运行时内核会有大量的打印消息,如果不希望显示这些消息可以降低内核打印级别
sysctl -w kernel.printk=6
2.12 DRM显示demo
2.12.1 demo使用简介
该demo运行在K230小核的Linux系统上,具体是将图片显示到屏幕上。
2.12.2 Features说明
- DRM支持5个图层操作,具体包括:1个video层和4个OSD层;
- video层支持NV12、NV21、NV16、NV61颜色空间
- OSD层支持ARGB8888、ARGB4444、RGB888、RGB565颜色空间
2.12.3 依赖资源
LCD屏幕
2.12.4 使用说明
2.12.4.1 编译
软件编译参考release sdk软件包中的README.md
2.12.4.2 执行
modetest -M canaan-drm -D 0 -a -s 38@36:1080x1920-30 -P 31@36:1080x1920@NV12 -v -F smpte
执行完上述命令,会在LCD屏幕上显示彩条,具体如下所示:
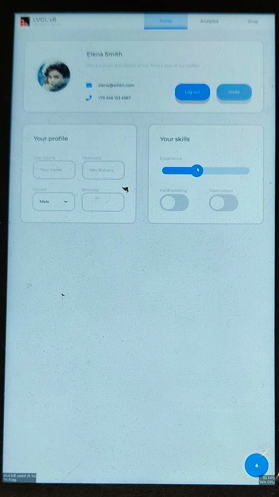
2.13 LVGL demo
2.13.1 demo使用简介
该demo运行在K230小核的Linux系统上,会在屏幕上显示一个配置界面,该界面支持触摸操作。
2.13.3 依赖资源
LCD屏幕
2.13.2 Features说明
- 支持按钮、滑动条功能
- 支持触摸功能
2.13.4 使用说明
2.13.4.1 编译
软件编译参考release sdk软件包中的README.md
2.13.4.2 执行
lvgl_demo_widgets
执行完上述命令,会在LCD屏幕上显示配置界面,可以通过触摸屏进行相关配置,具体如下所示:
2.14 Rtsp推流Demo
2.14.1 Demo简介
该demo实现rtsp推流。
2.14.2 Feature说明
该demo支持音视频码流同时推流到rtsp server上,其中通过mapi venc&aenc接口实现对音视频的编码;推流之后通过url进行拉取,目前该demo支持3路url推拉流。
2.14.3 依赖资源
需要usb转eth网口转换器,将开发板连接网线
2.14.4 使用说明
2.14.4.1 编译
参考release sdk软件包中的README.md中介绍,在docker环境编译cdk-user即可,编译完成后在k230_sdk/src/common/cdk/user/out/little下生成可执行程序rtsp_demo
2.14.4.2 执行
rtsp_demo默认使用的sensor类型是IMX335_MIPI_2LANE_RAW12_1920X1080_30FPS_LINEAR,可通过命令行传参的方式修改sensor类型以及其他参数,具体说明如下:
启动开发板后:
- 通过
lsmod检查小核侧是否加载k_ipcm模块,如未加载,执行insmod k_ipcm.ko加载k_ipcm模块 - 在大核侧启动核间通信进程,执行
/sharefs/app/sample_sys_init.elf - 在小核侧/mnt目录下,执行
./rtsp_demo,默认为1路h265视频编码推流,分辨率为1280x720,如需传参参看如下参数说明,当推流mjpeg码流时,分辨率目前最大支持2032x1944,最小分辨率为640x480.
Usage: ./rtsp_demo -s 0 -n 2 -t h265 -w 1280 -h 720 -a 0
-s: the sensor type:
see vicap doc
-n: the session number, range: 1, 2,3
-t: the video encoder type: h264/h265/mjpeg
-w: the video encoder width
-h: the video encoder height
-a: audio input type(0:mic input 1:headphone input):default 0.
其中sensor类型取值查看k230_docs/zh/01_software/board/mpp/K230_Camera_Sensor适配指南.md文档中关于k_vicap_sensor_type的描述 音频输入类型可选择:板载mic或者耳机输入。
小核上正常运行rtsp_demo后,会打印出形如:rtsp://ip:8554/session0 的url地址,其中 0 代表第0路,可通过vlc拉取url的流进行播放;如需停止运行,请先停止vlc拉流,然后执行ctrl+c停止运行 rtsp_demo。
2.15 FaceAeDemo
2.15.1 Demo介绍
该demo在大核使用,是VICAP、KPU、VO(视频输出)、AERoi联调的demo,可通过人脸检测的接口适当调节人脸曝光亮度。
2.15.2 编译
- 首先参考release sdk软件包中的README.md,使用docker编译镜像。
- 编译完成后,默认将该sample(sample_face_ae.elf)存放在该路径下
k230_sdk/src/big/mpp/userapps/sample/elf - 由于KPU联动需要使用检测模型test.kmodel,编译后存放路径
k230_sdk/src/big/mpp/userapps/sample/elf
2.15.3 执行
启动开发板进入小核/mnt下添加核间通信模块启动核间通信,创建共享文件系统,将sample_face_ae.elf与test.kmodel通过小核共享文件系统共享给大核执行。将文件放入小核文件系统的方式可通过挂载、tftp等方式传输。当前默认文件已经存放在小核~目录下。
cd /mnt
insmod k_ipcm.ko
mkdir /sharefs
cp ~/sample_face_ae.elf /sharefs/
cp test.kmodel /sharefs/
./sharefs &
小核启动sharefs后,大核共享文件系统得到sample与kmodel
cd /sharefs
./sample_face_ae.elf test.kmodel 1 # arg1: 模型名称, arg2: 开启face ae
等待初始化完成提示任意字母+enter
键入a,键入回车,运行face ae demo
执行成功后,会打印每一帧图像的物理地址
2.16 DPU_Vicap_demo
2.16.1 demo 简介
demo 流程如下:
- 启动 vicap;
- 在用户态 dump 一帧散斑图;
- 把从 vicap 处获取的散斑图送给 dma 进行旋转九十度的处理;
- 在用户态获取 dma 旋转后的图像;
- 将 dma 旋转后的图像送给 dpu 进行深度处理;
- 在用户态获取 dpu 处理后的深度图;
- 以文件的形式保存到大小核共享目录
/sharefs下,可以通过mnt操作将该文件共享到服务器上并使用工具查看深度图。
2.16.2 Feature 说明
isp 捕获图像,dma 进行图像旋转,dpu 进行深度处理。
2.16.3 依赖资源
需要标定文件,包括配置文件和参考图文件。配置文件和参考图文件需要和 sensor 配套。配置文件和参考图文件路径在k230_sdk/test_resource/dpu目录下,该配置文件和参考图文件仅和 sensor1 对应。
2.16.4 使用说明
2.16.4.1 编译
- 将配置文件和参考图文件放在
k230_sdk/src/big/rt-smart/userapps/root/bin/dpu目录下,如下图所示:
- 在
k230_sdk目录下执行编译命令make - 编译完成后在
k230_sdk/src/big/mpp/userapps/sample/elf目录下会有 demo 对应的sample_dpu_vicap.elf文件。在k230_sdk/output/k230_evb_defconfig/images目录下会有系统镜像文件sysimage-sdcard.img。
更详细的编译过程可以参考release sdk软件包中的README.md。
2.16.4.2 执行
-
挂载 nfs,使用如下命��令:
ifconfig eth0 up
udhcpc
# 下面的 ip 地址和路径换成自己服务器的 ip 和路径
mount -t nfs 10.10.1.94:/home/user/nfs /sharefs -o nolock挂载成功以后在大小核都可以看到
/sharefs目录,将编译出来的 demosample_dpu_vicap.elf拷贝到服务器的 nfs 目录下(在这里是/home/user/nfs),此时在大核 rtt 的/sharefs下也能看到对应的 elf 文件 -
使用命令
./sample_dpu_vicap.elf -dev 0 -sensor 2 -chn 0 -preview 1 -rotation 1启动 demo,输出打印信息如下所示: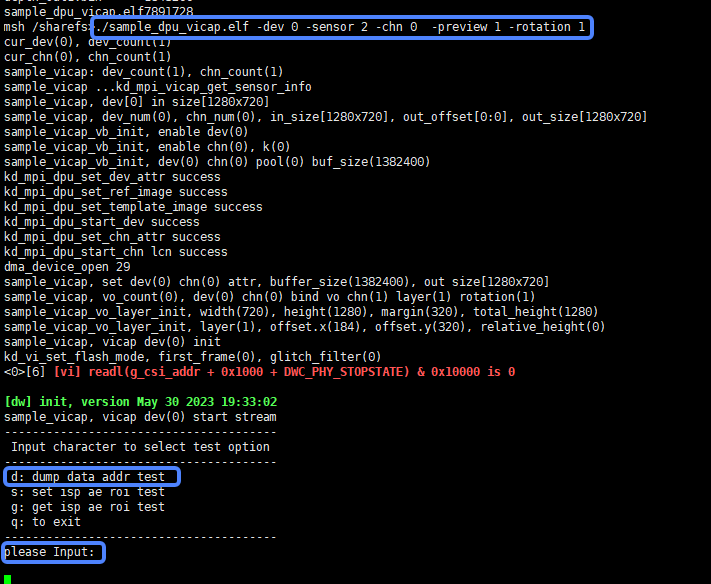
-
输入
d,输出打印信息如下所示: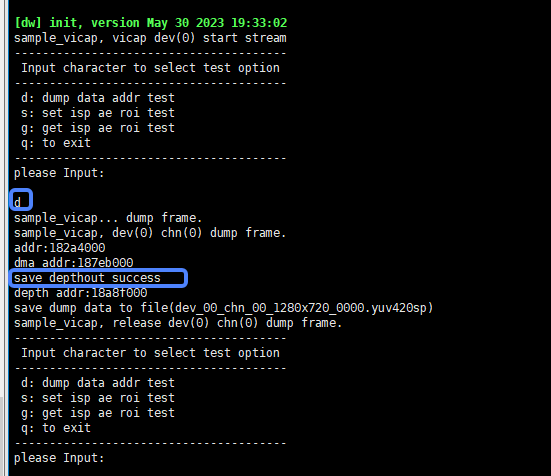
-
输入
q,退出程序。 -
此时在
/sharefs目录下有depth_out.bin文件,此文件即是 dpu 输出的深度图文件,可以用相应软件打开查看。
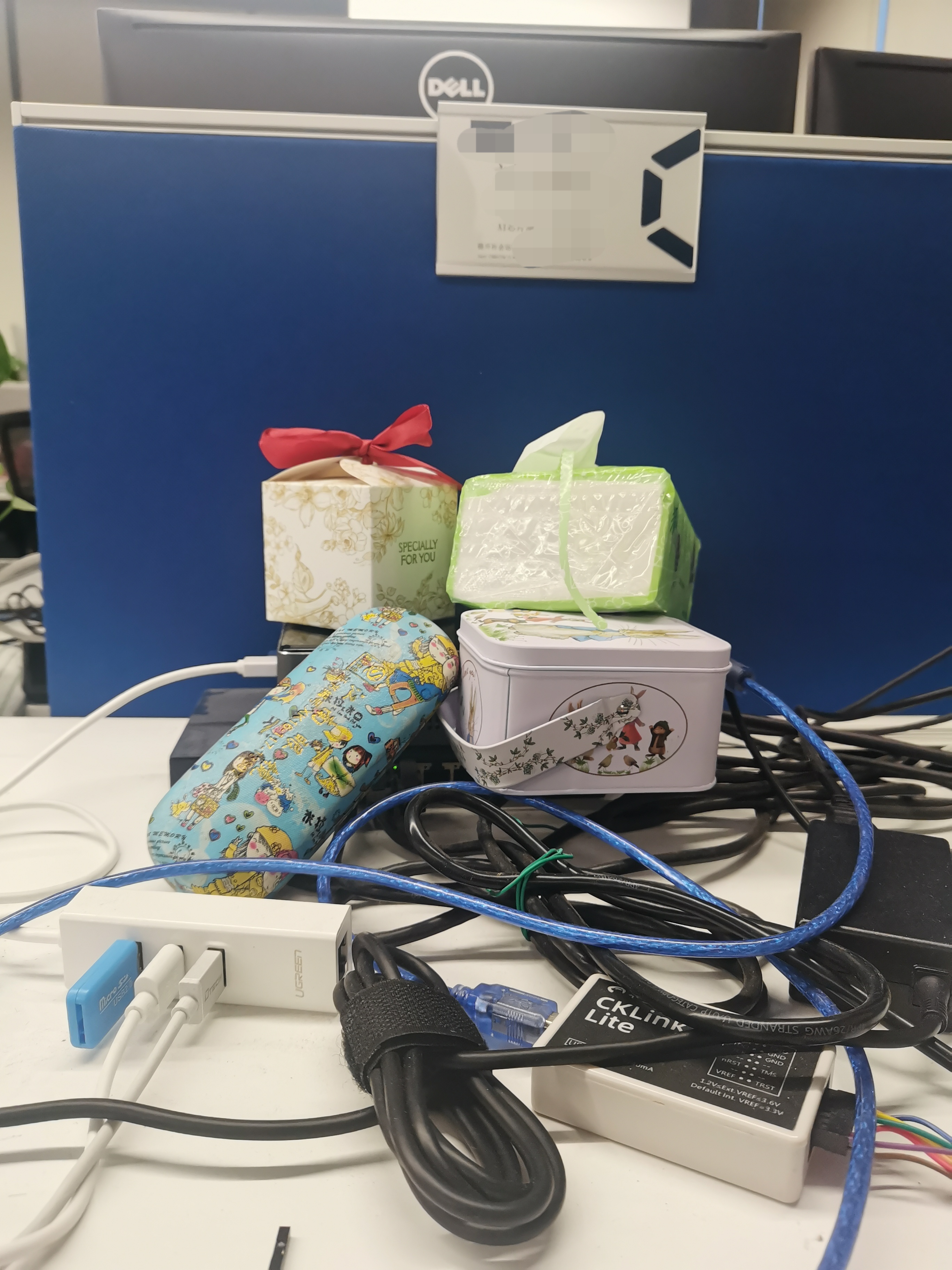
2.16.4.3 效果如下
-
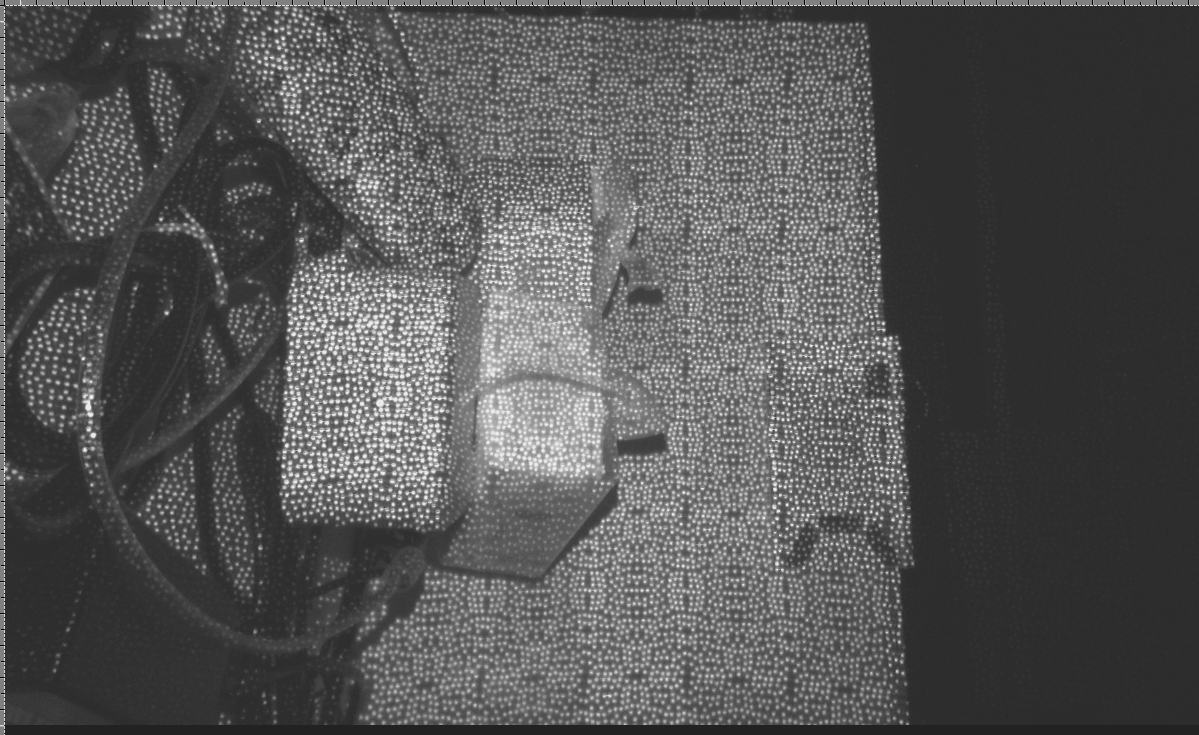
实际场景如下:
-
sensor 拍摄出来的散斑图如下:
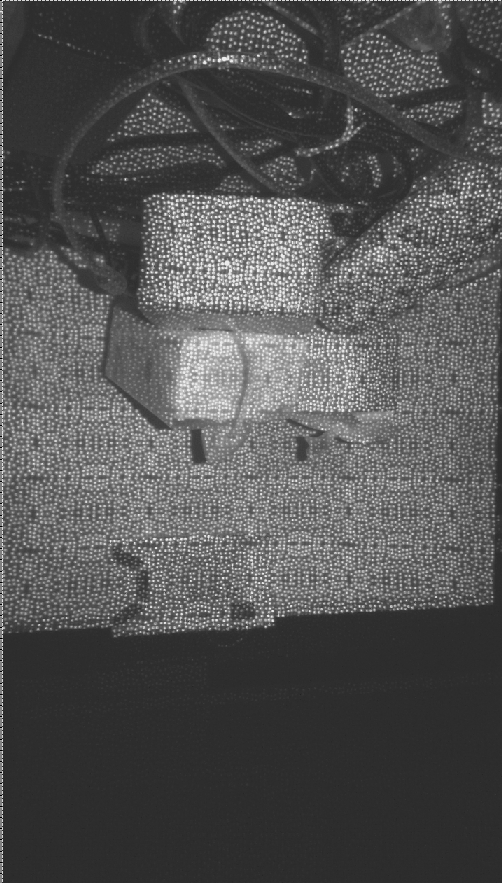
-
dma 顺时针旋转九十度以后的散斑图如下:
-
dpu 输出的深度图结果如下:

2.17 VICAP_DMA_DPU_demo
2.17.1 demo 简介
demo 流程如下:
- 将 vicap 绑定 dma,dma 绑定 dpu;
- 启动 dpu,dma,vicap;
- isp 把散斑图送给 dma,dma 旋转九十度以后送给 dpu,dpu 进行深度处理以后将深度图地址打印在屏幕上;
2.17.2 Feature 说明
isp 捕获图像,dma 进行图像旋转,dpu 进行深度处理。
2.17.3 依赖资源
需要标定文件,包括配置文件和参考图文件。配置文件和参考图文件需要和 sensor 配套。配置文件和参考图文件路径在k230_sdk/test_resource/dpu目录下,该配置文件和参考图文件仅和 sensor1 对应。
2.17.4 使用说明
2.17.4.1 编译
-
将配置文件和参考图文件放在
k230_sdk/src/big/rt-smart/userapps/root/bin/dpu目录下,如下图所示: -
在
k230_sdk目录下执行编译命令make -
编译完成后在
k230_sdk/src/big/mpp/userapps/sample/elf目录下会有 demo 对应的sample_vdd_r.elf文件。在k230_sdk/output/k230_evb_defconfig/images目录下会有系统镜像文件sysimage-sdcard.img。
更详细的编译过程可以参考release sdk软件包中的README.md。
2.17.4.2 执行
-
挂载 nfs,使用如下命令:
ifconfig eth0 up
udhcpc
# 下面的 ip 地址和路径换成自己服务器的 ip 和路径
mount -t nfs 10.10.1.94:/home/user/nfs /sharefs -o nolock挂载成功以后在大小核都可以看到
/sharefs目录,将编译出来的 demosample_vdd_r.elf拷贝到服务器的 nfs 目录下(在这里是/home/user/nfs),此时在大核 rtt 的/sharefs下也能看到对应的 elf 文件 -
使用命令
./sample_vdd_r.elf启动 demo; -
输入
q停止 demo 运行,并将深度图以文件的形式保存到/sharefs下面,名字为depthout.bin -
可以使用相应软件查看该深度图。
-
效果如下:

2.18 语音对讲Demo
2.18.1 Demo简介
本Demo用于演示音频数据的双向传输和处理(当前版本实现了语音对讲的部分功能)
2.18.2 Feature说明
语音对讲涉及到两端,两端均能实时采集编码发送音频数据到对端,同时也能接收对端来的音频数据进行解码和输出。 当前实现参照了ONVIF,在rtsp协议的基础上扩展backchannel,从而支持从client向server发送音频数据;下文使用server�和client分别代指语音对讲的两端。
目前实现的功能如下:
- 音频码流格式为G711 mu-Law;
- sever端实现了实时的音频采集编码和发送,以及通过backchannel接收来自client的音频数据进行解码和输出; 接收端未实现jitter buffer;
- client端实现了音频码流的接收,解码和播放,以及实时采集音频,G711 mu-Law编码,并通过backchannel发送到server端; 接收端未实现jitter buffer;
- 仅支持一对一的对讲 (仅支持一路backchannel);
- 不支持回声消除等处理 (设备侧需要音频输出到耳机,不能使用外放speaker);
2.18.3 依赖资源
需要两台K230设备, 通过usb转eth网口转换器,将开发板接入同一个局域网
2.18.4 使用说明
2.18.4.1 编译
参考release sdk软件包中的README.md中介绍,在docker环境编译cdk-user即可,编译完成后在k230_sdk/src/common/cdk/user/out/little下生成可执行程序rtsp_server, backchannel_client
2.18.4.2 rtsp_server参数说明
| 参数名 | 描述 | 参数范围 | 默认值 |
|---|---|---|---|
| h | 打印命令行参数信息 | - | - |
| v | 是否创建video session | - | - |
| t | 编码类型 | h264、h265 | h265 |
| w | 视频编码宽度 | [640, 1920] | 1280 |
| h | 视频编码高度 | [480, 1080] | 720 |
| b | 视频编码码率 | - | 2000 |
| a | 变声设置 | [-12, 12] | 0 |
| s | sensor类型 | 查看camera sensor文档 | 7 |
sensor类型查看k230_docs/zh/01_software/board/mpp/K230_Camera_Sensor适配指南.md文档中关于k_vicap_sensor_type的描述
2.18.4.3 执行
为描述方便,运行server的板子命名为板A, 运行client的命名为板B:
- 首先板A运行rtsp_server,麦克输入,耳机输出;
- 然后板B运行backchannel_client,麦克输入,耳机输出;
板A上的具体的执行步骤:
- 启动开发板后,进入小核/mnt目录下:
- 在小核上执行:
insmod k_ipcm.ko - 在大核上执行:
cd /bin; ./sample_sys_init.elf - 在小核上执行:
./rtsp_server(运行rtsp_server后,会打印出形如:rtsp://<server_ip>:8554/BackChannelTest的url地址)
板B上的具体的执行步骤:
- 启动开发板后,进入小核/mnt目录下:
- 在小核上执行:
insmod k_ipcm.ko - 在大核上执行:
cd /bin; ./sample_sys_init.elf - 在小核上执行:
./backclient_test rtsp:<server_ip>:8554/BackChannelTest)
backclient_test执行命令说明:./backclient_test <rtsp_url> <out_type>, 其中rtsp_url为rtsp地址,out_type为vo输出connect type,参看k230_docs/zh/01_software/board/mpp/K230_视频输出_API参考.md中关于k_connector_type的描述,out_type默认设置为0
2.19 深度图显示 Demo
2.19.1 Demo 简介
本 demo 用于将 dpu 处理的深度图显示在屏幕上。
2.19.2 Feature说明
- 将 vicap 绑定 dma,dma 绑定 dpu;
- 启动 dpu,dma,vicap,vo;
- isp 把散斑图送给 dma,dma 旋转九十度以后送给 dpu,dpu 进行深度处理;
- 在用户态获取深度结果;
- 将深度图送给 vo 进行显示。
2.19.3 依赖资源
需要标定文件,包括配置文件和参考图文件。配置文件和参考图文件需要和 sensor 配套。配置文件和参考图文件路径在k230_sdk/test_resource/dpu目录下,该配置文件和参考图文件仅和 sensor1 对应。
2.19.4 使用说明
2.19.4.1 编译
- 将配置文件和参考图文件放在
k230_sdk/src/big/rt-smart/userapps/root/bin/dpu目录下。 - 在
k230_sdk目录下执行编译命令make - 编译完成后在
k230_sdk/src/big/mpp/userapps/sample/elf目录下会有 demo 对应的sample_dpu_vo.elf文件。在k230_sdk/output/k230_evb_defconfig/images目录下会有系统镜像文件sysimage-sdcard.img。
更详细的编译过程可以参考release sdk软件包中的README.md。
2.19.4.2 执行
- 挂载 nfs,挂载成功以后在大小核都可以看到
/sharefs目录,将编译出来的 demosample_dpu_vo.elf拷贝到服务器的 nfs 目录下,此时在大核 rtt 的/sharefs下也能看到对应的 elf 文件. - 使用命令
./sample_dpu_vo.elf启动 demo,此时会在屏幕上显示 dpu 处理后的深度图。 - 按’q’退出 demo。
2.20 OTA远程升级 Demo
2.20.1 Demo 简介
OTA为空中下载技术(Over The Air),区别于现场刷机,通过网络对设备固件进行更新。
2.20.2 Feature说明
- 烧录方式与更新固件都存放在远端服务器上,方便修改。
- 支持升级包验签加密,保证数据完整性以及安全性;
- 未支持灾难恢复方案。常见的OTA灾难恢复机制有A/B备份方案,或Recovery方案。K230的应用场景可能使用容量小的Norflash,也可能使用容量大的eMMC。具体的使用场景可以基于此Demo进行开发。
2.20.3 依赖资源
搭建http服务器,如使用hfs网络文件服务器。
2.20.4 使用说明
2.20.4.1 制作升级包
xxx@develop:~/k230/k230_sdk/tools/ota$ tree
.
├── ota_package
│ ├── rootfs
│ │ ├── etc
│ │ └── mnt
│ └── rtt_system.bin
├── ota_private.pem
├── ota_public.pem
├── ota_upgrade.sh
├── package_kpk.sh
└── README
- 升��级包制作方法:进入k230_sdk/tools/ota目录,执行./package_kpk.sh ota_package会产生ota_package.kpk即为升级包。ota_package目录自行创建,包含了需要升级的分区固件(如rtt_system.bin),以及小核linux的文件系统的文件。值得注意的是,升级的机制是把升级包下载到内存然后解压缩进行烧录,受限于内存容量限制,ota_package 包含的分区文件大小不能太大,不超过20MB。可以分多次烧录。
- 不同介质的分区固件参考k230_sdk/tools/gen_image_cfg/xxx.cfg文件,即使有的分区在小核linux系统上看不到,也可以通过offset偏移地址对整个磁盘空间进行擦写升级。
- ota_upgrade.sh 是设备端执行的升级脚本,如果分区有修改,需要对这个脚本做对应的修改。
- ota_private.pem 升级包签名的私钥,需要把公钥编译或拷贝到设备的/etc/目录下。参考README
2.20.4.2 编译设备端程序
- 设备端的ota程序位于buildroot-ext/package/ota,编译buildroot会把ota程序安装到文件系统的/usr/bin目录下,ota.cfg安装到/etc/目录下。ota.cfg可配置服务器端升级包的下载链接以及公钥的路径。
2.20.4.3 执行
- 打开hfs.exe,Add folder from disk添加一个目录,把升级包拷贝到这个目录。
- 先确保开发板网络与服务器可以正常通信。开发板上执行ota即可完成升级包的下载以及升级操作。
2.21 FFT Demo
2.21.1 Demo 简介
本 demo 用于验证fft api使用,测试fft功能,代码见src/big/mpp/userapps/sample/sample_fft/
2.21.2 Feature说明
先进行fft计算,在进行ifft计算
2.21.3 依赖资源
无
2.21.4 使用说明
2.21.4.1 编译
请参考release sdk软件包中的README.md。
2.21.4.2 执行
-
大小核系统都起来后,在大核命令行执行下面命令:
cd /sharefs/app;./sample_fft.elf大核串口输出内容如下:
msh /sharefs/app>./sample_fft.elf 1 0
-----fft ifft point 0064 -------
max diff 0003 0001
i=0045 real hf 0000 hif fc24 org fc21 dif 0003
i=0003 imag hf ffff hif 0001 org 0000 dif 0001
-----fft ifft point 0064 use 133 us result: ok
-----fft ifft point 0128 -------
max diff 0003 0002
i=0015 real hf 0001 hif fca1 org fc9e dif 0003
i=0031 imag hf 0001 hif fffe org 0000 dif 0002
-----fft ifft point 0128 use 121 us result: ok
-----fft ifft point 0256 -------
max diff 0003 0001
i=0030 real hf 0000 hif fca1 org fc9e dif 0003
i=0007 imag hf ffff hif 0001 org 0000 dif 0001
-----fft ifft point 0256 use 148 us result: ok
-----fft ifft point 0512 -------
max diff 0003 0003
i=0060 real hf 0000 hif fca1 org fc9e dif 0003
i=0314 imag hf 0001 hif fffd org 0000 dif 0003
-----fft ifft point 0512 use 206 us result: ok
-----fft ifft point 1024 -------
max diff 0005 0002
i=0511 real hf 0000 hif fc00 org fc05 dif 0005
i=0150 imag hf 0000 hif fffe org 0000 dif 0002
-----fft ifft point 1024 use 328 us result: ok
-----fft ifft point 2048 -------
max diff 0005 0003
i=1022 real hf 0000 hif fc00 org fc05 dif 0005
i=1021 imag hf 0000 hif 0003 org 0000 dif 0003
-----fft ifft point 2048 use 574 us result: ok
-----fft ifft point 4096 -------
max diff 0005 0002
i=4094 real hf 027b hif 041f org 0424 dif 0005
i=0122 imag hf 0000 hif 0002 org 0000 dif 0002
-----fft ifft point 4096 use 1099 us result: ok