线段检测
1.实验目的
实现K230对图像中的线段进行检测。
2.实验原理
2.1 原理解析
线段检测的核心原理是 Hough变换(Hough Transform)。它是一种经典的图像处理算法,广泛用于检测图像中的几何形状(如直线、圆、椭圆等)。
一般我们使用斜截式 y = kx + b 表示直线,但当直线是垂直时 k=∞,不便处理��。
因此在 Hough 变换中,我们改用 极坐标表示法:
cpp
复制编辑
ρ = x * cos(θ) + y * sin(θ)
其中:
ρ:直线到图像原点的距离(距离)θ:直线与水平线的夹角(角度)
Hough 变换核心思想
可以理解为一个投票机制:
-
边缘检测 首先用边缘检测算法(如 Sobel、Canny)提取图像中的边缘点。
-
每个边缘点投票所有可能的直线 对于图像�中的每个边缘点
(x, y),我们可以计算它对应于一系列直线(每个不同的θ),然后用公式求出对应的ρ。每对
(θ, ρ)表示一条直线。 -
累加器统计 在二维空间(θ-ρ)中,每个边缘点都对它可能属于的直线投票(即在累加器中
acc[θ][ρ] += 1)。 -
找峰值 累加器中投票数较高的点(局部极大值)表示图像中存在对应
θ和ρ的直线。
合并与滤除
Hough 检测可能会检测出多个很相似的直线,因此:
theta_margin和rho_margin控制相似直线的合并threshold是投票数阈值,用于滤除弱边缘产生的“伪线条”
2.2 API
find_lines 函数用于在图像中检测直线。该函数适用于寻找图像中的长直线。
- 语法
lines = img.find_lines(threshold=1000, theta_margin=20, rho_margin=20)
-
参数解释
- threshold: 直线的最小长度。检测到的直线必须超过这个长度。默认值是
1000。 - theta_margin: 角度的容忍度。单位是度。默认值是
20。 - rho_margin: 距离的容忍度。单位是像素。默认值是
20。
- threshold: 直线的最小长度。检测到的直线必须超过这个长度。默认值是
-
返回值
返回一个包含直线信息的列表。每条直线是一个
Line对象,包含了直线的起点、终点、长度和角度。
3.代码解析
采集一张图片
img = sensor.snapshot()
从摄像头采集一帧图像,格式为 RGB565(即每个像素占用16位数据,包含红绿蓝三色通道)。img 对象包含了采集的图像数据。
直线检测
for l in img.find_lines(threshold=1000, theta_margin=25, rho_margin=25):
img.find_lines(...) 使用 Hough 变换进行直线检测,返回一个包含所有检测到的直线的对象列表。
threshold=1000:控制检测的灵敏度,较小的值会检测更多细小线条,而较大的值会排除弱边缘线。theta_margin=25, rho_margin=25:用于合并相似直线。如果两条直线的theta和rho值之间的差异小于设定的容差(theta_margin和rho_margin),那么这两条线会被合并为一条。
角度过滤与绘制线段
if (min_degree <= l.theta()) and (l.theta() <= max_degree): # 角度过滤
img.draw_line([v for v in l.line()], color=(255, 0, 0)) # 绘制红色直线
print(l) # 打印直线参数信息(theta、rho、坐标等)
l.theta() ��返回直线相对于水平线的角度(单位为度)。min_degree 和 max_degree 定义了有效直线的角度范围。只有在角度范围内的直线才会被绘制。
img.draw_line(...) 在图像上绘制直线。直线的坐标通过 l.line() 获得,该方法返回直线的两个端点的坐标。
color=(255, 0, 0):绘制红色的直线。
print(l) 打印当前直线的参数(例如:角度、距离和端点坐标等),用于调试和查看检测到的直线信息。
显示图像
Display.show_image(img) # 将结果图像显示在 IDE 中
img = None # 释放图像引用
Display.show_image(img) 将处理后的图像显示在 IDE 中,便于用户查看检测结果。
img = None 释放图像引用,帮助避免内存泄漏或不必要的内存占用。
4.示例代码
'''
本程序遵循GPL V3协议, 请遵循协议
实验平台: DshanPI CanMV
开发板文档站点 : https://eai.100ask.net/
百问网学习平台 : https://www.100ask.net
百问网官方B站 : https://space.bilibili.com/275908810
百问网官方淘宝 : https://100ask.taobao.com
'''
import time, os, gc, sys
from media.sensor import *
from media.display import *
from media.media import *
# 设置图像采集的分辨率(宽度向上对齐到16的倍数,兼容底层硬件)
DETECT_WIDTH = ALIGN_UP(800, 16)
DETECT_HEIGHT = 480
# 设置角度过滤范围(只检测角度在该范围内的直线)
min_degree = 0
max_degree = 179
# 所有 line 对象都提供以下方法:
# - `theta()`:获取该直线相对于水平线的角度(单位:度)
# - `x1(), y1(), x2(), y2()`:获取直线的两个端点坐标
# - `line()`:返回 [x1, y1, x2, y2] 形式的元组,用于绘图
# 关于负 rho 值的说明:
# 如果一条线的表示是 [theta+0, -rho],等价于 [theta+180, +rho]
sensor = None # 全局摄像头对象
# 摄像头初始化函数
def camera_init():
global sensor
# 创建 Sensor 对象,设置图像分辨率
sensor = Sensor(width=DETECT_WIDTH, height=DETECT_HEIGHT)
sensor.reset() # 复位传感器
# 如有需要可以�开启水平/垂直镜像
# sensor.set_hmirror(False)
# sensor.set_vflip(False)
sensor.set_framesize(width=DETECT_WIDTH, height=DETECT_HEIGHT) # 设置输出分辨率
sensor.set_pixformat(Sensor.RGB565) # 设置图像格式为 RGB565 彩图
Display.init(Display.ST7701, width=DETECT_WIDTH, height=DETECT_HEIGHT, fps=60, to_ide=True) # 初始化虚拟显示(IDE 输出)
MediaManager.init() # 初始化媒体资源管理器
sensor.run() # 启动摄像头采集
# 摄像头资源释放函数
def camera_deinit():
global sensor
sensor.stop() # 停止采集
Display.deinit() # 释放显示设备
os.exitpoint(os.EXITPOINT_ENABLE_SLEEP) # IDE 模式休眠标记
time.sleep_ms(100) # 延时确保退出稳定
MediaManager.deinit() # 释放媒体资源(缓存池)
# 图像采集与线段检测主循环
def capture_picture():
fps = time.clock() # 用于帧率统计
while True:
fps.tick() # 本帧开始计时
try:
os.exitpoint() # IDE 中断控制支持
global sensor
img = sensor.snapshot() # 采集一帧图像(RGB565 彩图)
# 开始进行直线检测,返回 line 对象列表
# 参数说明:
# - threshold:阈值,决定哪些直线被认为是“有效直线”
# 较小的阈值将检测更多细小线条,较大的值可排除弱边缘线
# - theta_margin/rho_margin:控制相似直线合并容差,单位分别为角度/像素
for l in img.find_lines(threshold=1000, theta_margin=25, rho_margin=25):
if (min_degree <= l.theta()) and (l.theta() <= max_degree): # 角度过滤
img.draw_line([v for v in l.line()], color=(255, 0, 0)) # 绘制红色直线
print(l) # 打印直线参数信息(theta、rho、坐标等)
Display.show_image(img) # 将结果图像显示在 IDE 中
img = None # 释放图像引用
gc.collect() # 执行垃圾回收,避免内存堆积
print(fps.fps()) # 输出当前帧率
except KeyboardInterrupt as e:
print("用户中断运行:", e)
break
except BaseException as e:
print(f"运行异常:{e}")
break
# 主函数
def main():
os.exitpoint(os.EXITPOINT_ENABLE) # 启用 IDE 中断控制
camera_is_init = False # 标志变量,避免未初始化直接释放资源
try:
print("摄像头初始化中...")
camera_init()
camera_is_init = True
print("开始图像采集与线段检测...")
capture_picture()
except Exception as e:
print(f"主程序异常:{e}")
finally:
if camera_is_init:
print("释放摄像头资源...")
camera_deinit()
# 程序入口点
if __name__ == "__main__":
main()
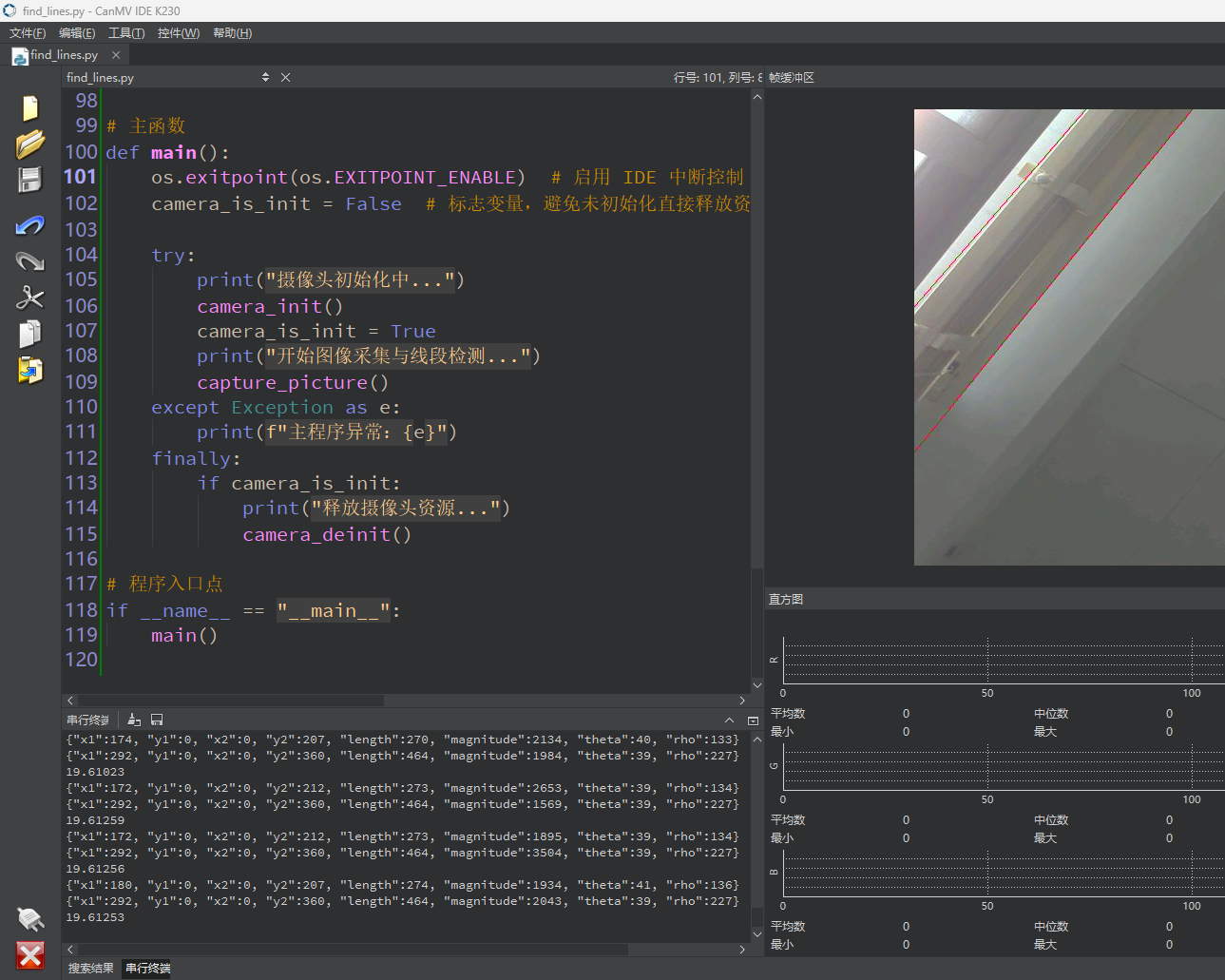
5.实验结果
点击运行代码后,可以在显示屏上看到直线检测的结果。