快速线性回归
1.实验目的
实现K230对图像中的直线进行线性回归。
2.实验原理
2.1 原理解析
快速线性回归的原理是基于最小二乘法(Least Squares Method),其核心思想是:
在一组二维平面点中,寻找一条直线 y=ax+by = ax + by=ax+b,使所有点到该直线的“垂直距离的平方和”最小。
��这种方法在图像处理中也很常用,比如在 CanMV 中的 get_regression(),它会在图像上的非零像素点集合中,寻找一条最优拟合直线。
在图像上,我们对所有非零像素(或满足阈值的像素)的位置 (x,y)(x, y)(x,y) 执行最小二乘法,即:
- 把每个符合条件的像素看作一个点;
- 然后对这些点拟合出一条最佳线性模型;
- 结果中返回的是线段坐标、斜率角度 θ、极坐标形式 rho、以及拟合质量指标
magnitude。
2.2 API
get_regression 函数用于从图像中检测回归线,即拟合数据点的直线。通常用于标记数据的趋势或方向。
- 语法
line = img.get_regression(threshold=1000, min_length=10, max_distance=5)
-
参数解释
- threshold:直线的最小长度。默认值是
1000。 - min_length: 拟合线的最小长度。默认值是
10。 - max_distance: 允许的数据点到回归线的最大距离。默认值是
5。
- threshold:直线的最小长度。默认值是
-
返回值
返回一个包含回归线信息的
Line对象,表示拟合的直线。
3.代码解析
获取当前图像帧
img = sensor.snapshot()
进行二值化
if BINARY_VISIBLE:
img = img.binary([THRESHOLD])
线性回归检测
line = img.get_regression([(255, 255)] if BINARY_VISIBLE else [THRESHOLD])
绘制灰色直线
if line:
img.draw_line(line.line(), color=127)
显示图像结果
Display.show_image(img)
4.示例代码
'''
本程序遵循GPL V3协议, 请遵循协议
实验平台: DshanPI CanMV
开发板文档站点 : https://eai.100ask.net/
百问网学习平台 : https://www.100ask.net
百问网官方B站 : https://space.bilibili.com/275908810
百问网官方淘宝 : https://100ask.taobao.com
'''
import time, os, gc, sys
from media.sensor import * # 摄像头接口
from media.display import * # 图像显示接口
from media.media import * # 媒体资源管理接口
# 设置检测图像尺寸(必须16字节对齐)
DETECT_WIDTH = ALIGN_UP(800, 16)
DETECT_HEIGHT = 480
# 设置灰度图像二值化的阈值范围(识别暗色区域)
THRESHOLD = (0, 100)
# 是否显示二值图像(便于观察回归线检测依据)
BINARY_VISIBLE = True
sensor = None # 摄像头对象(全局变量)
# 摄像头初始化函数
def camera_init():
global sensor
# 创建摄像头对象,并设置图像尺寸
sensor = Sensor(width=DETECT_WIDTH, height=DETECT_HEIGHT)
sensor.reset() # 复位摄像头配置
# 可选配置:图像镜像和翻转(根据实际安装方向)
# sensor.set_hmirror(False)
# sensor.set_vflip(False)
# 设置摄像头输出图像格式和尺寸
sensor.set_framesize(width=DETECT_WIDTH, height=DETECT_HEIGHT)
sensor.set_pixformat(Sensor.GRAYSCALE) # 设置图像格式为灰度图
# 使用虚拟显示器(例如IDE窗口)进行图像显示
Display.init(Display.ST7701, width=DETECT_WIDTH, height=DETECT_HEIGHT, fps=100, to_ide=True)
# 初始化媒体管理器,处理图像资源
MediaManager.init()
# 启动摄像头
sensor.run()
# 摄像头资源释放函数
def camera_deinit():
global sensor
sensor.stop() # 停止摄像头图像采集
Display.deinit() # 关闭显示器
os.exitpoint(os.EXITPOINT_ENABLE_SLEEP) # 允许系统进入休眠点
time.sleep_ms(100) # 等待硬件处理完成
MediaManager.deinit() # 释放媒体资源
# 图像采集与线性回归检测
def capture_picture():
fps = time.clock() # 初始化帧率计时器
while True:
fps.tick() # 每帧开始计时
try:
os.exitpoint() # 检查系统是否请求退出
global sensor
img = sensor.snapshot() # 获取当前图像帧
# 根据阈值进行二值化(便于线性回归识别)
if BINARY_VISIBLE:
img = img.binary([THRESHOLD])
# 执行线性回归检测(返回一条最佳拟合的线段)
# 返回对象具有 x1/y1, x2/y2(线段两端点坐标),theta/rho(极坐标形式),length(), magnitude() 等方法
# magnitude() 表示回归线拟合的好坏,值越大越准确
line = img.get_regression([(255, 255)] if BINARY_VISIBLE else [THRESHOLD])
# 若存在有效线段,则绘制在图像上
if line:
img.draw_line(line.line(), color=127) # 绘制灰色直线
# 打印帧率和线性拟合质量(magnitude)
print("FPS %f, mag = %s" % (fps.fps(), str(line.magnitude()) if line else "N/A"))
# 在 IDE 或屏幕上显示图像结果
Display.show_image(img)
# 删除图像,手动回收内存
del img
gc.collect()
except KeyboardInterrupt as e:
# 用户主动中断程序
print("用户中止程序:", e)
break
except BaseException as e:
# 捕获其他异常
print(f"发生异常:{e}")
break
# 主程序入口
def main():
os.exitpoint(os.EXITPOINT_ENABLE) # 启用系统退出检测
camera_is_init = False
try:
print("初始化摄像头")
camera_init()
camera_is_init = True
print("开始图像采集和线性回归")
capture_picture()
except Exception as e:
print(f"发生异常:{e}")
finally:
if camera_is_init:
print("释放摄像头资源")
camera_deinit()
# 程序主入口
if __name__ == "__main__":
main()
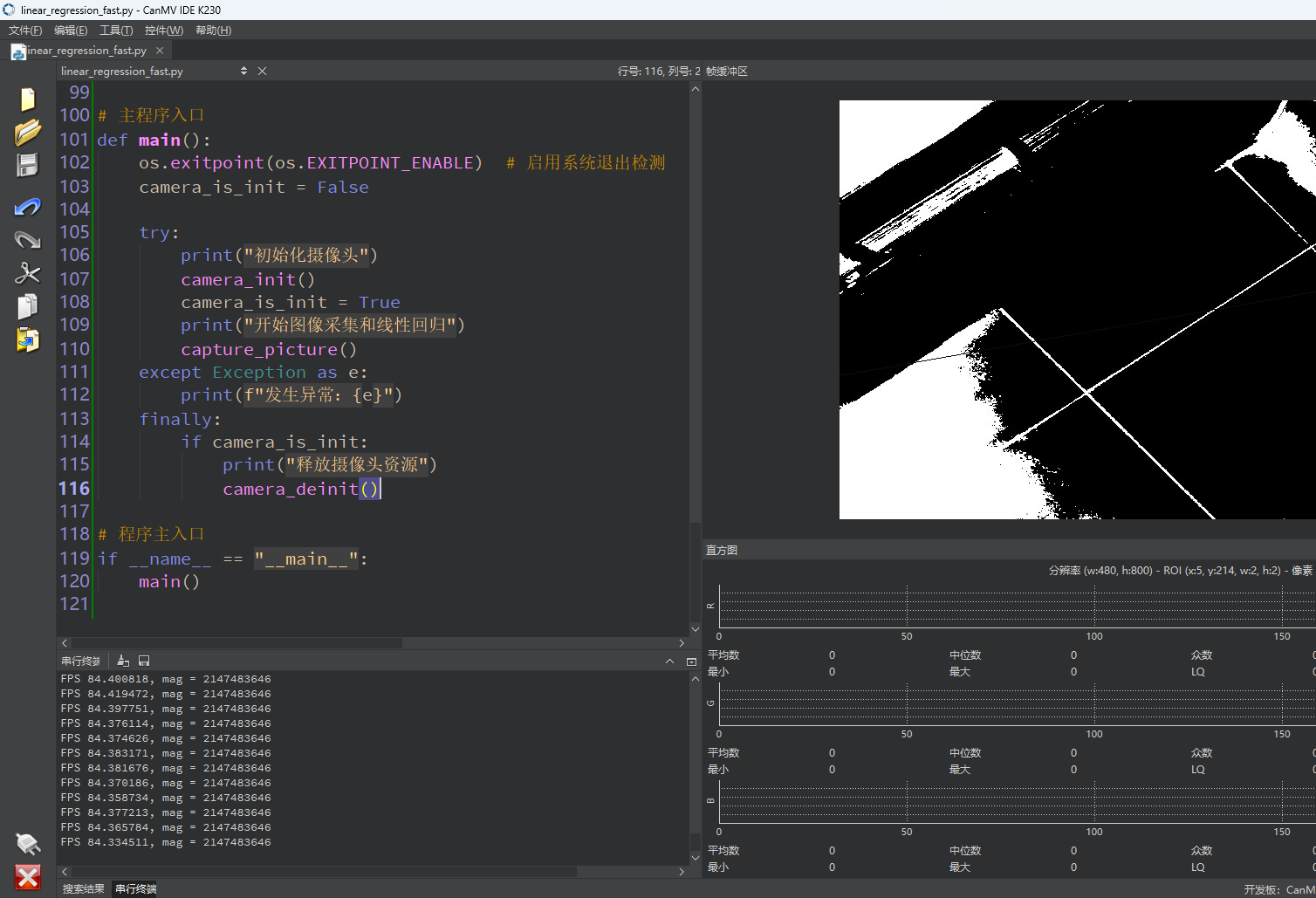
5.实验结果
点击运行代码后,可以在显示屏上看到快速线性回归的结果。