6.深入解析AI开发流程
6.1 概述
1.常规AI开发流程
AI开发流程可分为训练迭代和部署上线两个方面:
- 训练迭代,即从选定特定数据集、模型结构、损失函数和评价指标入手,通过模型参数的不断优化,致力于实现尽可能接近或超越领域内最先进技术(SOTA)的结果。
- 部署上线,即把训练好的模型在特定环境中推理运行的过程,更多关注于部署场景、部署方式、吞吐率和延迟。
AI模型通常通过PyTorch、TensorFlow、飞桨等深度学习框架训练完成,但直接使用训练模型推理有两个问题:直接通过这些模型来进行推理需要依赖这些训练框架,用起来比较复杂;不同的硬件的对算子的底层优化方式可能不同,相同模型运行在不同硬件上效率并不高,特别是对延时要求严格的线上场景;由此,经过工业界和学术界数年的探索,AI开发流程有了一条主流的流水线。
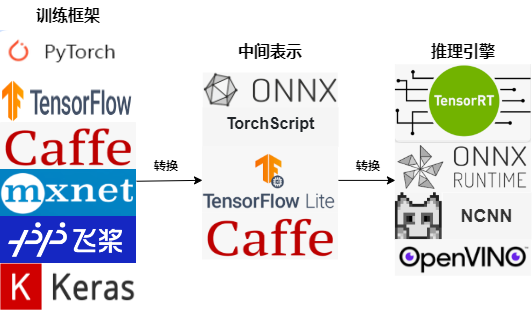
这一条流水线解决了模型部署中的两大问题:使用对接深度学习框架和推理引擎的中间表示,开发者不必担心如何在新环境中运行各个复杂的框架;通过中间表示的网络结构优化、推理引擎对运算的底层优化,模型的运算效率大幅提升。
2.基于K230的AI开发流程

基于K230的AI开发流程与主流AI开发流程类似,也是先训练,再部署。训练时开发者可以使用常见深度学习框架,eg:Pytorch、TensorFlow、飞桨等来定义网络结构,并通过训练确定网络中的参数。之后,模型的结构和参数会被转换成一种只描述网络结构的中间表示,eg:onnx、tflite,一些针对网络结构的优化会在中间表示上进行。最终,将中间表示转换成特�定的文件格式(kmodel),并利用面向K230的推理引擎(K230Runtime),在K230硬件平台上实现模型的高效运行。
相信大家都对训练过程非常熟悉,因此本文着重介绍部署过程。选择开源repo人脸检测、人脸识别(稍后会详细解释两者含义),这两个开源repo都提供了基于Pytorch训练好的模型;因此,本文以Pytorch模型为例,对AI模型在K230的部署过程展开叙述。
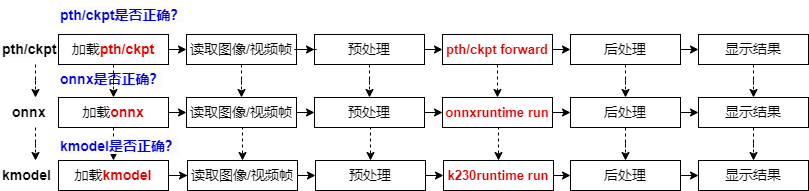
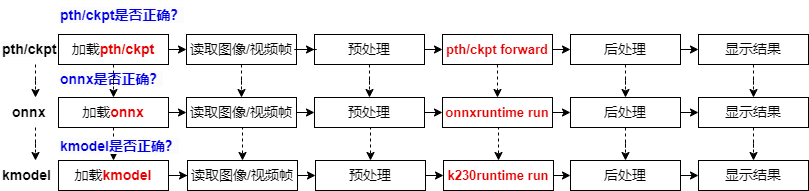
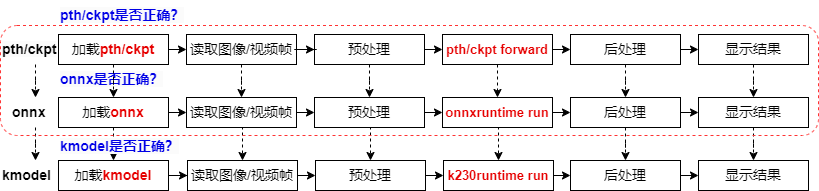
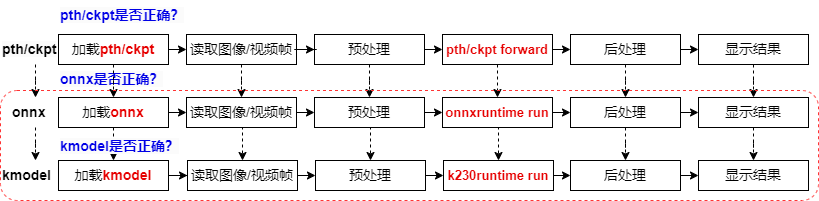
对于Pytorch模型来说,从训练好到部署到K230上,会经过三种文件格式:pth/ckpt->onnx->kmodel,每转成新的文件格式之后,我们都需要验证转换模型的正确性,以保证成功部署。
- 已经训练好的Pytorch模型,我们会用pth推理脚本验证它的正确性;
- 验证pth/ckpt没有问题后,转onnx;
- 转onnx后,验证onnx模型的正确性,需要使用ONNXRuntime来验证,验证流程与Pytorch推理流程类似,包括加载onnx、读取图像/视频流、图像/视频帧预处理、onnx run、后处理、显示结果;
- 验证onnx没有问题,将其转换为kmodel;
- 此时使用K230Runtime来验证kmodel的正确性,验证流程与ONNXRuntime推理流程类似,包括加载kmodel、读取图像/视频流、图像/视频帧预处理、kmodel run、后处理、显示结果;
- kmodel推理流程正确了,我们AI模型就可以成功部署了。
PyTorch模型从训练到在K230上部署经过三个阶段:pth/ckpt验证(通常已验证)、onnx验证(使用ONNXRuntime),最后是kmodel验证(使用K230Runtime)��。每个阶段都需要确保模型的正确性,以保证成功部署。验证流程包括加载模型、处理输入数据、运行推理、处理输出结果,最终确保K230上的AI模型部署成功。
6.2 环境搭建
6.2.1 快速上手
以Windows环境为例,进行快速上手说明。
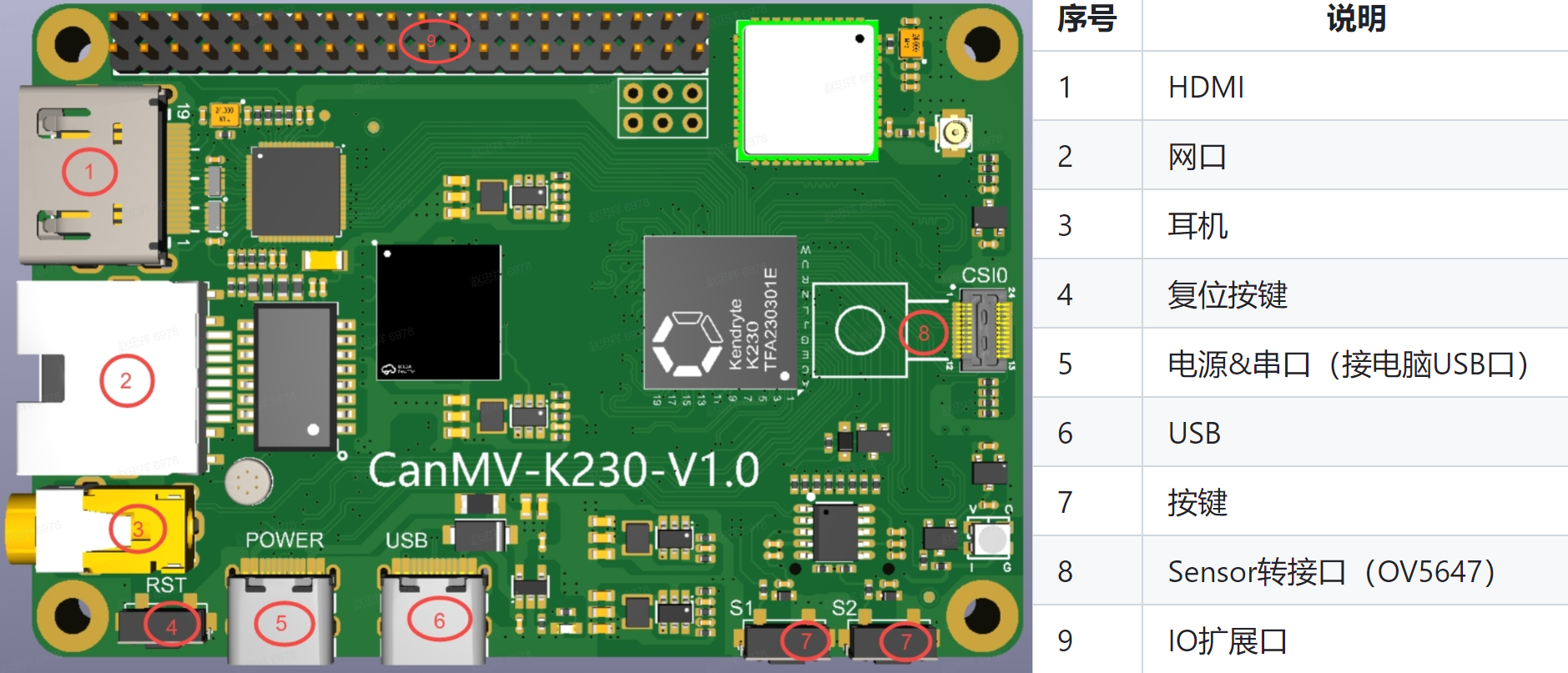
6.2.1.1 CanMV-K230接口说明
说明:CanMV-K230主板电源和串口(与电脑通讯)共用一个TypeC口,如图中⑤所示:
6.2.1.2 CanMV-K230连接示例
请准备如下硬件,然后按照下图连接:
- CanMV-K230
- TypeC USB线 至少1根
- 网线一根(可选)
- HDMI线一根
- SD卡(若是PC没有SD卡插槽,则需要SD卡读卡器)
- 支持HDMI的显示器
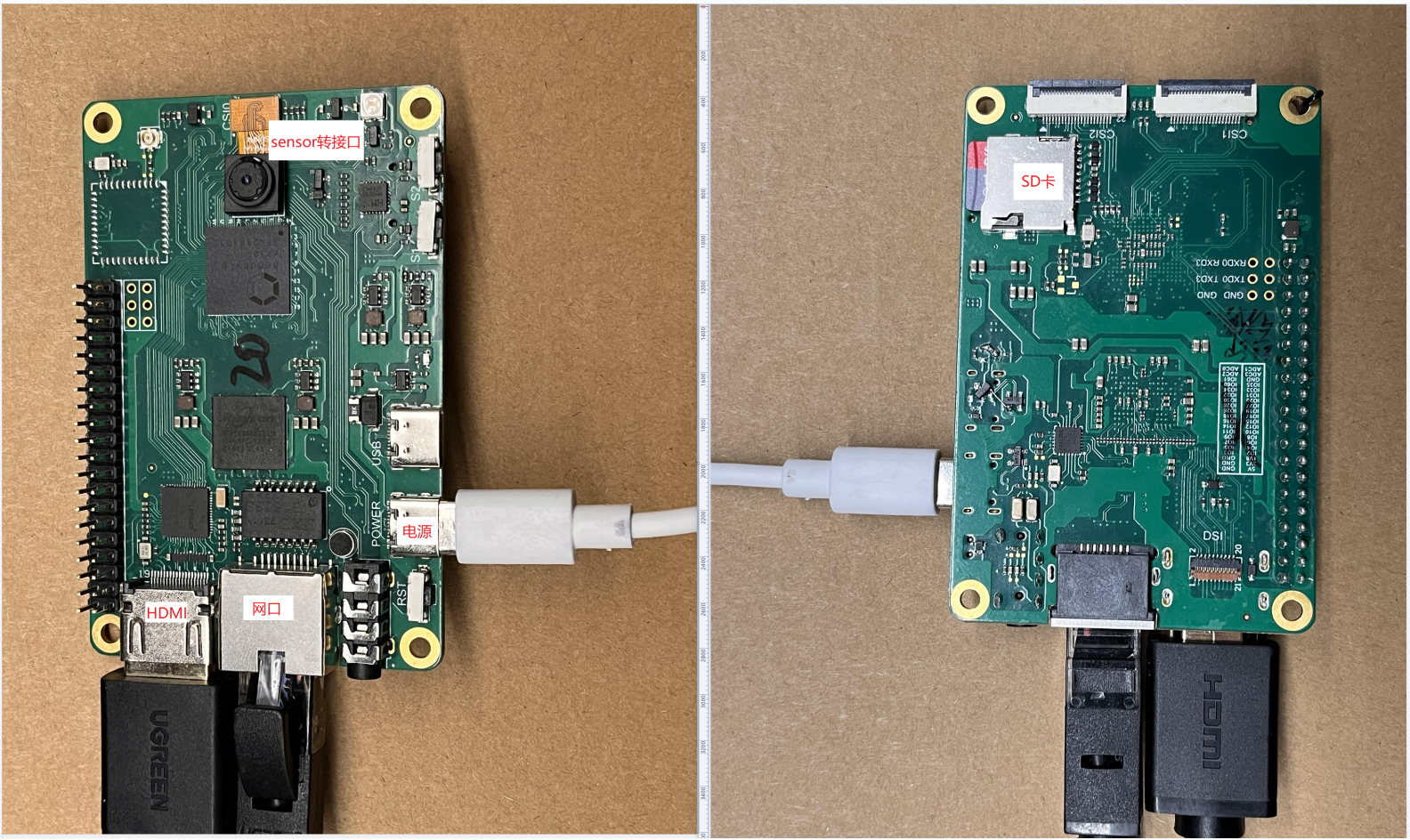
按照上图连接之后,需要在SD卡中烧录镜像,下一小节将会介绍如何烧录镜像。
6.2.1.3 镜像烧录
Linux:
在TF卡插到宿主机之前,输入:
ls -l /dev/sd\*
查看当前的存储设备。
将TF卡插入宿主机后,再次输入:
ls -l /dev/sd\*
查看此时的存储设备,新增加的就是TF卡设备节点。
假设/dev/sdc就是TF卡设备节点,执行如下命令烧录TF卡:
sudo dd if=sysimage-sdcard.img of=/dev/sdc bs=1M oflag=sync
Windows:
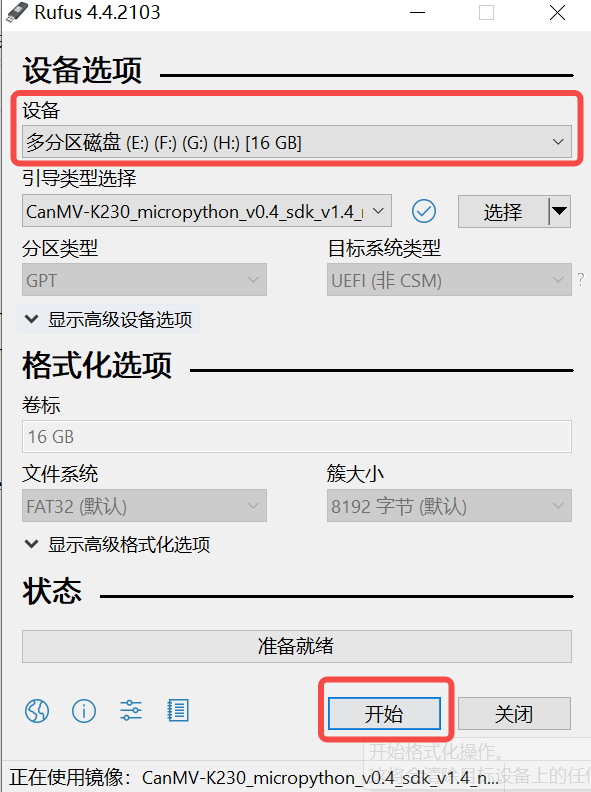
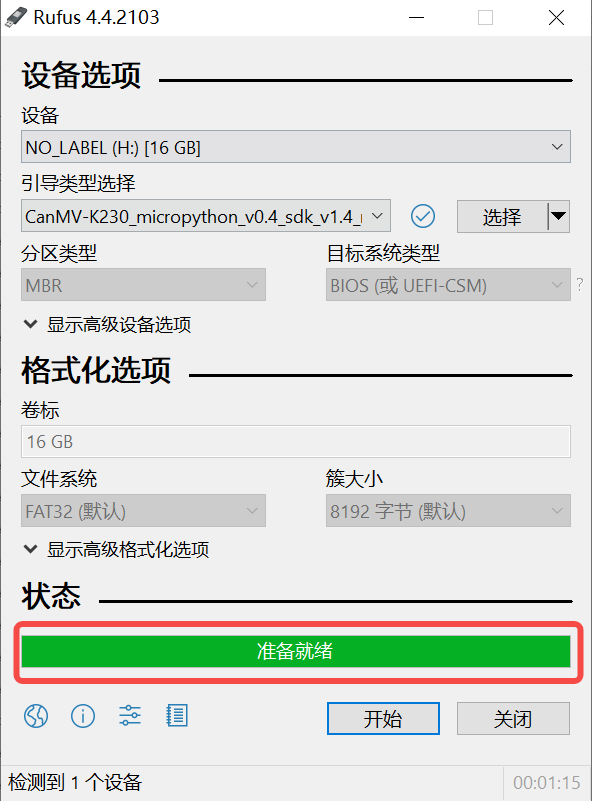
Windows下可通过rufus工具对TF卡进行烧录,rufus工具下载地址。
1)将TF卡插入PC,然后启动rufus工具,点击工具界面的”选择”按钮,选择待烧写的固件。
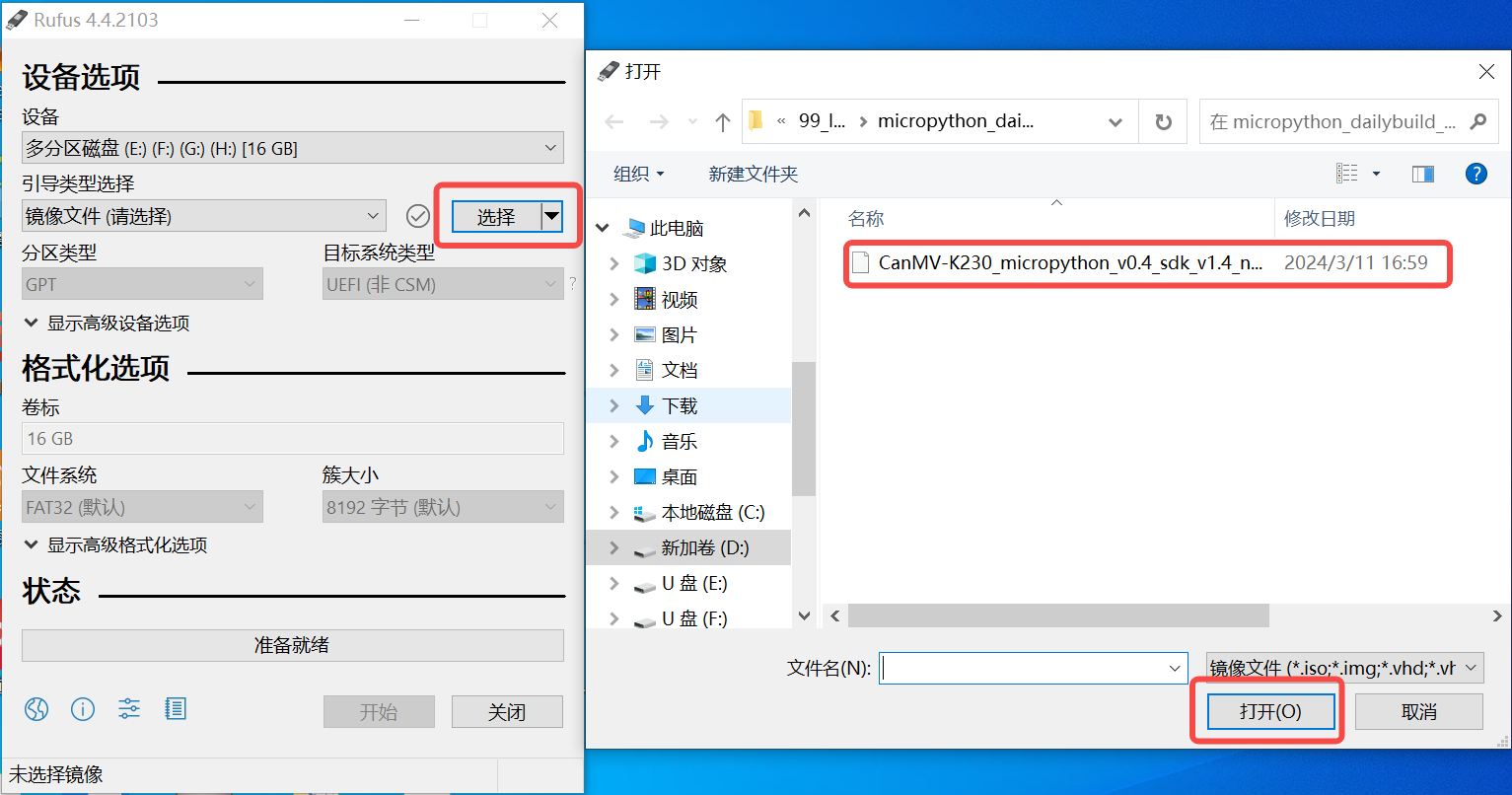
2)点击“开始”按钮开始烧写,烧写过程有进度条展示,烧写结束后会提示“准备就绪”。

说明1:
sysimage-sdcard.img.gz文件时最好先解压缩,烧录解压缩后的文件。
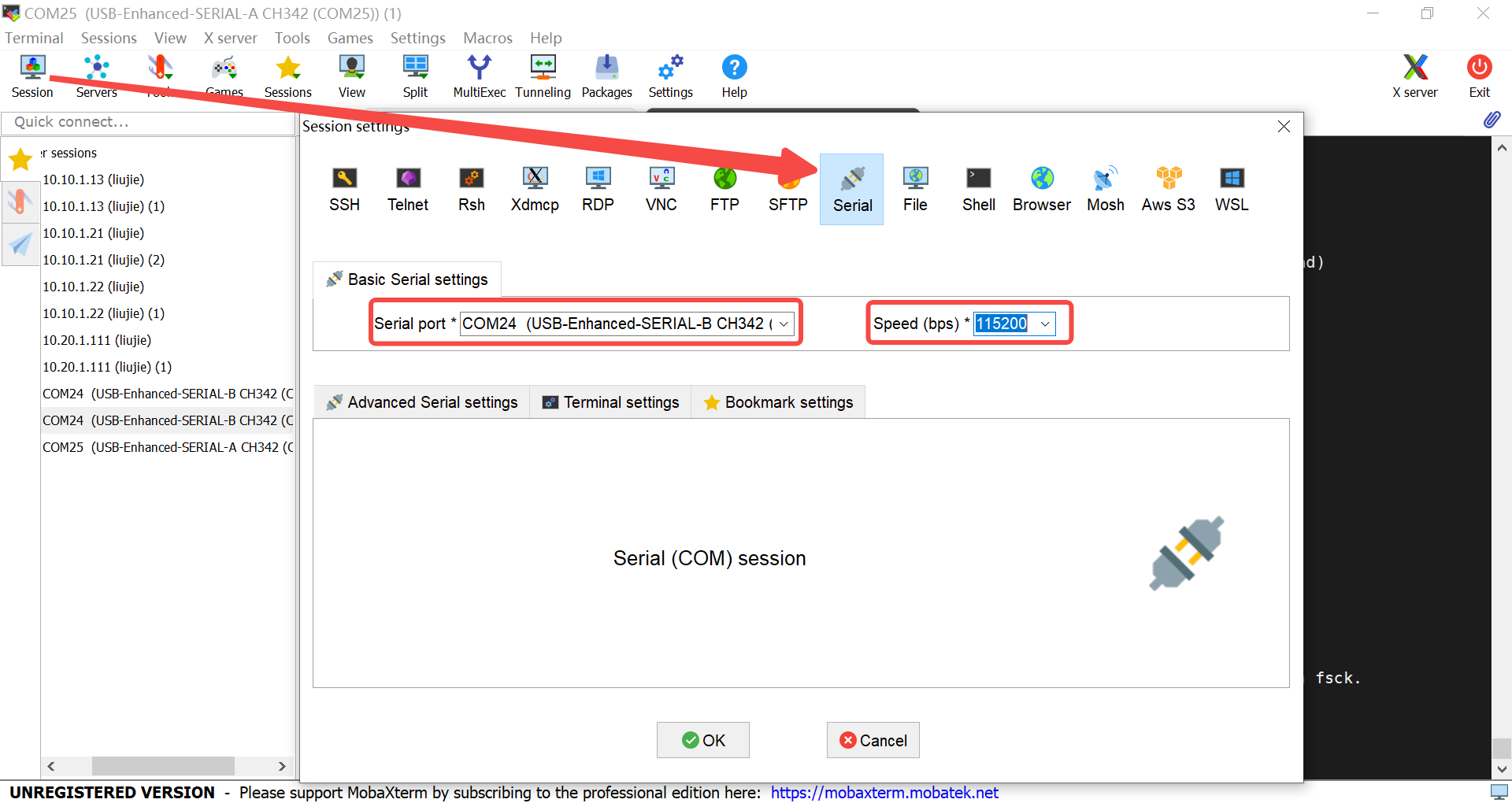
6.2.1.4 串口驱动安装及上电验证
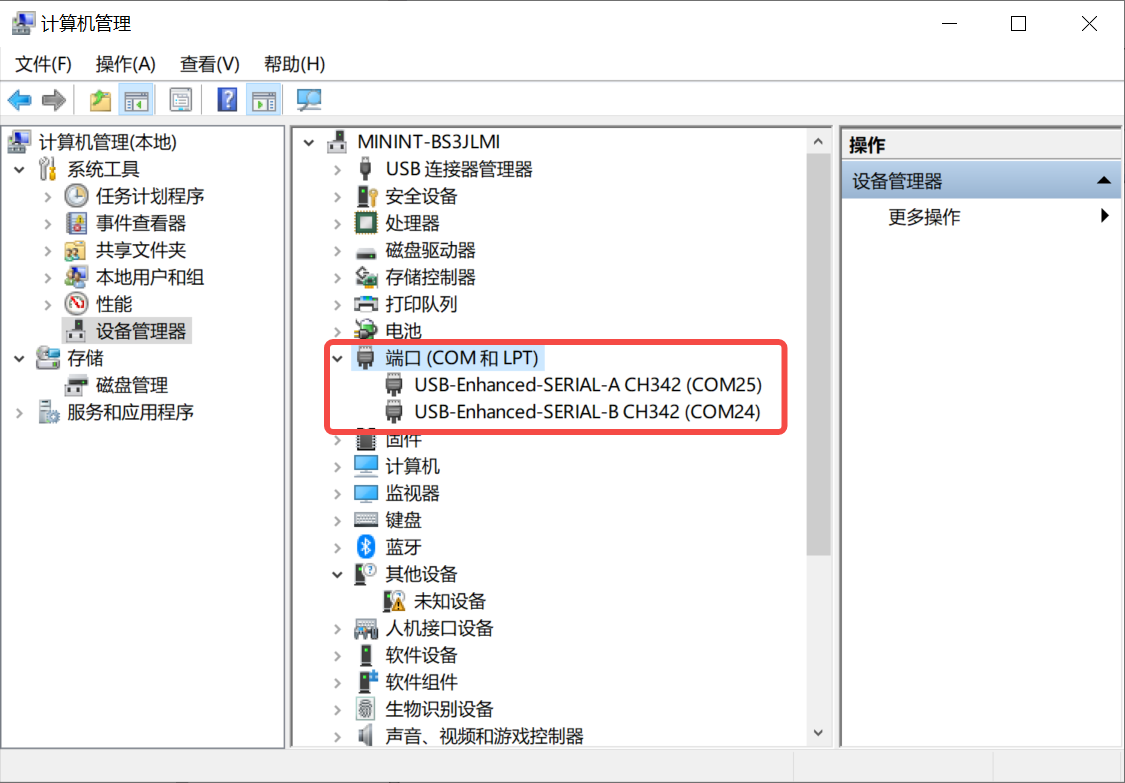
K230 主板通过USB提供两路调试串口,windows下使用调试串口,需要安装USB转串口驱动程序,驱动下载链接。
安装驱动之后,如何验证驱动是否安装成功?先将CanMV-K230开发板按照6.2.1.2图示连接,然后将连接电源的type c连接线连接到PC USB口,可以发现两个USB串口设备,如下图所示:
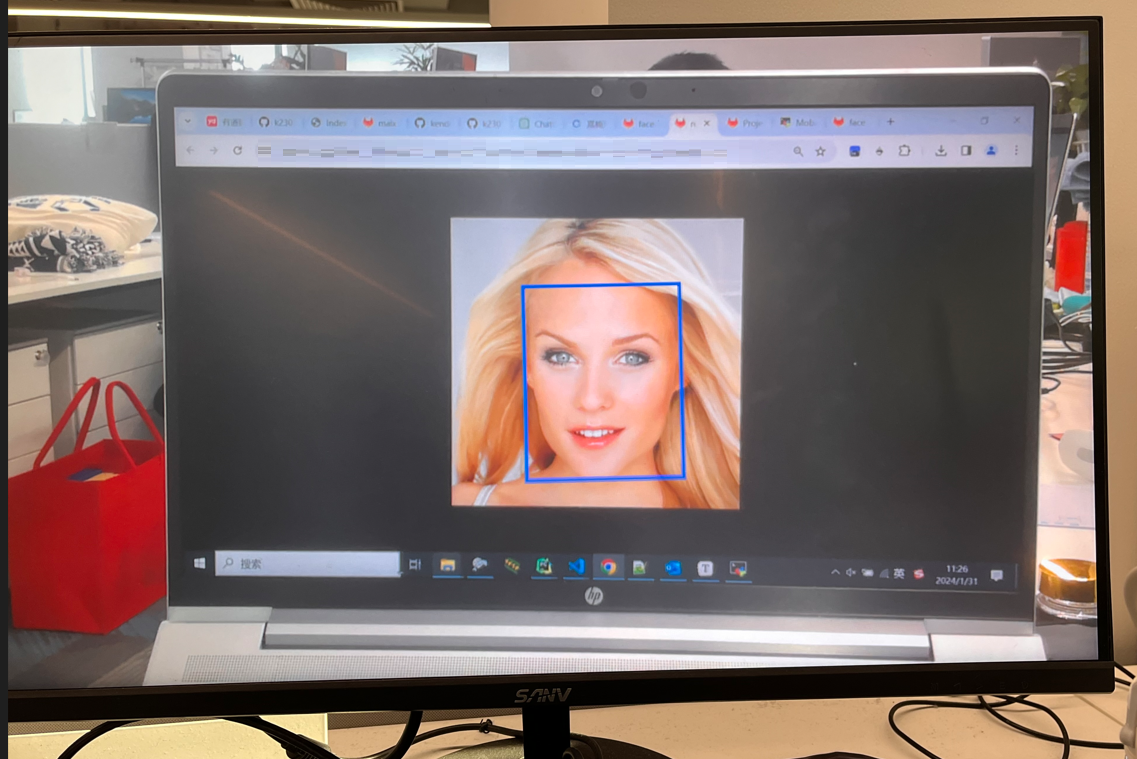
同时HDMI连接的显示器会显示人脸检测结果。
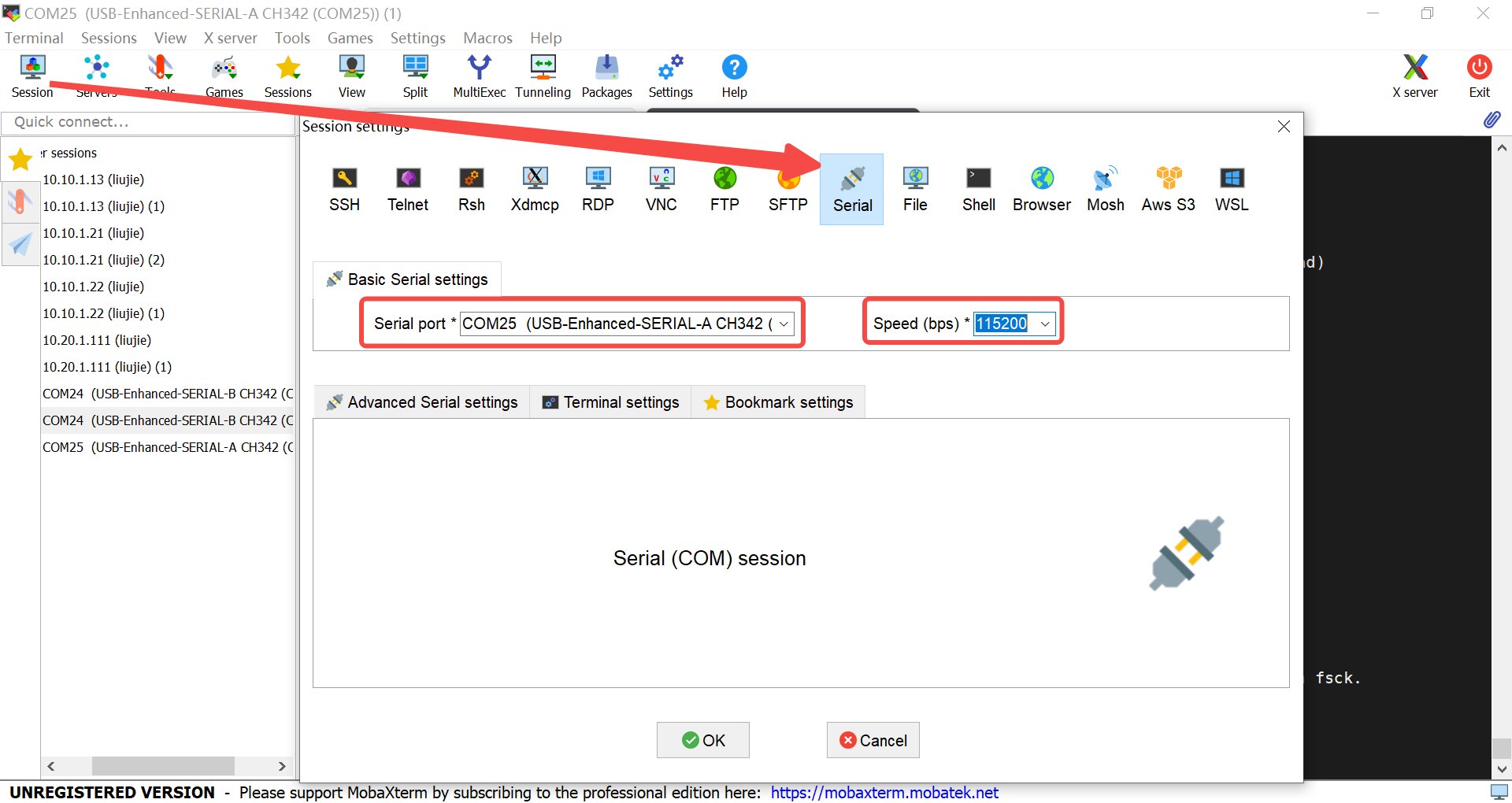
6.2.1.5 串口调试
安装完驱动之后,下载串口调试工具,安装之后,创建串口窗口。
连接小核:对于AI Demo来说,小核主要负责网络相关工作。
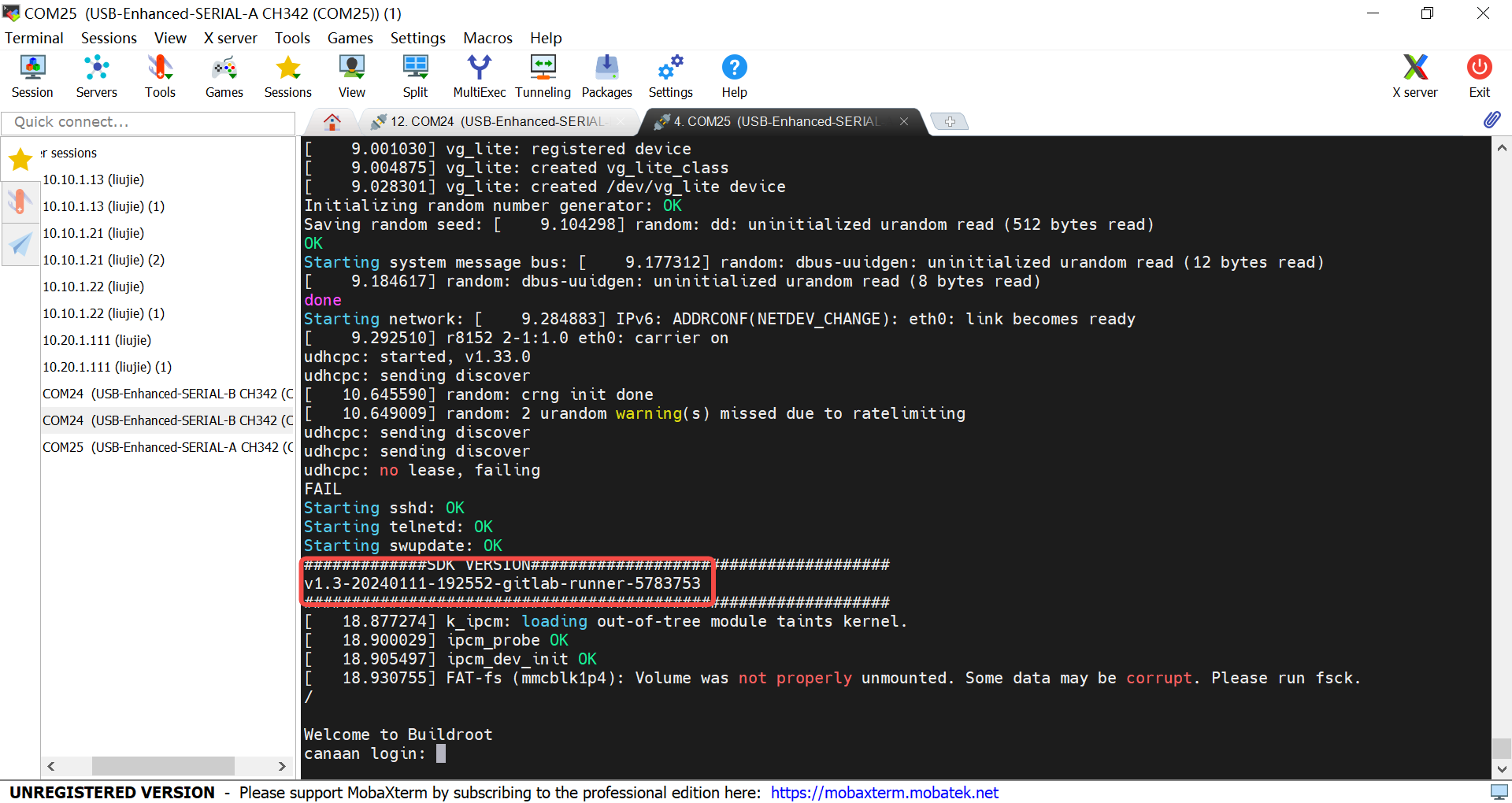
输入root登录,进入小核
连接大核:大核主要负责和AI相关工作
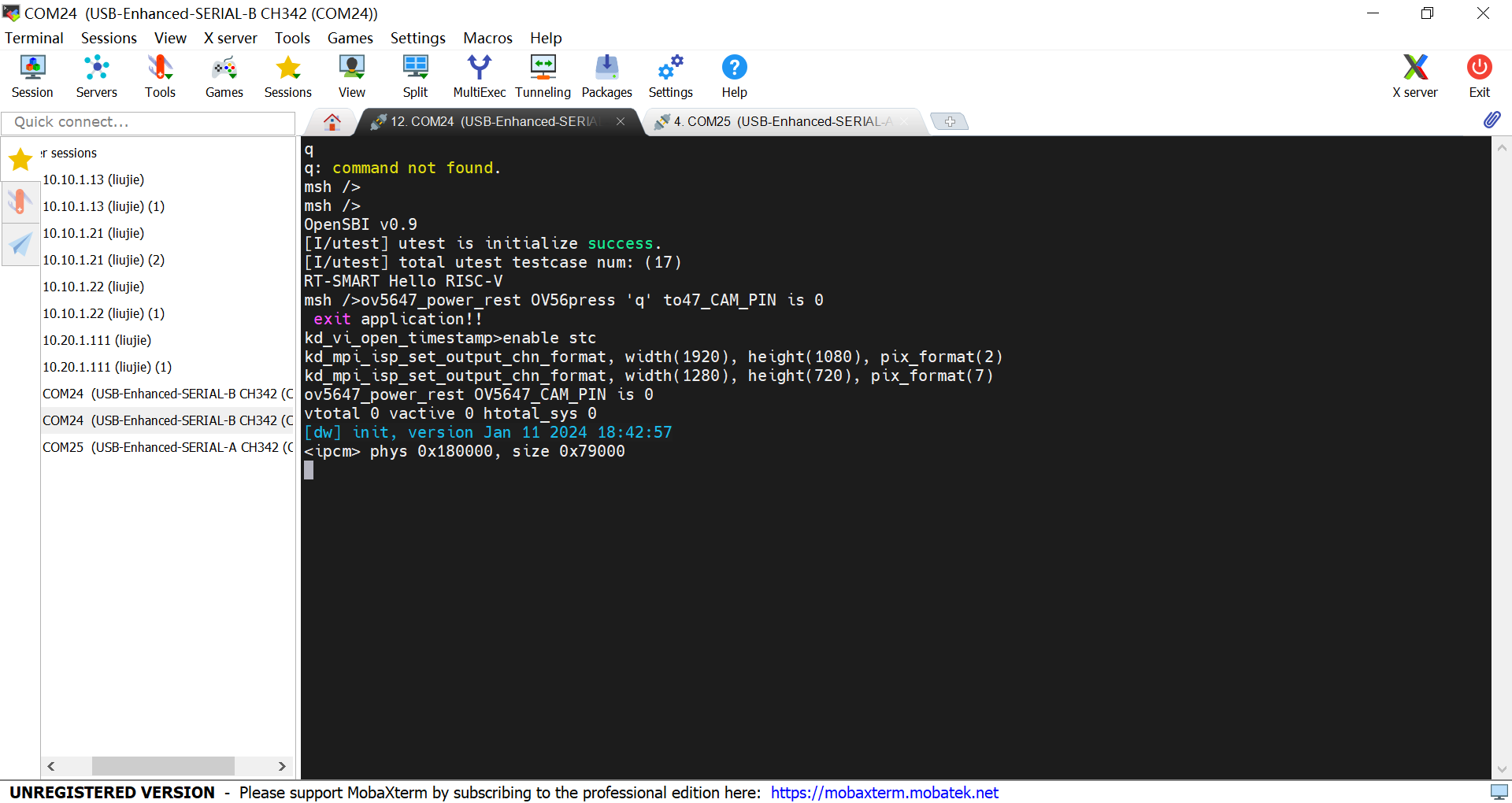
按q,回车,退出当前人脸检测demo。
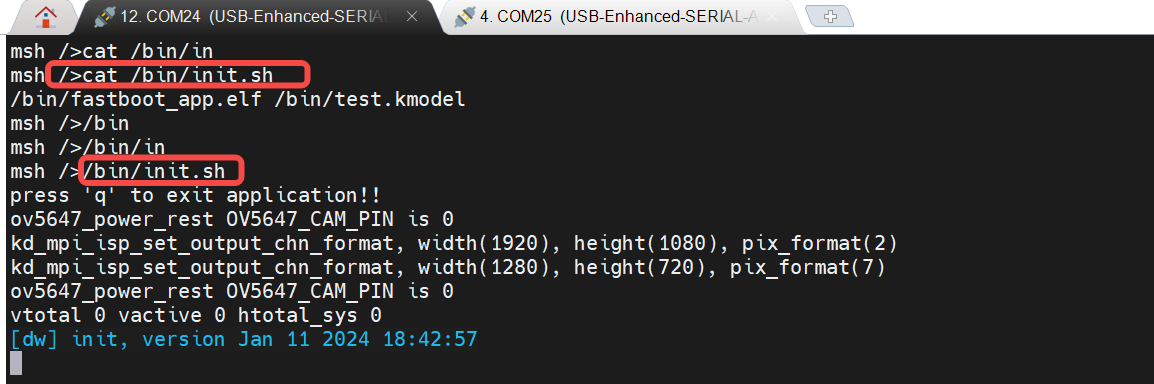
如何重新启动人脸检测demo?
6.2.2 编译环境搭建
编译环境搭建涉及sdk、nncase,sdk和nncase有一定的对应关系。我们今天以sdk v1.3.0,nncase v2.7.0为例,进行讲解。k230 sdk和nncase版本的对应关系请参考下述链接:
K230 SDK nncase版本对应关系 — K230 文档 (canaan-creative.com)
6.2.2.1 docker容器构建
#以sdk v1.3为例,搭建软件环境
git clone -b v1.3 https://github.com/kendryte/k230_sdk
cd k230_sdk
make prepare_sourcecode
#手动构建名为v1.3_0219的docker image
docker build -f tools/docker/Dockerfile -t v1.3_0219 tools/docker
#创建名�为v1.3_0219_lj的docker容器
docker run -u root --name v1.3_0219_lj -it -v $(pwd):$(pwd) -v $(pwd)/toolchain:/opt/toolchain -w $(pwd) v1.3_0219 /bin/bash
注意:
(1)make prepare_sourcecode 会自动下载Linux和RT-Smart toolchain, buildroot package, AI package等. 请确保该命令执行成功并没有Error产生,下载时间和速度以实际网速为准。
以CanMV-K230开发板为例,手动构建镜像(或直接用官网提供v1.3 CanMV-K230镜像):
make CONF=k230_canmv_defconfig #生成镜像sysimage-sdcard.img.gz
#ls k230_sdk/output/k230_canmv_defconfig/images/
drwxr-xr-x 4 root root 169 Feb 21 14:57 ./
drwxr-xr-x 6 root root 79 Feb 20 11:53 ../
drwxr-xr-x 5 root root 138 Feb 21 14:57 big-core/
lrwxrwxrwx 1 root root 22 Feb 21 14:57 k230_canmv_sdcard_v1.3_nncase_v2.7.0.img.gz -> sysimage-sdcard.img.gz
drwxr-xr-x 7 root root 4096 Feb 21 14:57 little-core/
-rw-rw-rw- 1 root root 486556160 Feb 21 14:57 sysimage-sdcard.img
-rw-rw-rw- 1 root root 56831464 Feb 21 14:57 sysimage-sdcard.img.gz
6.2.2.2 nncase安装
nncase是一个为 AI 加速器设计的神经网络编译器, 目前支持的AI设备( target)有K230/k210/k510等。nncase主要由4部分组成:
- 编译模型APIs(Python):用于在PC上将神经网络模型(onnx、tflite等)编译为kmodel,即生成kmodel。
- 模拟器APIs(Python):用于在PC上模拟推理kmodel,验证nncase模拟推理结果和原模型(onnx、tflite)的推理结果是否一致,即Simulator验证。
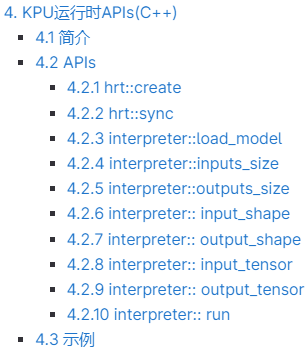
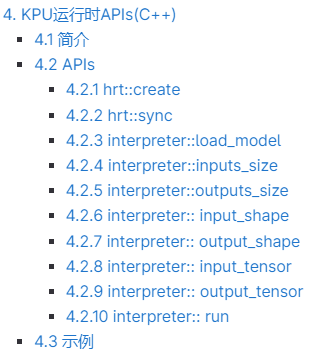
- KPU运行时APIs(C++):用于在AI设备加载kmodel,使用KPU Runtime进行推理, 获取输出数据等,即上板推理验证。
- AI2D 运行时APIs(C++):用于在AI设备配置AI2D的参数,生成相关寄存器配置,执行AI2D计算等;常用AI2D计算包括Affine、Crop、Resize、Padding等,可以加速图像的预处理操作,即上板预处理。
#以sdk v1.3为例
#nncase发布版本:https://github.com/kendryte/nncase/releases
#在docker容器中,查看sdk对应的nncase版本
cat src/big/nncase/riscv64/nncase/include/nncase/version.h
#安装对应版本nncase
pip install -i https://pypi.org/simple nncase==2.7.0
pip install nncase-kpu==2.7.0
6.3 demo构建流程解析
上一章中,我们展示了人脸检测demo,那如何基于K230开发自己的AI Demo。接下来以人脸检测、人脸识别Demo为例,对基于K230的AI开发流程进行详细的描述。
由于我找的这两个Demo是基于Pytorch训练的,因此整体的流程以Pytorch为例,进行展开。针对Pytorch,基于K230的AI开发流程由训练和部署两个部分组成,其中训练包括Pytorch训练模型,部署包括PyTorch到ONNX转换、使用ONNXRuntime进行推理、ONNX到kmodel转换、使用K230Runtime进行推理。
- PyTorch训练模型:
- 使用PyTorch框架定义并训练人脸检测和人脸识别模型。训练完成后,保存模型参数到.pth文件。
- PyTorch到ONNX转换:
- 利用PyTorch工具,将训练好的模型转换为ONNX格式。这一步会针对网络结构进行一些优化。
- 使用ONNXRuntime进行推理:
- 在PC上加载ONNX模型,并利用ONNXRuntime进行推理,以验证onnx模型的正确性和性能。ONNXRuntime推理的主要流程包括预处理、运行、后处理。
- ONNX到kmodel转换:
- 利用K230支持的转换工具,将ONNX模型转换为K230可用的kmodel格式。这一步会优化模型以适应K230,生成在K230上能高效运行的模型。
- 使用K230Runtime进行推理:
- 在K230上加载kmodel,使用K230Runtime进行推理。这确保模型在K230的运行效果。K230Runtime推理的主要流程包括预处理、运行、后处理。
整个流程通过将PyTorch模型经由ONNX中间格式,最终优化为适合K230的kmodel格式,实现了从PC端到K230的无缝部署。从pth/ckpt->onnx->kmodel,模型文件有3种文件格式,各种文件格式推理流程一一对应,因此转换完成后,我们需要在对应的推理流程下,验证转换模型的准确性。
demo构建的完整代码已发布到github上,感兴趣者可以自行下载。
#运行环境:常规pc环境
├── onnx_related
├── onnx_export #导出onnx
│ ├── face_detection_convert_to_onnx.py #对应3.1.1
│ ├── face_recognition_convert_to_onnx.py
│ └── readme.txt
└── onnx_inference #onnx推理流程
├── face_detection #人脸检测onnx推理流程 #对应3.1.2
└── face_recognition #人脸识别onnx推理流程
# 编译环境:k230 docker编译环境,运行环境:K230开发板
├── kmodel_related
│ ├── kmodel_export #导出kmodel,
│ │ ├── build_model.sh #生成kmodel脚本
│ │ ├── face_detection #对应3.1.3+3.1.4.1(两者都是python写的,为了写起来简单,把两者放在一起,逻辑上放到3.1.4更好)
│ │ ├── face_recognition
│ │ ├── k230_kmodel #生成kmodel
│ │ └── k230_utils #生成其它辅助文件,bin、图片等
│ └── kmodel_inference #kmodel推理
│ ├── build_app.sh #生成可执行文件脚本
│ ├── cmake
│ ├── CMakeLists.txt
│ ├── face_detection #人脸检测kmodel推理流程,对应3.1.4.2+3.1.4.3(两者都是c++写的)
│ ├── face_recognition #人脸识别kmodel推理流程
│ ├── k230_bin #生成的可执行文件、kmodel,上板执行脚本等
│ ├── main_nncase #kmodel上板验证工具
│ ├── shell
│ └── test_demo
6.3.1 人脸检测demo
人脸检测是指对于任意一幅给定的图像,采用一定的策略对其进行搜索以确定其中是否含有人脸,如果有则返回人脸检测框、五官关键点。参考链接:biubug6/Pytorch_Retinaface

6.3.1.1 PyTorch到ONNX转换
选择人脸检测模型时,一般应选择轻量化的模型,backbone一般小于resnet50参数量较好。因此我们选择基于MobileNetV1的RetinaFace 作为人脸检测模型。
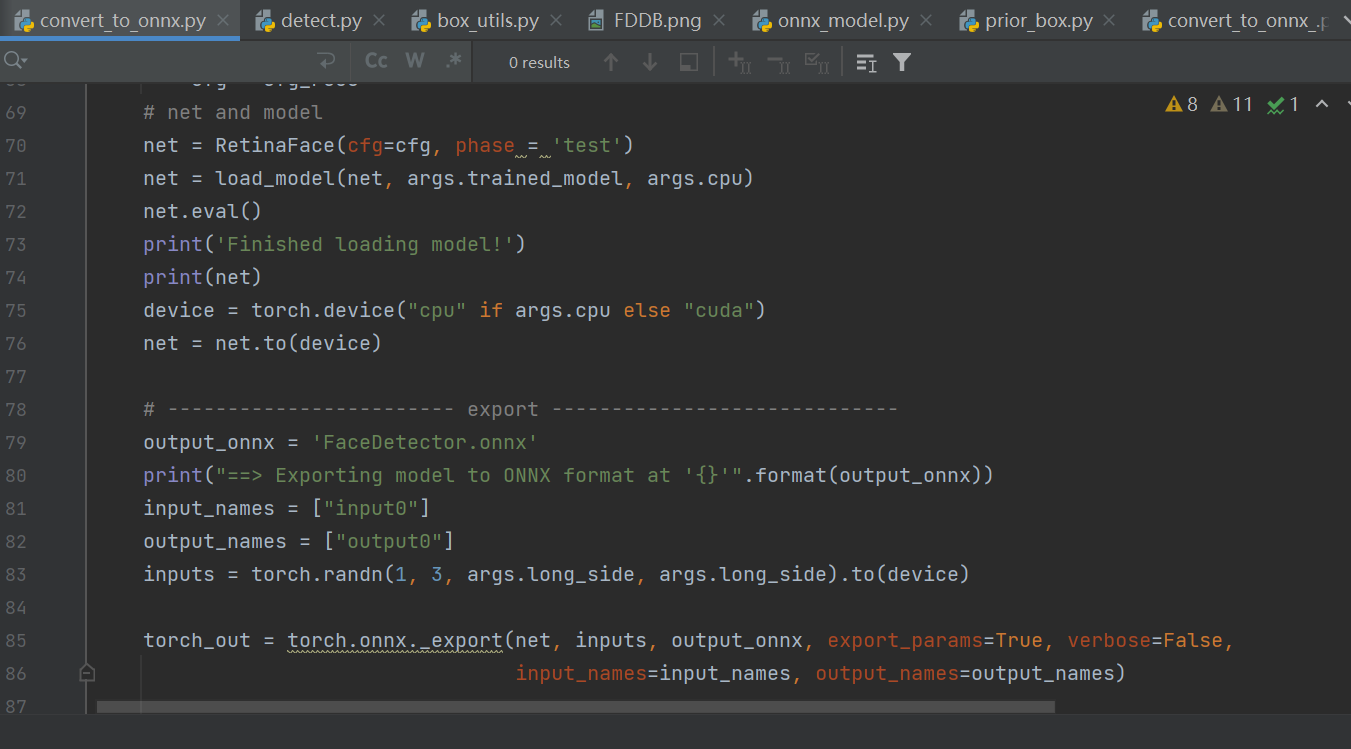
- 加载pth或ckpt模型到cpu
- 构建随机模型输入
- 导出onnx模型
注:pth、onnx都支持动态输入,而K230的模型暂时不支持动态输入,所以导出onnx时,onnx输入shape固定。
执行步骤:
将代码clone到pc上,安装依赖库,执行转onnx脚本。
git clone https://github.com/JayL323/K230_AI_Demo_Development_Process_Analysis/
cd K230_AI_Demo_Development_Process_Analysis
cd onnx_related/onnx_export
git clone https://github.com/biubug6/Pytorch_Retinaface
cp face_detection_convert_to_onnx.py Pytorch_Retinaface/
cd Pytorch_Retinaface
#根据Pytorch_Retinaface说明文档下载预训练模型
python face_detection_convert_to_onnx.py
6.3.1.2 使用ONNXRuntime进行推理
为了验证onnx正确性,我们需要使用ONNXRuntime对onnx进行推理,推理时保证读取图片、预处理、run、后处理、显示结果与pth/ckpt的推理流程一致。
6.3.1.2.1 读取图像
#ori_img(1024,624,3),opencv读入图片的默认格式为hwc,bgr
ori_img = cv2.imread('bin/test.jpg')
6.3.1.2.2 图像预处理
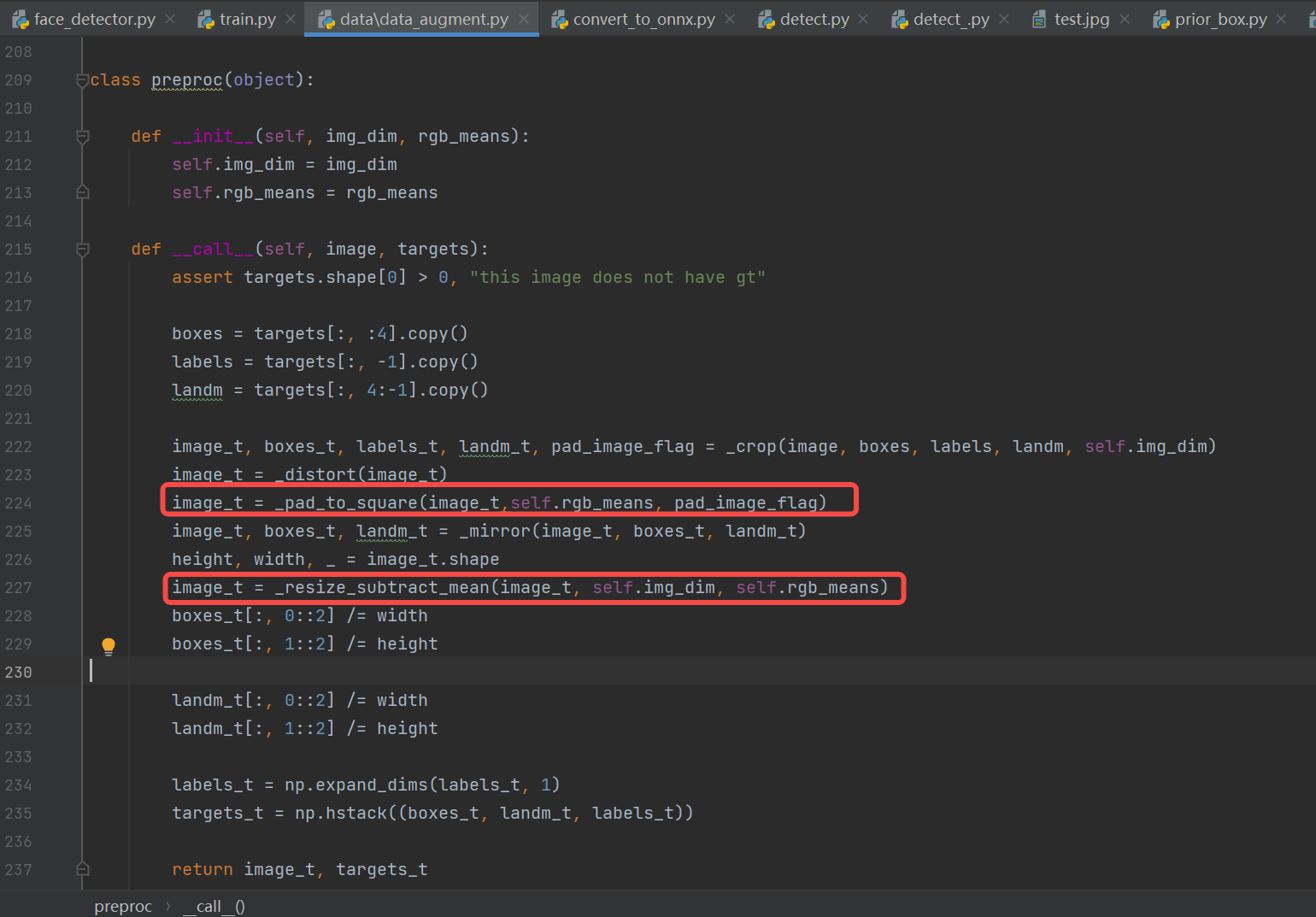
预处理构建(常用的方法:padding_resize,crop_resize,resize,affine、normalization):参考train.py,test.py、predict.py、现成的onnx推理脚本。
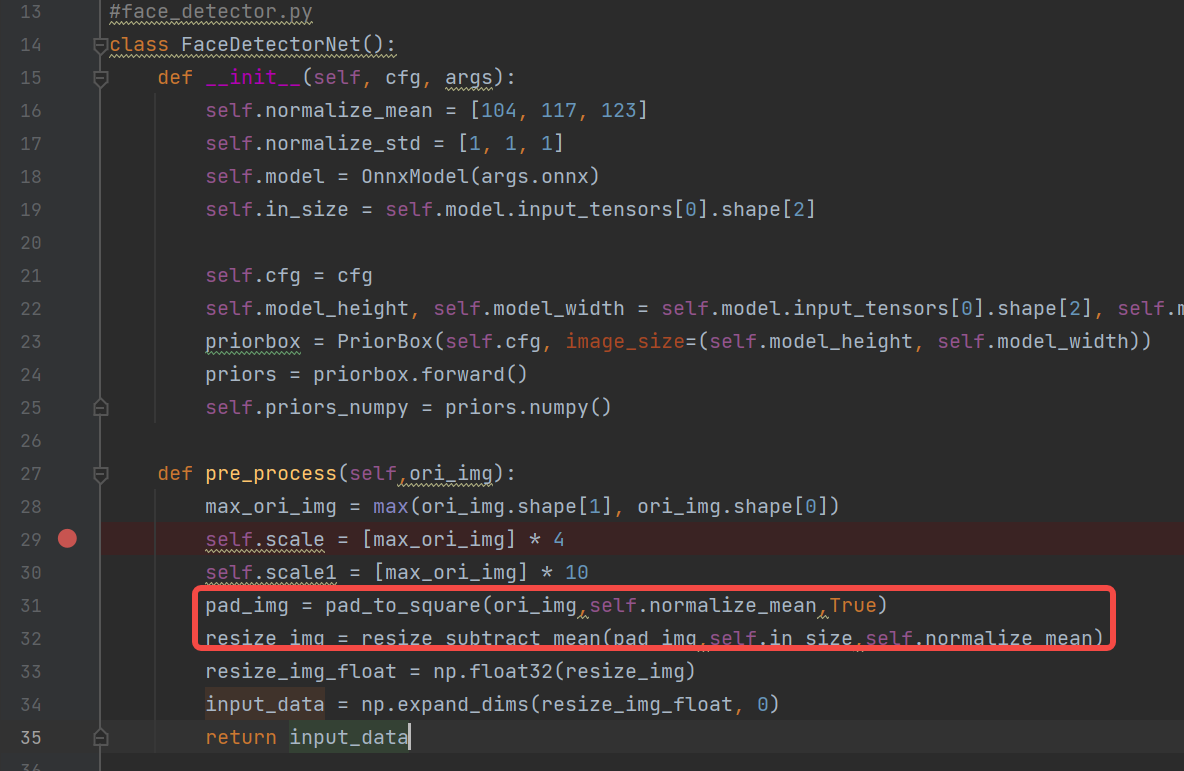
构建人脸检测预处理代码:
#face_detector.py
def pre_process(self,ori_img):
max_ori_img = max(ori_img.shape[1], ori_img.shape[0])
self.scale = [max_ori_img] * 4
self.scale1 = [max_ori_img] * 10
# (1) padding:将原图padding为正方形,pad_img(1024,1024,3)
pad_img = pad_to_square(ori_img,self.normalize_mean,True)
# (2) resize+tranpose+normalization:将padding之后的图像缩放到640,hwc转chw,并归一化,resize_img(3,640,640)
resize_img = resize_subtract_mean(pad_img,self.in_size,self.normalize_mean)
# (3) dequantize:将缩放的图像转换为float32,resize_img_float(3,640,640)
resize_img_float = np.float32(resize_img)
#(4)3维扩张为4维:input_data(1,3,640,640)
input_data = np.expand_dims(resize_img_float, 0)
return input_data
**参考:(与pth预处理流程一致)**人脸检测预处理代码参考train.py(k230模型的输入shape目前只支持固定输入,训练时都是批量固定输入的,因此可以借鉴)中调用的预处理,去掉不适合推理使用的crop、distort、mirror(数据增强),只留下onnx推理时必要的pad_to_square、resize_subact_mean处理,保证onnx与pth预处理一致。
6.3.1.2.3 onnx run
将预处理好的数据,喂给模型,得到onnx推理结果
#onnx_model.py
def forward(self, image_tensor):
'''
image_tensor = image.transpose(2, 0, 1)
image_tensor = image_tensor[np.newaxis, :]
onnx_session.run([output_name], {input_name: x})
:param image_tensor:
:return:
'''
input_feed = self.get_input_feed(image_tensor)
output = self.sess.run(self.out_names, input_feed=input_feed)
return output
#face_detector.py
loc,conf,landms = self.model.forward(input_data)
6.3.1.2.4 后处理
后处理构建(常用的方法:softmax、loc解码、nms等):参考test.py或predict.py等测试脚本、现成的onnx推理脚本。
构建人脸检测后处理代码:包括解码、nms等,由于后处理较多,我们只截取部分代码进行说明,具体实现参考源码。
#face_detector.py
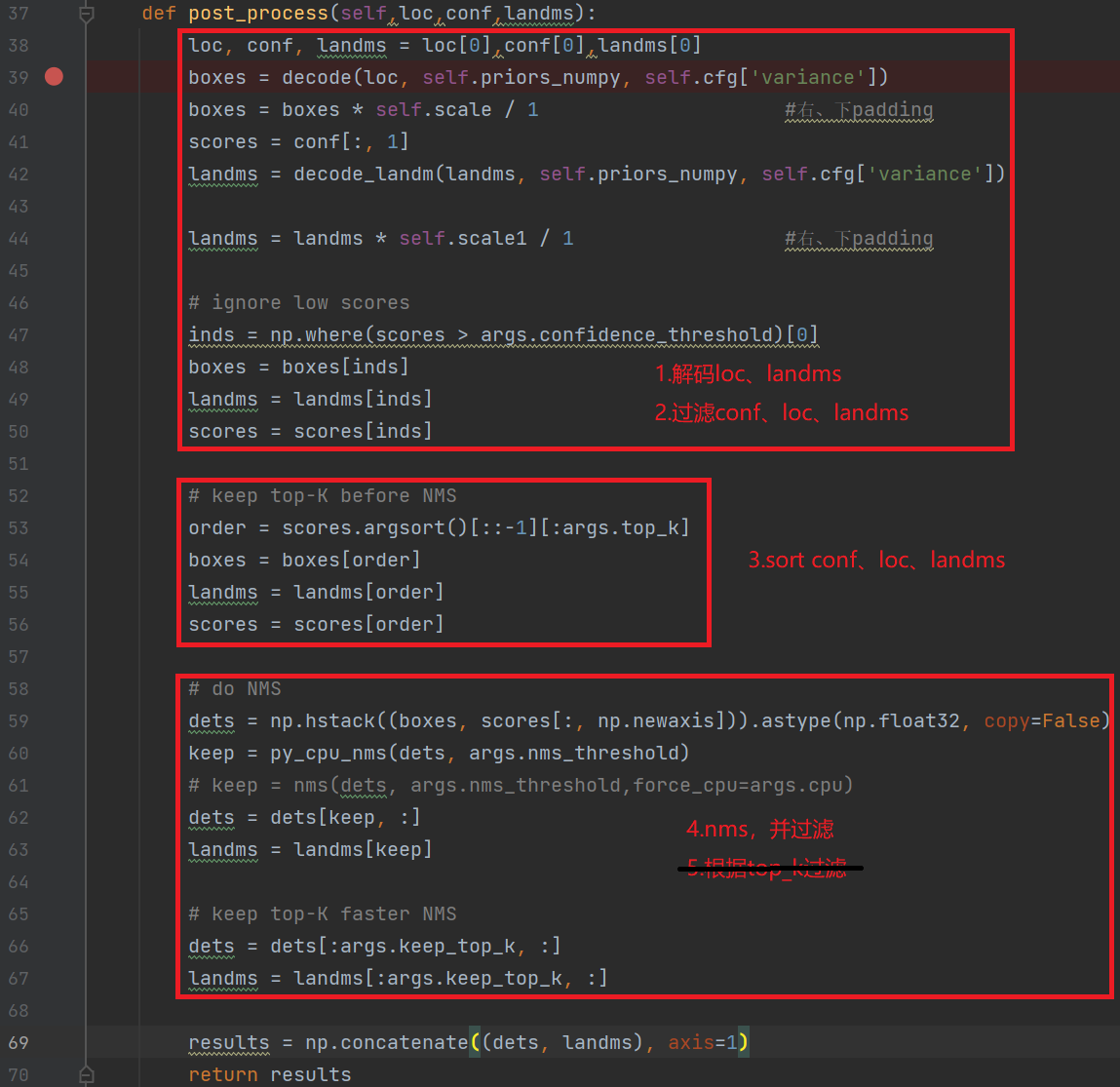
def post_process(self,loc,conf,landms):
loc, conf, landms = loc[0],conf[0],landms[0]
boxes = decode(loc, self.priors_numpy, self.cfg['variance'])
boxes = boxes * self.scale / 1 #右、下padding
......
**参考:**人脸检测repo的detect.py,对模型输入结果:loc(检测框)、conf(得分)、landms(关键点)进行后处理,进而得到人脸检测框、得分、五官点。 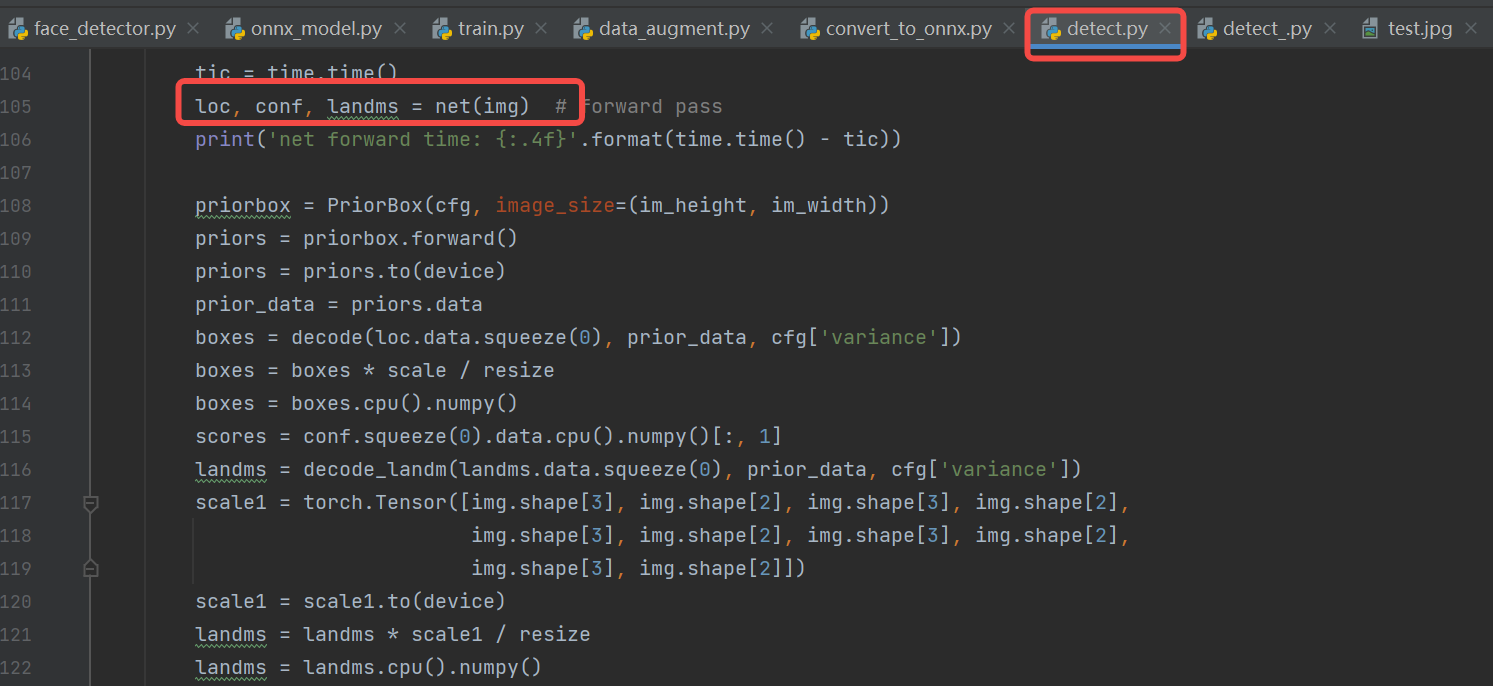
6.3.1.2.5 显示结果
显示结果:将后处理之后的结果画到原图,具体实现参考源码。
6.3.1.2.6 编译执行
将源码clone到pc上,安装依赖库,执行人脸检测推理流程,若是检测效果正确,则说明使用ONNXRuntime推理人脸检测的流程是正确的,转换的onnx也是正确的。
#若已下载code过,请忽略clone步骤
git clone https://github.com/JayL323/K230_AI_Demo_Development_Process_Analysis/
cd K230_AI_Demo_Development_Process_Analysis
cd onnx_related/onnx_inference/face_detection
python face_detector.py

6.3.1.3 ONNX到kmodel转换
人脸检测onnx模型经过nncase编译之后,可以生成在k230上推理的模型kmodel,生成kmodel需要调用nncase的编译模型APIs(Python)。
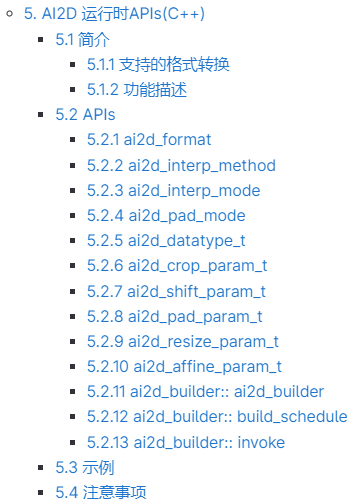
编译模型API的接口如下图所示。若是在github无法看到K230_nncase_开发指南.md文档中目录结构,可以下载到本地,使用Typora工具打开。

6.3.1.3.1 配置生成kmodel参数
1.编译参数:CompileOptions
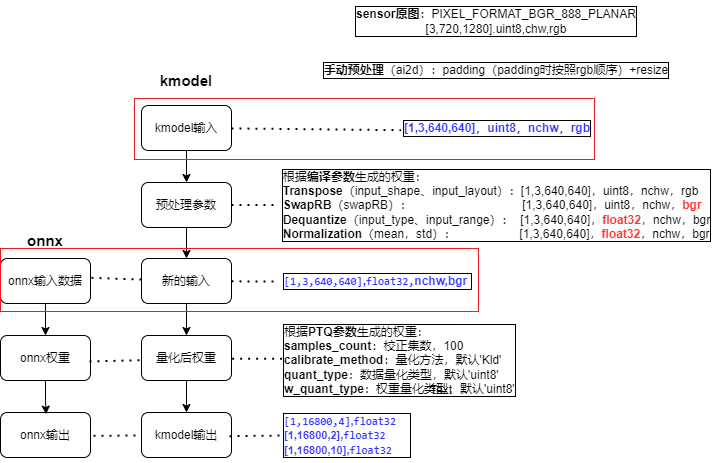
编译参数包括编译目标参数、预处理参数、后处理参数,编译目标参数指定编译目标, 如’cpu’, ‘k230’;常用预处理参数由Transpose参数、SwapRB参数、Dequantize参数、Normalization参数构成;后处理��参数目前只支持Transpose参数。
| 参数类别 | 参数名称 |
|---|---|
| 编译目标参数 | target |
| 预处理参数 | input_shape、input_layout、 swapRB、input_type、input_range、mean、std等 |
| 后处理参数 | output_layout |
编译目标参数:
# 指定编译目标, 如'cpu', 'k230'
compile_options.target = args.target
(1)target = “cpu”,生成cpu上推理的kmodel,此时不进行量化;
(2)target = “k230”,生成在k230(kpu)上推理的kmodel,此时模型进行量化(默认uint8量化);
预处理参数:由于预处理参数比较复杂,接下来我们着重介绍下常用预处理参数。
# 是否开启前处理,默认为False
compile_options.preprocess = True
(1)预处理参数(preprocess = False时,不进行任何预处理,kmodel ≈ onnx)
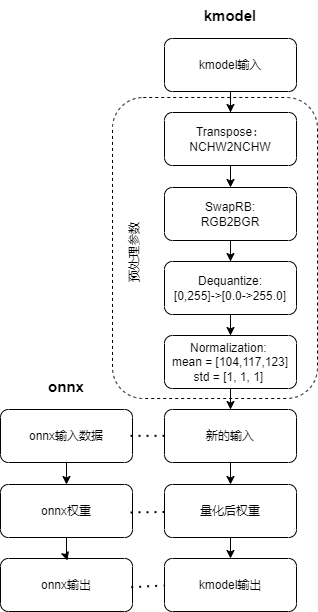
(2)预处理参数(preprocess = True时,kmodel ≈ 预处理 + onnx,此时kmodel包含设置的预处理,这些预处理会在KPU计算,KPU计算较快,因此最好将尽可能多预处理放到kmodel上)
| 预处理操作类型 | 相关参数 |
|---|---|
| Transpose | input_shape、input_layout |
| SwapRB | swapRB |
| Dequantize | input_type、input_range |
| Normalization | mean、std |
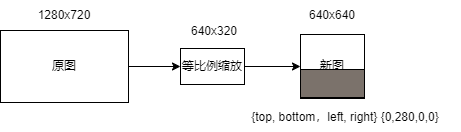
【onnx输入数据】的格式决定了【新的输入】的格式;
【kmodel实际输入】的格式决定了【kmodel输入】的格式;
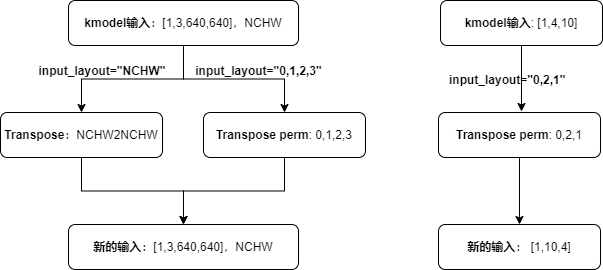
Transpose参数:
# 指定输入数据的shape,input_shape的layout需要与input layout保持一致
compile_options.input_shape = [1, 3, 640, 640]
# 当按照字符串(`"NHWC"`、`"NCHW"`)形式配置 `input_layout`时,表示新的输入数据的layout
compile_options.input_layout = "NCHW"
-
相关参数:
input_shape:输入数据的shape,input_shape的layout需要与input_layout保持一致;当 preprocess为 True时,必须指定。input_layout:支持字符串("NHWC"、"NCHW")和index。当按照字符串("NHWC"、"NCHW")形式配置input_layout时,表示新的输入数据的layout;当按照index形式配置input_layout时,表示输入数据会按照当前配置的input_layout进行数据转置,即input_layout为Transpose的perm参数;当 preprocess为 True时,必须指定。
-
分析说明(以字符串配置格式为例):
-
新的输入layout与input_layout一致;新的输入layout与onnx输入layout一致;因此input_layout与onnx输入layout一致;
-
当input_layout与kmodel输入layout一致时,kmodel输入经过transpose之后,生成的新的输入仍是与kmodel输入layout一致;
-
当input_layout与kmodel输入layout不一致时,kmodel输入经过transpose之后,变成与input_layout一致的新的输入。
-
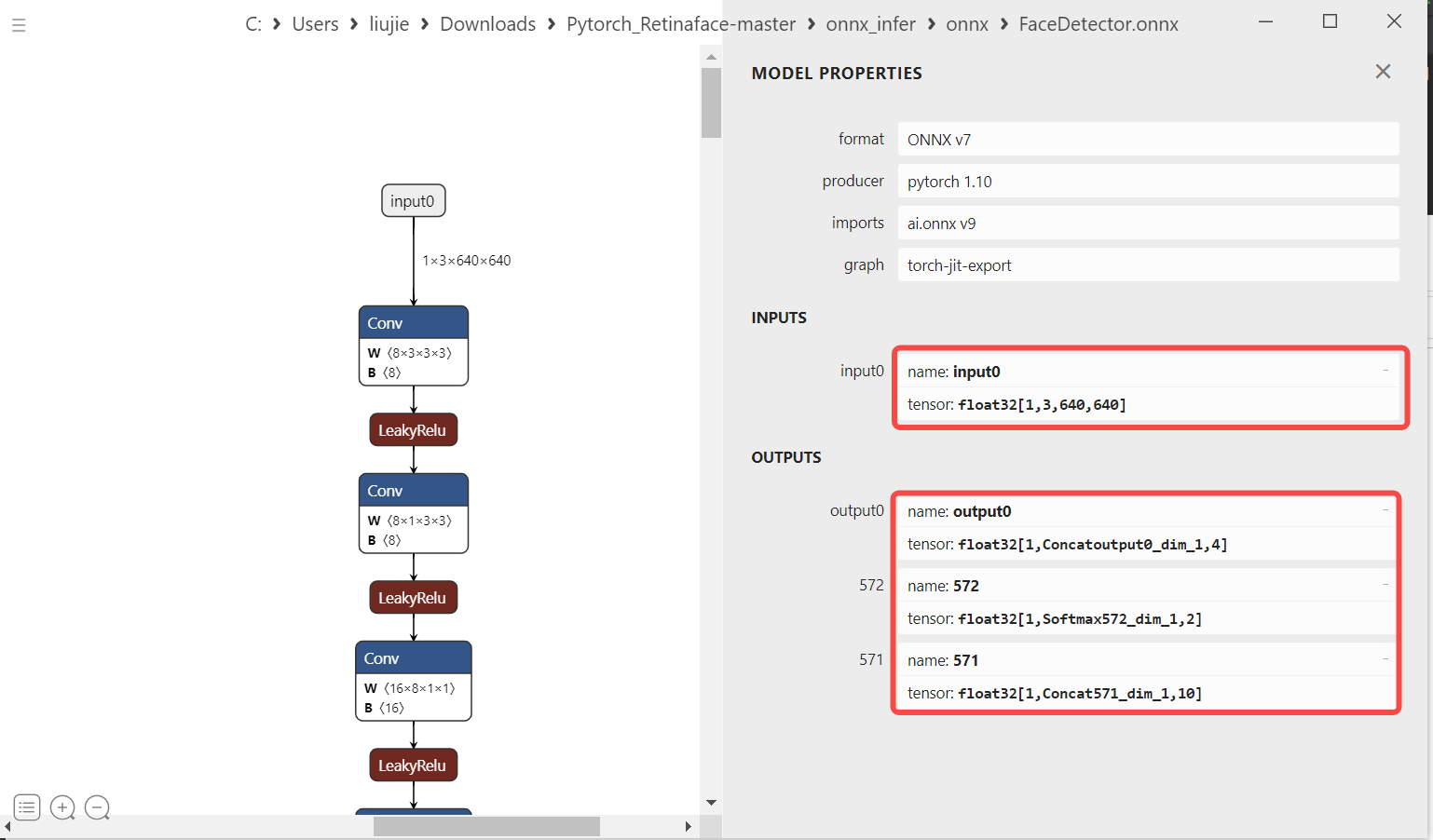
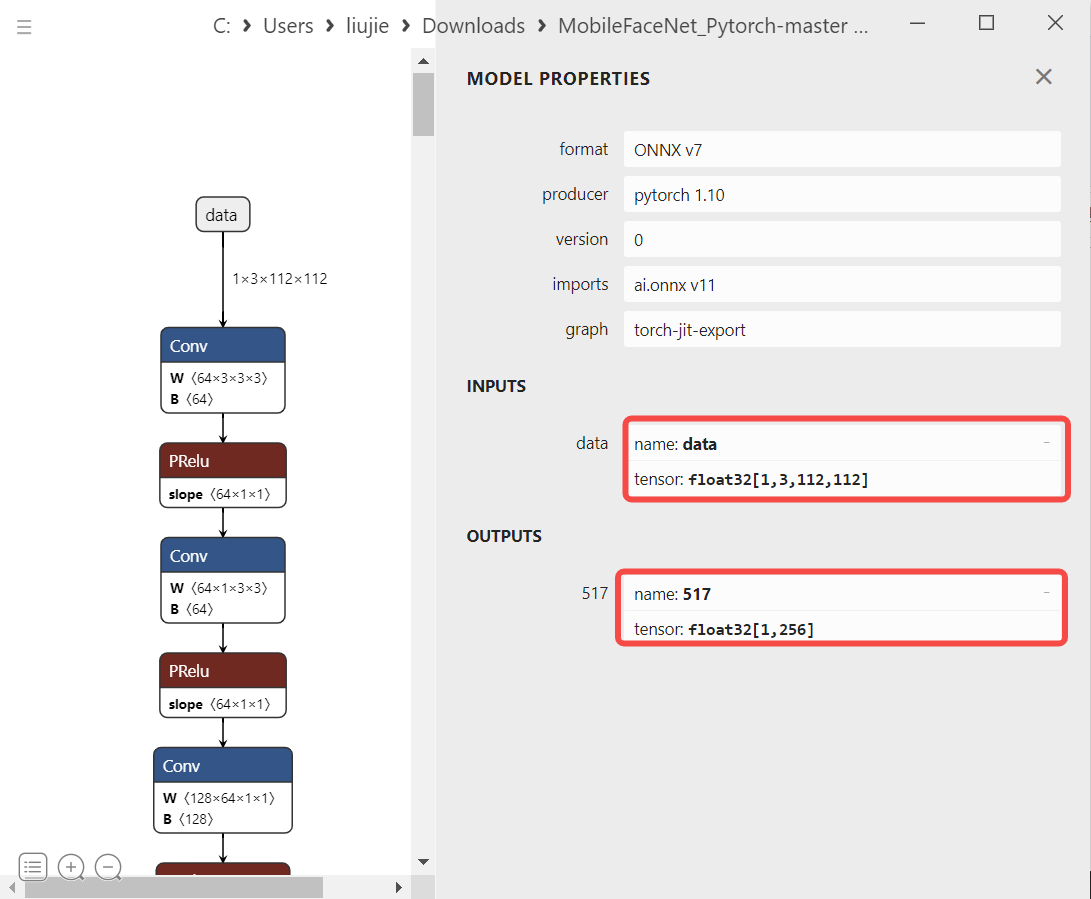
实际推理时,人脸检测onnx输入layout:
NCHW,shape是[1, 3, 640, 640],所以input_layout = "NCHW",input_shape=[1, 3, 640, 640]
-
SwapRB参数:
compile_options.swapRB = True
- 相关参数:
swapRB:是否在channel维度反转数据,默认为False
- 分析说明:
- 实际推理时,人脸检测kmodel输入:
rgb、onnx输入(新的输入):bgr,两者顺序不同,所以需要反转channel维度,故swapRB = True
- 实际推理时,人脸检测kmodel输入:
Dequantize参数:
# 当preprocess为 True时,必须指定为"uint8"或者"float32"
compile_options.input_type = 'uint8'
# input_type=‘uint8’时反量化有效,反量化之后的数据范围
compile_options.input_range = [0, 255]
- 相关参数:
input_type:与kmodel实际输入数据类型一致;当 preprocess为 True时,必须指定为”uint8”或者”float32。input_range:指定输入数据反量化后的浮点数范围;当preprocess为True且input_type为uint8时,必须指定。
- 分析说明:
- 若kmodel
input_type为float32,不进行反量化 - 若kmodel
input_type为uint8,range为[0,255],当input_range为[0,255]时,则反量化的作用只是进行类型转化,将uint8的数据转化为float32 - 若kmodel
input_type为uint8,range为[0,255],当input_range为[0,1],则反量化会将定点数转化为[0.0,1.0]的浮点数 - 实际推理时,人脸检测kmodel实际输入从sensor中获取,数据类型为
uint8,所以input_type = 'uint8',input_range = [0,255]或[0,1]均可
- 若kmodel
Normalization参数:
- 相关参数
mean:预处理标准化参数均值,默认为[0,0,0]std:预处理标准化参数方差,默认为[1,1,1]

- 实际推�理时,人脸检测onnx的
mean = [104,117,123],std = [1, 1, 1];显然上图左边的设置更加简洁,人脸检测kmodel的input_range = [0,255],mean = [104,117,123],std = [1, 1, 1]。
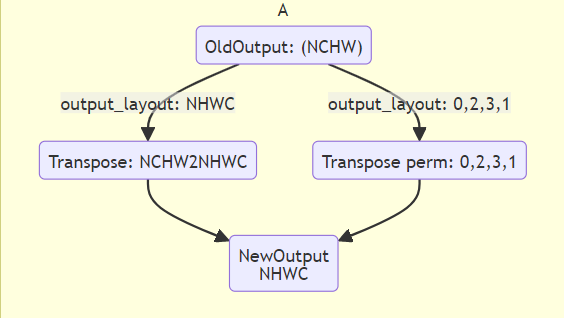
后处理参数:
# 后处理
compile_options.output_layout = "NCHW"
- 相关参数:
output_layout:指定输出数据的layout, 如’NCHW’, ‘NHWC’,默认为“”,不进行transpose。
与预处理参数的input_layout类似,若模型本身输出(oldKmodelOutput)的layout与output_layout相同,则transpose之后,newKmodelOutput layout仍与oldKmodelOutput layout一致;若模型本身输出(oldKmodelOutput)的layout与output_layout不同,则transpose之后,newKmodelOutput layout将变为与output_layout一致。
生成的人脸检测kmodel:
2.导入参数:ImportOptions
ImportOptions类, 用于配置nncase导入选项,很少单独设置,使用默认参数即可。
# 2. 设置导入参数,import_options(一般默认即可)
import_options = nncase.ImportOptions()
model_file = onnx_simplify(args.model, dump_dir)
model_content = read_model_file(model_file)
compiler.import_onnx(model_content, import_options)
3.训练后量化参数:PTQTensorOptions
训练后量化参数(Post Training Quantization,PTQ),PTQ是一种通过将模型权重从float32映射uint8或int16方法,保持模型的准确性的同时,减少推理所需的计算资源;当target = “k230”,PTQ是必选参数,默认uint8量化。
使用uint8量化可以满足人脸检测精度要求,故使用默认uint8量化;校正集个数为100;假设使用100个校正集生成kmodel的时间很久,可以适当的减少校正集。
# 3. 设置训练后量化参数,ptq_options
ptq_options = nncase.PTQTensorOptions()
ptq_options.samples_count = 100
ptq_options.set_tensor_data(generate_data(input_shape, ptq_options.samples_count, args.dataset))
compiler.use_ptq(ptq_options)
6.3.1.3.2 校正集准备
因为生成kmodel时,使用了后处理量化,因此需要准备校正集。使用少量校正集计算量化因子,可以快速得到量化模型。使用该量化模型进行预测,可在保证模型准确性的同时,减少计算量、降低计算内存、减小模型大小。
校正集一般选用验证集的100张图片即可,人脸检测模型的验证集WIDER_val,故选用WIDER_val的100张图像作为校正集。
注:
(1)若是kmodel生成时间很久或者验证集数据很少,也可尝试少于100个数据
(2)generate_data函数,生成的数据格式,需要尽量保证与实际推理时喂给kmodel的数据格式一致,否则会导致生成kmodel有问题��。
def generate_data(shape, batch, calib_dir):
#获取所有校正集图片名称
img_paths = [os.path.join(calib_dir, p) for p in os.listdir(calib_dir)]
data = []
for i in range(batch):
assert i < len(img_paths), "calibration images not enough."
#生成的数据需要做的预处理 ≈ onnx预处理 - 根据预处理参数设置的,包含在kmodel中预处理
#onnx预处理:bgr,padding,reisze,transpose,normalization,dequantize,3维度转4维度
#kmodel中包含的预处理:rgb->bgr,dequantize,normalization
img_data = Image.open(img_paths[i]).convert('RGB')
#为了省事,这里没有用padding
img_data = img_data.resize((shape[3], shape[2]), Image.BILINEAR)
img_data = np.asarray(img_data, dtype=np.uint8)
img_data = np.transpose(img_data, (2, 0, 1))
data.append([img_data[np.newaxis, ...]])
return np.array(data)
input_shape = [1, 3, 640, 640]
......
ptq_options = nncase.PTQTensorOptions()
ptq_options.samples_count = 100
# 校正集数据预处理,将原图处理为kmodel需要数据
ptq_options.set_tensor_data(generate_data(input_shape, ptq_options.samples_count, args.dataset))
# 使用100个校准数据计算量化因子
compiler.use_ptq(ptq_options)
......
6.3.1.3.3 生成kmodel
生成人脸检测kmodel完整代码示例:mobile_retinaface_data_100_640.py
生成环境:6.2.2 构建的编译环境
生成步骤:
cd src/reference
#若已下载code过,请忽略clone步骤
git clone https://github.com/JayL323/K230_AI_Demo_Development_Process_Analysis/
cd K230_AI_Demo_Development_Process_Analysis
cd kmodel_related/kmodel_export
./build_model.sh
-rw-r--r-- 1 root root 715216 Feb 28 16:08 face_detect_640.kmodel #人脸检测kmodel
温馨提示:生成kmodel时需要配置多个参数,正确理解和配��置这些参数是确保成功生成kmodel的关键。我们深知参数配置的复杂性,但是为了给用户提供正确的参数配置,我们一次性提供了所有正确的配置,但对于不太熟悉kmodel生成的用户来说,仍然存在配置错误的可能性。错误的参数配置将导致生成的kmodel存在问题。
为了帮助大家更好地理解这一过程,建议尝试修改配置参数为不同值,观察生成的kmodel的变化和对最终推理结果的影响。通过这样的实践,可以更深入地理解各参数的作用和相互关系。这种方式将使用户更熟悉kmodel生成的流程,有助于更准确地配置参数以获得所需的结果。
6.3.1.4 使用K230Runtime进行推理
为了验证kmodel正确性,我们需要使用K230Runtime对kmodel进行推理,推理时保证读取图片、预处理、run、后处理、显示结果与onnx的对应流程一致。
由于K230开发板调试起来比较复杂,因此我们提供一些辅助工具,并分享相关经验来帮助用户验证K230端推理的正确性。由于推理过程中,主要的部分是run、预处理、后处理,接下来我们分别对这3个部分调试的常用方法进行说明。
run:
- Simulator:在PC端模拟kmodel在k230的推理过程,用于对比kmodel和onnx输出是否一致;
- main_nncase:在K230端推理kmodel,用于对比模拟推理kmodel与实际推理kmodel结果是否一致;
- 若是两者都没有问题��,则说明生成kmodel是正确的。
预处理:
- 原图预处理之后,dump预处理后的图像,查看预处理是否正确。
后处理:
- 在Simulator正确的情况下,将Simulator输出bin文件作为kmodel输出,喂给后处理,看后处理结果是否与ONNX后处理结果是否一致。
6.3.1.4.1 使用Simulator验证kmodel
Simulator:在PC端模拟kmodel在k230的推理过程,用于对比kmodel和onnx输出是否一致;
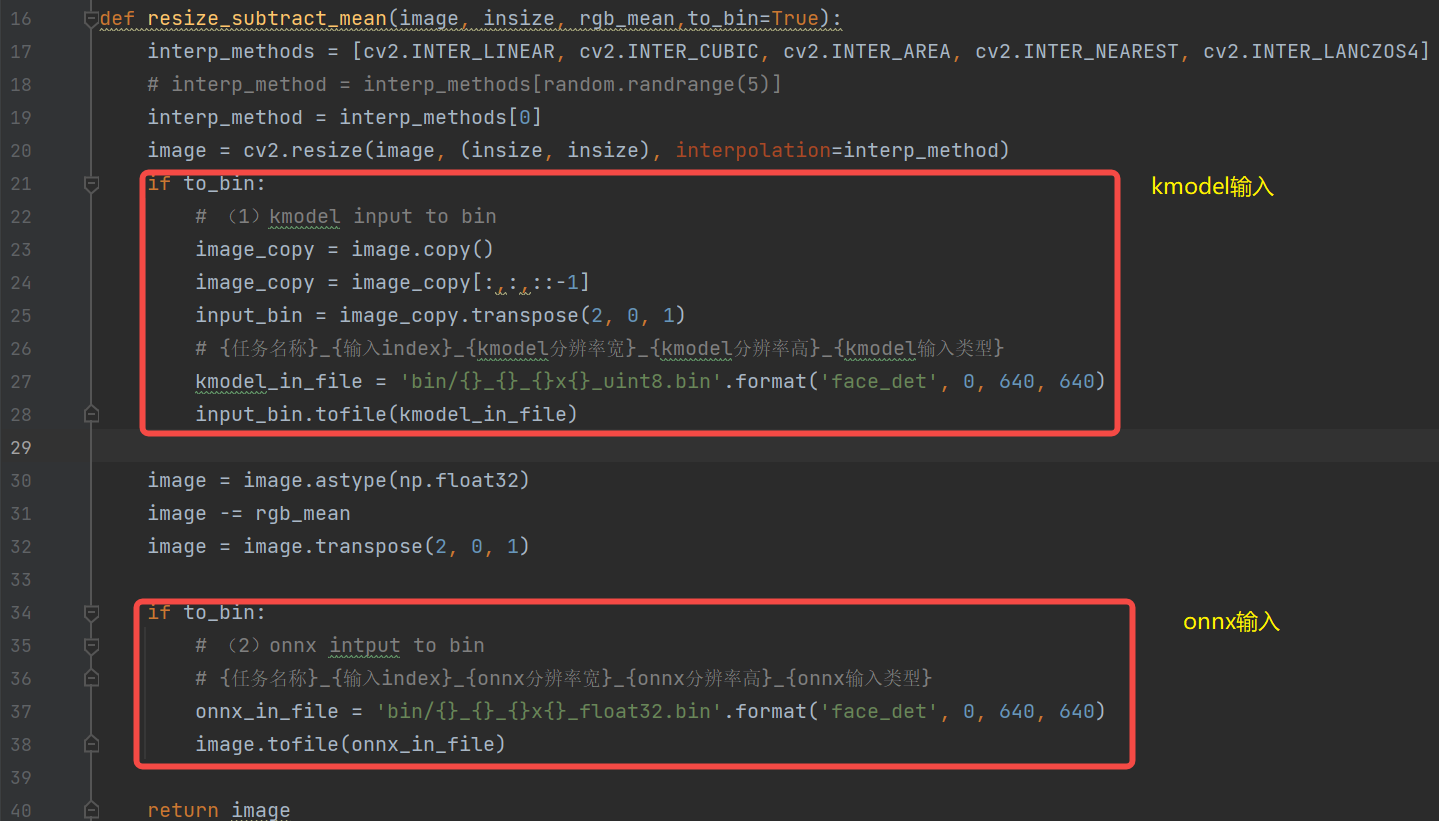
1.生成input.bin
在使用Simulator验证kmodel之前,需要先准备好输入文件。由于kmodel包括部分预处理,因此对于同一张图片,需要分别利用不同预处理生成onnx_input.bin、kmodel_input.bin。
| 名称 | onnx_input.bin构建流程 | kmodel_input.bin构建流程 |
|---|---|---|
| 源->目标 | (uint8,hwc,bgr->float32,nchw,bgr) | (uint8,hwc,bgr->uint8,nchw,rgb) |
| 原图 | (1024,624,3),uint8,hwc,bgr | (1024,624,3),uint8,hwc,bgr |
| padding | (1024,1024,3), uint8,hwc,bgr | (1024,1024,3), uint8,hwc,bgr |
| resize | (640,640,3), uint8,hwc,bgr | (640,640,3), uint8,hwc,bgr |
| dequantize | (640,640,3), float32,hwc,bgr | — |
| normalization | (640,640,3),float32,hwc,bgr | — |
| bgr->rgb | — | (640,640,3), uint8,hwc,rgb |
| transpose | (3,640,640),float32,chw,bgr | (3,640,640),uint8,chw,rgb |
| 维度扩展(非必须) | (1,3,640,640),float32,chw,bgr | (1,3,640,640),uint8,chw,rgb |
注:由于生成的kmodel中包含部分预处理,生成kmodel_input.bin需要的预处理 ≈ 生成onnx_input.bin需要的预处理 - kmodel中包含的预处理(人脸检测kmodel中预处理transpose、dequantize、normalization、swapRB)
(1)维度扩展可以省略(读取时bin文件可以用reshape,生成bin时可以省略)。
(2)kmodel_input.bin为什么无需进行dequantize、normalization操作?dequantize、normalization已放到kmodel中。
(3)为什么需要生成kmodel_input.bin需要bgr->rgb?生成人脸检测kmode时,由于实际需要,预处理打开了swapRB开关,用于rgb->bgr,对应的,生成kmodel_input.bin时,则需要先将数据转成rgb顺序;
(4)transpose也放到kmodel中,为什么生成kmodel_input.bin仍需transpose?由于生成kmodel,若是打开了预处理开关,transpose的相关参数必须设置,我们人脸检测kmodel的实际输入是NCHW,input_layout设置为NCHW,两者是一致的,因此transpose是NCHW2NCHW,实际上并没有转换。
生成input.bin的过程:(放在onnx推理的预处理方法中)
2.Simulator验证
模拟器APIs的接口如下图所示。若是在github无法看到K230_nncase_开发指南.md文档中目录结构,可以下载到本地,使用Typora工具打开。
Simulator流程:
对于同一张图片,分别利用不同预处理生成不同的onnx_input.bin、kmodel_input.bin,
- 将onnx_input.bin喂给onnx,经过onnx推理得cpu_results;
- 将kmodel_input.bin喂给kmodel,经过Simulator推理得到nncase_results;
- 计算cpu_results和nncase_results的余弦相似度,通过相似度的大小来判断生成的kmodel是否正确。
# mobile_retinaface_onnx_simu_640.py
import os
import copy
import argparse
import numpy as np
import onnx
import onnxruntime as ort
import nncase
def read_model_file(model_file):
with open(model_file, 'rb') as f:
model_content = f.read()
return model_content
def cosine(gt, pred):
return (gt @ pred) / (np.linalg.norm(gt, 2) * np.linalg.norm(pred, 2))
def main():
parser = argparse.ArgumentParser(prog="nncase")
parser.add_argument("--target", type=str, help='target to run')
parser.add_argument("--model", type=str, help='original model file')
parser.add_argument("--model_input", type=str, help='input bin file for original model')
parser.add_argument("--kmodel", type=str, help='kmodel file')
parser.add_argument("--kmodel_input", type=str, help='input bin file for kmodel')
args = parser.parse_args()
# 1. onnx推理,得到cpu_results
ort_session = ort.InferenceSession(args.model)
output_names = []
model_outputs = ort_session.get_outputs()
for i in range(len(model_outputs)):
output_names.append(model_outputs[i].name)
model_input = ort_session.get_inputs()[0]
model_input_name = model_input.name
model_input_type = np.float32
model_input_shape = model_input.shape
print('onnx_input:',model_input_shape)
model_input_data = np.fromfile(args.model_input, model_input_type).reshape(model_input_shape)
cpu_results = []
cpu_results = ort_session.run(output_names, { model_input_name : model_input_data })
# 2. Simulator推理,得到nncase_results
# create Simulator
sim = nncase.Simulator()
# read kmodel
kmodel = read_model_file(args.kmodel)
# load kmodel
sim.load_model(kmodel)
# read input.bin
input_shape = [1, 3, 640, 640]
dtype = sim.get_input_desc(0).dtype
input = np.fromfile(args.kmodel_input, dtype).reshape(input_shape)
# set input for Simulator
sim.set_input_tensor(0, nncase.RuntimeTensor.from_numpy(input))
# Simulator inference
nncase_results = []
sim.run()
for i in range(sim.outputs_size):
nncase_result = sim.get_output_tensor(i).to_numpy()
# print("nncase_result:",nncase_result)
input_bin_file = 'bin/face_det_{}_{}_simu.bin'.format(i,args.target)
nncase_result.tofile(input_bin_file)
nncase_results.append(copy.deepcopy(nncase_result))
# 3. 计算onnx和Simulator相似度
for i in range(sim.outputs_size):
cos = cosine(np.reshape(nncase_results[i], (-1)), np.reshape(cpu_results[i], (-1)))
print('output {0} cosine similarity : {1}'.format(i, cos))
if __name__ == '__main__':
main()
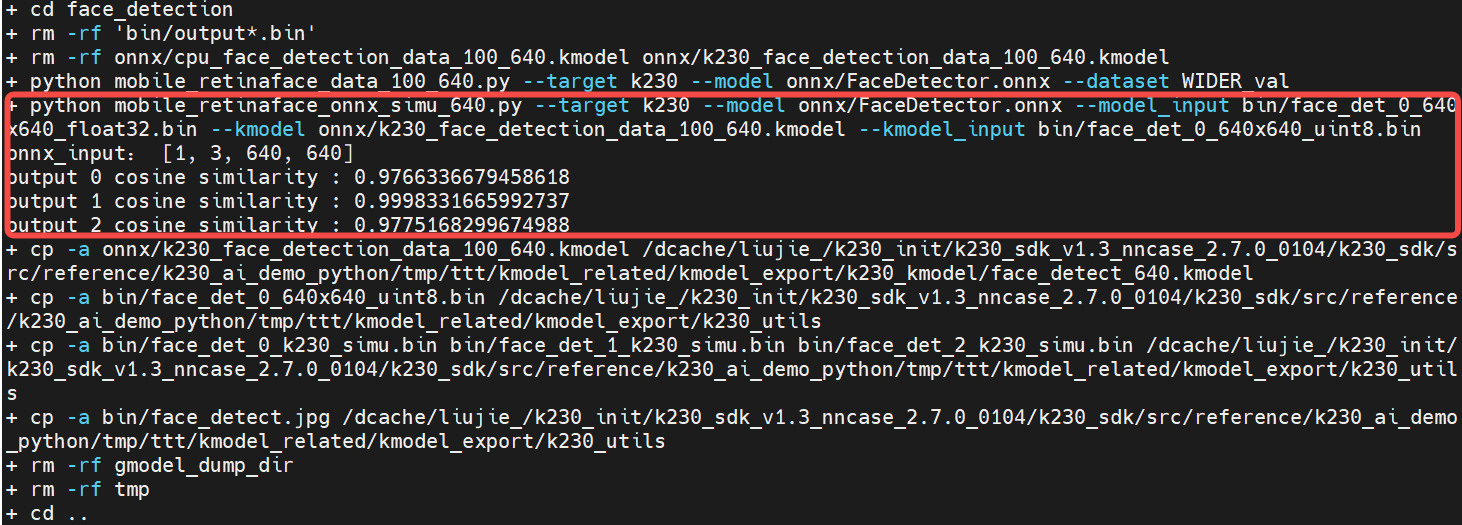
上边的脚本可以满足大部分onnx及其kmodel的对比验证,一般不用太多修改。只需根据模型实际输入大小修改input_shape即可。
python mobile_retinaface_onnx_simu_640.py \
--target k230 --model onnx/FaceDetector.onnx \
--model_input bin/face_det_0_640x640_float32.bin \
--kmodel onnx/k230_face_detection_data_100_640.kmodel \
--kmodel_input bin/face_det_0_640x640_uint8.bin
#若已下载code过,请忽略clone步骤
git clone https://github.com/JayL323/K230_AI_Demo_Development_Process_Analysis/
cd K230_AI_Demo_Development_Process_Analysis
cd kmodel_related/kmodel_export
./build_model.sh
onnx和Simulator余弦相似度越高越好,一般0.99以上即可满足条件;若是达不到0.99,但是在0.95以上,可以通过进一步上板验证来判断生成的kmodel是否满足实际需求。
**注:**在执行simulator时,必须先添加以下环境变量(build_model.sh文件其中��含有)
export NNCASE_PLUGIN_PATH=$NNCASE_PLUGIN_PATH:/usr/local/lib/python3.8/dist-packages/
export PATH=$PATH:/usr/local/lib/python3.8/dist-packages/
source /etc/profile
6.3.1.4.2 使用main_nncase验证kmodel
Simulator推理kmodel和上板推理kmodel一般来说是一致的,但是不排除个别情况下Simulator与实际上板仍有一定差异,为了验证两者是否一致,需要使用main_nncase工具辅助验证Simulator推理kmodel与实际推理kmodel结果是否一致;使用这个工具需要调用nncase的KPU运行时APIs(C++)。
KPU运行时APIs提供kmodel上板推理的各种接口 ,接口如下图所示。若是在github无法看到K230_nncase_开发指南.md文档中目录结构,可以下载到本地,使用Typora工具打开。
main_nncase验证流程(对K230的KPU调用有个大概的印象):
- 加载kmodel
- 设置kmodel输入:读取kmodel_input.bin文件
- 设置kmodel输出
- 推理kmodel
- 获取kmodel输出
- 对比Simulator推理kmodel、上板推理kmodel结果相似性
注:main_nncase工具可以适配所有kmodel的验证,无需自己修改。只需执行时,修改命令行的对应参数即可。
//main_nncase.cc
#include <chrono>
#include <fstream>
#include <iostream>
#include <nncase/runtime/runtime_tensor.h>
#include <nncase/runtime/interpreter.h>
#include <nncase/runtime/runtime_op_utility.h>
using namespace nncase;
using namespace nncase::runtime;
using namespace nncase::runtime::detail;
#define USE_CACHE 1
template <class T>
std::vector<T> read_binary_file(const char *file_name)
{
std::ifstream ifs(file_name, std::ios::binary);
ifs.seekg(0, ifs.end);
size_t len = ifs.tellg();
std::vector<T> vec(len / sizeof(T), 0);
ifs.seekg(0, ifs.beg);
ifs.read(reinterpret_cast<char *>(vec.data()), len);
ifs.close();
return vec;
}
void read_binary_file(const char *file_name, char *buffer)
{
std::ifstream ifs(file_name, std::ios::binary);
ifs.seekg(0, ifs.end);
size_t len = ifs.tellg();
ifs.seekg(0, ifs.beg);
ifs.read(buffer, len);
ifs.close();
}
template <typename T>
double dot(const T *v1, const T *v2, size_t size)
{
double ret = 0.f;
for (size_t i = 0; i < size; i++)
{
ret += v1[i] * v2[i];
}
return ret;
}
template <typename T>
double cosine(const T *v1, const T *v2, size_t size)
{
return dot(v1, v2, size) / ((sqrt(dot(v1, v1, size)) * sqrt(dot(v2, v2, size))));
}
void dump(const std::string &info, volatile float *p, size_t size)
{
std::cout << info << " dump: p = " << std::hex << (void *)p << std::dec << ", size = " << size << std::endl;
volatile unsigned int *q = reinterpret_cast<volatile unsigned int *>(p);
for (size_t i = 0; i < size; i++)
{
if ((i != 0) && (i % 4 == 0))
{
std::cout << std::endl;
}
std::cout << std::hex << q[i] << " ";
}
std::cout << std::dec << std::endl;
}
int main(int argc, char *argv[])
{
std::cout << "case " << argv[0] << " build " << __DATE__ << " " << __TIME__ << std::endl;
if (argc < 4)
{
std::cerr << "Usage: " << argv[0] << " <kmodel> <input_0.bin> <input_1.bin> ... <input_N.bin> <output_0.bin> <output_1.bin> ... <output_N.bin>" << std::endl;
return -1;
}
interpreter interp;
// 1. load model
std::ifstream in_before_load_kmodel("/proc/media-mem");
std::string line_before_load_kmodel;
// 逐行读取文件内容,查看MMZ使用情况
while (std::getline(in_before_load_kmodel, line_before_load_kmodel)) {
std::cout << line_before_load_kmodel << std::endl;
}
std::ifstream ifs(argv[1], std::ios::binary);
interp.load_model(ifs).expect("Invalid kmodel");
std::ifstream in_after_load_kmodel("/proc/media-mem");
std::string line_after_load_kmodel;
// 逐行读取文件内容,查看MMZ使用情况
while (std::getline(in_after_load_kmodel, line_after_load_kmodel)) {
std::cout << line_after_load_kmodel << std::endl;
}
// 2. set inputs
for (size_t i = 2, j = 0; i < 2 + interp.inputs_size(); i++, j++)
{
auto desc = interp.input_desc(j);
auto shape = interp.input_shape(j);
auto tensor = host_runtime_tensor::create(desc.datatype, shape, hrt::pool_shared).expect("cannot create input tensor");
auto mapped_buf = std::move(hrt::map(tensor, map_access_::map_write).unwrap());
#if USE_CACHE
read_binary_file(argv[i], reinterpret_cast<char *>(mapped_buf.buffer().data()));
#else
auto vec = read_binary_file<unsigned char>(argv[i]);
memcpy(reinterpret_cast<void *>(mapped_buf.buffer().data()), reinterpret_cast<void *>(vec.data()), vec.size());
// dump("app dump input vector", (volatile float *)vec.data(), 32);
#endif
auto ret = mapped_buf.unmap();
ret = hrt::sync(tensor, sync_op_t::sync_write_back, true);
if (!ret.is_ok())
{
std::cerr << "hrt::sync failed" << std::endl;
std::abort();
}
// dump("app dump input block", (volatile float *)block.virtual_address, 32);
interp.input_tensor(j, tensor).expect("cannot set input tensor");
}
// 3. set outputs
for (size_t i = 0; i < interp.outputs_size(); i++)
{
auto desc = interp.output_desc(i);
auto shape = interp.output_shape(i);
auto tensor = host_runtime_tensor::create(desc.datatype, shape, hrt::pool_shared).expect("cannot create output tensor");
interp.output_tensor(i, tensor).expect("cannot set output tensor");
}
// 4. run
auto start = std::chrono::steady_clock::now();
interp.run().expect("error occurred in running model");
auto stop = std::chrono::steady_clock::now();
double duration = std::chrono::duration<double, std::milli>(stop - start).count();
std::cout << "interp run: " << duration << " ms, fps = " << 1000 / duration << std::endl;
// 5. get outputs
for (int i = 2 + interp.inputs_size(), j = 0; i < argc; i++, j++)
{
auto out = interp.output_tensor(j).expect("cannot get output tensor");
auto mapped_buf = std::move(hrt::map(out, map_access_::map_read).unwrap());
auto expected = read_binary_file<unsigned char>(argv[i]);
// 6. compare
int ret = memcmp((void *)mapped_buf.buffer().data(), (void *)expected.data(), expected.size());
if (!ret)
{
std::cout << "compare output " << j << " Pass!" << std::endl;
}
else
{
auto cos = cosine((const float *)mapped_buf.buffer().data(), (const float *)expected.data(), expected.size()/sizeof(float));
std::cerr << "compare output " << j << " Fail: cosine similarity = " << cos << std::endl;
}
}
return 0;
}
编译上述c++代码,将k230_bin目录下的debug目录拷贝到k230开发板。
#docker容器中,若已下载code过,请忽略clone步骤
docker exec -it v1.3_0219_lj /bin/bash
cd src/reference
git clone https://github.com/JayL323/K230_AI_Demo_Development_Process_Analysis.git
cd K230_AI_Demo_Development_Process_Analysis/kmodel_related/kmodel_inference/
./build_app.sh debug
# 在小核上:
# 大小核共用/sharefs/
cd /sharefs/
#示例:实际执行时,将源目录替换为自己的目录
scp liujie@10.10.1.22:/xxx/k230_bin/debug /sharefs/
# 大核上
cd /sharefs/k230_bin/debug
#./face_detect_main_nncase.sh
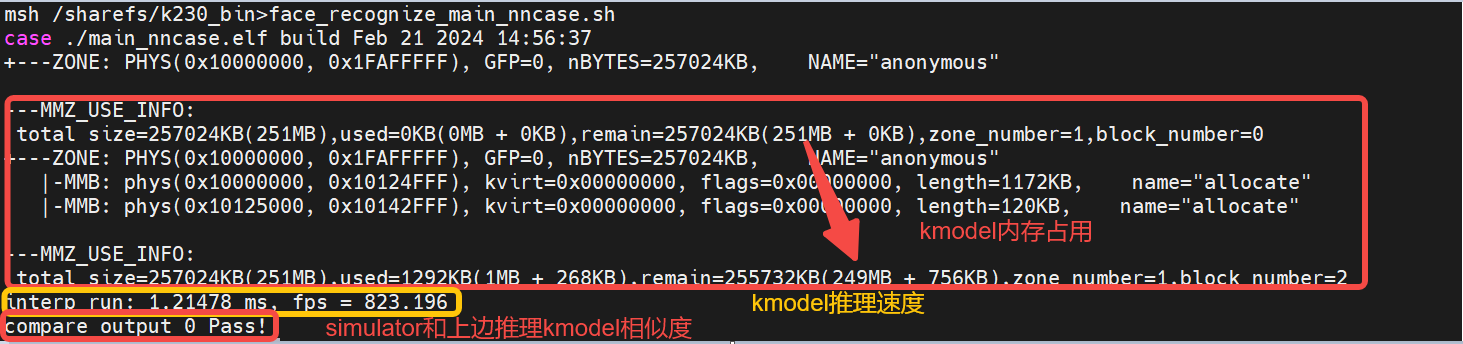
./main_nncase.elf face_detect_640.kmodel face_det_0_640x640_uint8.bin face_det_0_k230_simu.bin face_det_1_k230_simu.bin face_det_2_k230_simu.bin
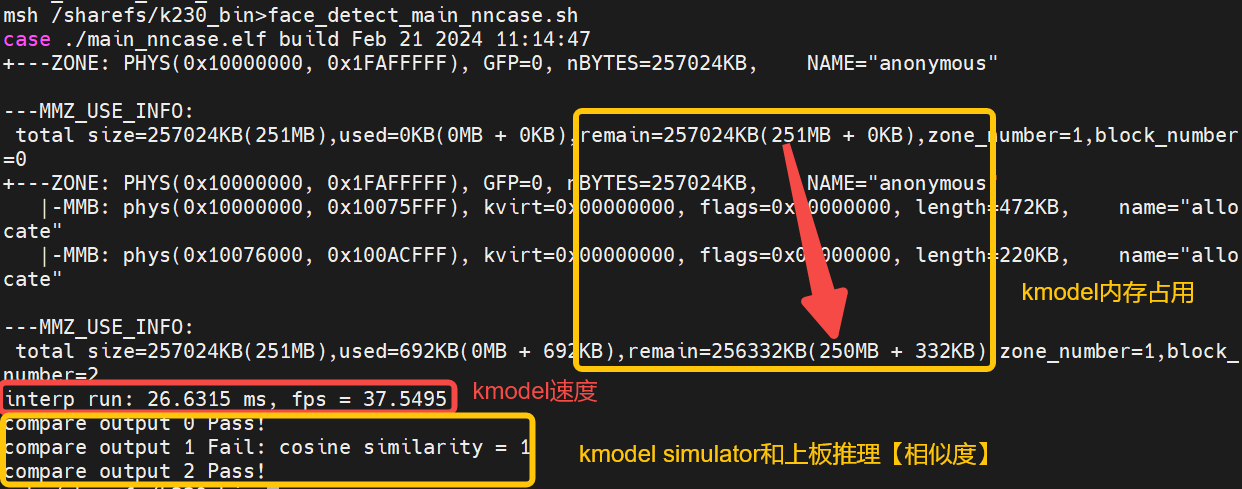
通过执行结果,可以发现:
- 人脸检测kmodel内存:大概占用1M左右
- 人脸检测kmodel推理速度:26.6ms
- 人脸检测Simulator和上板推理相似度:输出0,2 pass,byte级别完全一致;输出1 fail,float级别余弦相似度为1。一般0.99以上即可以满足要求
人脸检测simulator结�果大致满足要求,main_nncase的结果也满足要求,因此生成的人脸检测kmodel大概率是没有问题的。
6.3.1.4.3 使用K230Runtime进行推理
├── ai_base.cc #AI基类,封装KPU(K230)运行时API,简化kmodel相关操作
├── ai_base.h
├── anchors_640.cc #人脸检测640分辨率输入对应anchor
├── CMakeLists.txt
├── face_detection.cc #人脸检测demo,预处理,kmodel推理、后处理
├── face_detection.h
├── main.cc #人脸检测demo主流程
├── README.md
├── scoped_timing.hpp #计时类
├── utils.cc #工具类,封装常用函数及AI2D运行时APIs,简化预处理操作
├── utils.h
└── vi_vo.h #封装sensor、display操作
使用K230Runtime推理kmodel需要详细了解K230Runtime的说明文档,为了简化推理流程,对K230Runtime的接口进行封装,其中ai_base.cc、scoped_timing.hpp、utils.cc、vi_vo.h是封装好的方法,无需修改;对于不同模型,用户无需关心K230Runtime相关操作,只需将face_detection.cc、main.cc拷贝一份,只修改对应构造函数、预处理(pre_process)、后处理(post_process)即可。
1.读取图片或视频帧
(1)读取图片
cv::Mat ori_img = cv::imread(xxx);
(2)读取视频帧
背景知识:
(1)vi_vo.h简介:vi_vo.h主要封装了视频输入、视频输出相关配置。我们根据vi_vo.h构建了test_vi_vo示例,示例中讲解了如何使用vi,vo部分。
vi:视频输入,与sensor相关,详细介绍见K230_VICAP_API参考.md、K230_VICAP_SENSOR_参数分区参考.md、K230_Camera_Sensor适配指南.md。
- sensor启动
- 从sensor中dump一帧数据
- 将sensor中数据保存为png
- 释放sensor当前帧
- sensor停止
vo:视频输出,与display相关,详细介绍见K230_视频输出_API参考.md
- 将框或文字画到cv::Mat,并插入到vo osd对应通道中
- 释放osd block
(2)读取视频帧示例:test_vi_vo demo
2.预处理
背景知识:
(1)Uitls简介:Uitls主要封装了常用函数、nncase AI2D相关操作,AI2D相关部分包括Affine、Crop、Resize、Padding预处理操作,可以加速图像的预处理操作。
(2)预处理示例:test_utils demo
若是对AI2D 运行时APIs感兴趣,详情请查看K230_nncase_开发指南.md,若是在github无法看到K230_nncase_开发指南.md文档中目录结构,可以下载到本地,使用Typora工具打开。
人脸检测预处理:
背景知识:参数不变的情况下,ai2d_builder_可以反复调用;参数改变则需要创建新的ai2d_builder_。
对于图像预处理:由于不同图像的尺寸不同,对于padding_resize方法来说,AI2D的参数每次都会改变,需要重新调用Utils::padding_resize_one_side创建新的ai2d_builder_来进行预处理。
对于视频流预处理:由于不同帧的尺寸相同,padding的数值也未改变;故对于padding_resize方法来说,AI2D的参数一直不变,将新一帧的图像拷贝给ai2d_in_tensor_后,只需ai2d_builder_->invoke(人脸构造函数中已经构造好ai2d_builder_)调用。
//face_detection.cc
// ai2d for image
void FaceDetection::pre_process(cv::Mat ori_img)
{
ScopedTiming st(model_name_ + " pre_process image", debug_mode_);
std::vector<uint8_t> chw_vec;
Utils::bgr2rgb_and_hwc2chw(ori_img, chw_vec);
Utils::padding_resize_one_side({ori_img.channels(), ori_img.rows, ori_img.cols}, chw_vec, {input_shapes_[0][3], input_shapes_[0][2]}, ai2d_out_tensor_, cv::Scalar(123, 117, 104));
if (debug_mode_ > 1) //验证预处理是否正确,看当前预处理与onnx预处理是否一致:dump预处理之后图像
{
auto vaddr_out_buf = ai2d_out_tensor_.impl()->to_host().unwrap()->buffer().as_host().unwrap().map(map_access_::map_read).unwrap().buffer();
unsigned char *output = reinterpret_cast<unsigned char *>(vaddr_out_buf.data());
Utils::dump_color_image("FaceDetection_input_padding.png",{input_shapes_[0][3],input_shapes_[0][2]},output);
}
}
// ai2d for video
void FaceDetection::pre_process()
{
ScopedTiming st(model_name_ + " pre_process video", debug_mode_);
size_t isp_size = isp_shape_.channel * isp_shape_.height * isp_shape_.width;
auto buf = ai2d_in_tensor_.impl()->to_host().unwrap()->buffer().as_host().unwrap().map(map_access_::map_write).unwrap().buffer();
memcpy(reinterpret_cast<char *>(buf.data()), (void *)vaddr_, isp_size);
hrt::sync(ai2d_in_tensor_, sync_op_t::sync_write_back, true).expect("sync write_back failed");
ai2d_builder_->invoke(ai2d_in_tensor_, ai2d_out_tensor_).expect("error occurred in ai2d running");
if (debug_mode_ > 1) //验证预处理是否正确,看当前预处理与onnx预处理是否一致:dump预处理之后图像
{
auto vaddr_out_buf = ai2d_out_tensor_.impl()->to_host().unwrap()->buffer().as_host().unwrap().map(map_access_::map_read).unwrap().buffer();
unsigned char *output = reinterpret_cast<unsigned char *>(vaddr_out_buf.data());
Utils::dump_color_image("FaceDetection_input_padding.png",{input_shapes_[0][3],input_shapes_[0][2]},output);
}
}
3.kmodel run
背景知识:
(1)AIBase简介:AIBase主要封装了KPU相关操作,包括在AI设备(如k230)加载kmodel,设置kmodel输入数据,执行kpu/cpu计算, 获取kmodel输出数据等,AIBase的封装简化了KPU调用过程。
(2)kmodel推理示例(main_nncase修改为基于AIBase类的demo):test_aibase demo。
**KPU运行时APIs(KPU Runtime AIPS)**接口如下图所示。详情请查看K230_nncase_开发指南.md,若是在github无法看到K230_nncase_开发指南.md文档中目录结构,可以下载到本地,使用Typora工具打开。
人脸检测kmode推理:
//ai_base.cc
void AIBase::run()
{
ScopedTiming st(model_name_ + " run", debug_mode_);
kmodel_interp_.run().expect("error occurred in running model");
}
void AIBase::get_output()
{
ScopedTiming st(model_name_ + " get_output", debug_mode_);
p_outputs_.clear();
for (int i = 0; i < kmodel_interp_.outputs_size(); i++)
{
auto out = kmodel_interp_.output_tensor(i).expect("cannot get output tensor");
auto buf = out.impl()->to_host().unwrap()->buffer().as_host().unwrap().map(map_access_::map_read).unwrap().buffer();
float *p_out = reinterpret_cast<float *>(buf.data());
p_outputs_.push_back(p_out);
}
}
//face_detection.cc
void FaceDetection::inference()
{
this->run();
this->get_output();
}
//main.cc,验证kmodel推理是否正确:我们使用simulator和main_nncase已经验证过
......
FaceDetection fd;
fd.inference();
......
4.后处理
onnx后处理:
c++后处理(详情见代码):
//face_detection.cc
void FaceDetection::post_process(FrameSize frame_size, vector<FaceDetectionInfo> &results)
{
ScopedTiming st(model_name_ + " post_process", debug_mode_);
if (debug_mode_ > 3)
{
//验证后处理流程是否正确:排除预处理、模型推理,直接拿Simulator kmodel数据,判断后处理代码正确性。
......
}
else
{
filter_confs(p_outputs_[1]);
filter_locs(p_outputs_[0]);
filter_landms(p_outputs_[2]);
}
std::sort(confs_.begin(), confs_.end(), nms_comparator);
nms(results);
transform_result_to_src_size(frame_size, results);
}
| onnx后处理流程 | kmodel后处理流程 |
|---|---|
| 1.解码loc、landms | 1.过滤conf、loc、landms(数量级:16800->数百) |
| 2.过滤conf、loc、landms | 2.根据conf对conf、loc、landms进行排序(降低排序耗时) |
| 3.根据conf对conf、loc、landms进行排序 | 3.nms + 解码loc、landms |
| 4.nms | 4.将人脸检测结果变换到原图大小 |
| 5.top_k |
调整顺序之后的kmodel推理流程,更适合c++代码。
人脸检测后处理代码:
//face_detection.cc
void FaceDetection::post_process(FrameSize frame_size, vector<FaceDetectionInfo> &results)
{
ScopedTiming st(model_name_ + " post_process", debug_mode_);
if (debug_mode_ > 2)
{
//验证后处理流程是否正确:排除预处理、模型推理,直接拿Simulator kmodel数据,判断后处理代码正确性。
vector<float> out0 = Utils::read_binary_file<float>("../debug/face_det_0_k230_simu.bin");
vector<float> out1 = Utils::read_binary_file<float>("../debug/face_det_1_k230_simu.bin");
vector<float> out2 = Utils::read_binary_file<float>("../debug/face_det_2_k230_simu.bin");
filter_confs(out1.data());
filter_locs(out0.data());
filter_landms(out2.data());
}
else
{
filter_confs(p_outputs_[1]);
filter_locs(p_outputs_[0]);
filter_landms(p_outputs_[2]);
}
std::sort(confs_.begin(), confs_.end(), nms_comparator);
nms(results);
transform_result_to_src_size(frame_size, results);
}
/********************根据检测阈值kmodel数据结果***********************/
void FaceDetection::filter_confs(float *conf)
{
NMSRoiObj inter_obj;
confs_.clear();
for (uint32_t roi_index = 0; roi_index < objs_num_; roi_index++)
{
float score = conf[roi_index * CONF_SIZE + 1];
if (score > obj_thresh_)
{
inter_obj.ori_roi_index = roi_index;
inter_obj.before_sort_conf_index = confs_.size();
inter_obj.confidence = score;
confs_.push_back(inter_obj);
}
}
}
void FaceDetection::filter_locs(float *loc)
{
boxes_.clear();
boxes_.resize(confs_.size());
int roi_index = 0;
for (uint32_t conf_index = 0; conf_index < boxes_.size(); conf_index++)
{
roi_index = confs_[conf_index].ori_roi_index;
int start = roi_index * LOC_SIZE;
for (int i = 0; i < LOC_SIZE; ++i)
{
boxes_[conf_index][i] = loc[start + i];
}
}
}
void FaceDetection::filter_landms(float *landms)
{
landmarks_.clear();
landmarks_.resize(confs_.size());
int roi_index = 0;
for (uint32_t conf_index = 0; conf_index < boxes_.size(); conf_index++)
{
roi_index = confs_[conf_index].ori_roi_index;
int start = roi_index * LAND_SIZE;
for (int i = 0; i < LAND_SIZE; ++i)
{
landmarks_[conf_index][i] = landms[start + i];
}
}
}
/********************根据anchor解码检测框、五官点***********************/
Bbox FaceDetection::decode_box(int obj_index)
{
float cx, cy, w, h;
int box_index = confs_[obj_index].before_sort_conf_index;
int anchor_index = confs_[obj_index].ori_roi_index;
cx = boxes_[box_index][0];
cy = boxes_[box_index][1];
w = boxes_[box_index][2];
h = boxes_[box_index][3];
cx = g_anchors[anchor_index][0] + cx * 0.1 * g_anchors[anchor_index][2];
cy = g_anchors[anchor_index][1] + cy * 0.1 * g_anchors[anchor_index][3];
w = g_anchors[anchor_index][2] * std::exp(w * 0.2);
h = g_anchors[anchor_index][3] * std::exp(h * 0.2);
Bbox box;
box.x = cx - w / 2;
box.y = cy - h / 2;
box.w = w;
box.h = h;
return box;
}
SparseLandmarks FaceDetection::decode_landmark(int obj_index)
{
SparseLandmarks landmark;
int landm_index = confs_[obj_index].before_sort_conf_index;
int anchor_index = confs_[obj_index].ori_roi_index;
for (uint32_t ll = 0; ll < 5; ll++)
{
landmark.points[2 * ll + 0] = g_anchors[anchor_index][0] + landmarks_[landm_index][2 * ll + 0] * 0.1 * g_anchors[anchor_index][2];
landmark.points[2 * ll + 1] = g_anchors[anchor_index][1] + landmarks_[landm_index][2 * ll + 1] * 0.1 * g_anchors[anchor_index][3];
}
return landmark;
}
/********************iou计算***********************/
float FaceDetection::overlap(float x1, float w1, float x2, float w2)
{
float l1 = x1 - w1 / 2;
float l2 = x2 - w2 / 2;
float left = l1 > l2 ? l1 : l2;
float r1 = x1 + w1 / 2;
float r2 = x2 + w2 / 2;
float right = r1 < r2 ? r1 : r2;
return right - left;
}
float FaceDetection::box_intersection(Bbox a, Bbox b)
{
float w = overlap(a.x, a.w, b.x, b.w);
float h = overlap(a.y, a.h, b.y, b.h);
if (w < 0 || h < 0)
return 0;
return w * h;
}
float FaceDetection::box_union(Bbox a, Bbox b)
{
float i = box_intersection(a, b);
float u = a.w * a.h + b.w * b.h - i;
return u;
}
float FaceDetection::box_iou(Bbox a, Bbox b)
{
return box_intersection(a, b) / box_union(a, b);
}
/********************nms***********************/
void FaceDetection::nms(vector<FaceDetectionInfo> &results)
{
// nms
for (int conf_index = 0; conf_index < confs_.size(); ++conf_index)
{
if (confs_[conf_index].confidence < 0)
continue;
FaceDetectionInfo obj;
obj.bbox = decode_box(conf_index);
obj.sparse_kps = decode_landmark(conf_index);
obj.score = confs_[conf_index].confidence;
results.push_back(obj);
for (int j = conf_index + 1; j < confs_.size(); ++j)
{
if (confs_[j].confidence < 0)
continue;
Bbox b = decode_box(j);
if (box_iou(obj.bbox, b) >= nms_thresh_) // iou大于nms阈值的,之后循环将会忽略
confs_[j].confidence = -1;
}
}
}
/********************将人脸检测结果变换到原图***********************/
void FaceDetection::transform_result_to_src_size(FrameSize &frame_size, vector<FaceDetectionInfo> &results)
{
// transform result to dispaly size
int max_src_size = std::max(frame_size.width, frame_size.height);
for (int i = 0; i < results.size(); ++i)
{
auto &l = results[i].sparse_kps;
for (uint32_t ll = 0; ll < 5; ll++)
{
l.points[2 * ll + 0] = l.points[2 * ll + 0] * max_src_size;
l.points[2 * ll + 1] = l.points[2 * ll + 1] * max_src_size;
}
auto &b = results[i].bbox;
float x0 = b.x * max_src_size;
float x1 = (b.x + b.w) * max_src_size;
float y0 = b.y * max_src_size;
float y1 = (b.y + b.h) * max_src_size;
x0 = std::max(float(0), std::min(x0, float(frame_size.width)));
x1 = std::max(float(0), std::min(x1, float(frame_size.width)));
y0 = std::max(float(0), std::min(y0, float(frame_size.height)));
y1 = std::max(float(0), std::min(y1, float(frame_size.height)));
b.x = x0;
b.y = y0;
b.w = x1 - x0;
b.h = y1 - y0;
}
}
扩展:
检测后处理写起来比价复杂,因此对于常见的检测模型,我们给出了一些示例代码。
- retinaface:人脸检测post_process
- yolov5:摔倒检测post_process
- yolov8:人头检测post_process
5.显示结果
显示结果示例:test_vi_vo demo
6.编译、执行
将代码clone到已启动docker容器src/reference/目录,执行build_app.sh。
docker exec -it v1.3_0219_lj /bin/bash
cd src/reference
git clone https://github.com/JayL323/K230_AI_Demo_Development_Process_Analysis.git
cd K230_AI_Demo_Development_Process_Analysis/kmodel_related/kmodel_inference/
./build_app.sh debug #若是无需debug目录,执行./build_app.sh
将k230_bin目录下的face_detect目录拷贝到k230开发板小核/sharefs目录。
k230_bin
├── debug #调试用到的文件
│ ├── face_det_0_640x640_uint8.bin #人脸检测kmodel输入文件
│ ├── face_det_0_k230_simu.bin #人脸检测simulator第1个输出文件
│ ├── face_det_1_k230_simu.bin #人脸检测simulator第2个输出文件
│ ├── face_det_2_k230_simu.bin #人脸检测simulator第3个输出文件
│ ├── face_detect_640.kmodel #人脸检测kmodel
│ ├── face_detect.jpg #人脸检测基于图像推理时的输入图像
│ ├── face_detect_main_nncase.sh #人脸检测kmodel上板验证运行脚本
│ ├── face_detect_main_nncase_with_aibase.sh #人脸检测kmodel上板验证运行脚本
│ ├── face_recg_0_112x112_uint8.bin
│ ├── face_recg_0_k230_simu.bin
│ ├── face_recognize.kmodel
│ ├── face_recognize_main_nncase.sh
│ ├── main_nncase.elf #人脸检测kmodel上板验证可执行文件
│ ├── test_aibase.elf #test_aibase demo生成可执行文件
│ ├── test_scoped_timing.elf #test_scoped_timing demo生成可执行文件
│ ├── test_utils.elf #test_utils demo生成可执行文件
│ └── test_vi_vo.elf #test_vi_vo demo生成可执行文件
├── face_detect #人脸检测
│ ├── face_detect_640.kmodel
│ ├── face_detect_image.sh
│ ├── face_detection.elf
│ ├── face_detect_isp.sh
│ └── face_detect.jpg
└── face_recognize #人脸识别,人脸检测可以不关注
├── db
├── face_detect_640.kmodel
├── face_recognition.elf
├── face_recognize_isp.sh
└── face_recognize.kmodel
- (1) 预处理是否正确
将debug_mode设置为2,即可保存预处理之后的图像。
# 大小核共用/sharefs/
# 在小核上
cd /sharefs/
#示例:实际执行时,将源目录替换为自己的目录
scp liujie@10.10.1.22:/xxx/k230_bin /sharefs/
#在大核上(若是刚启动,先按q+Enter退去自启动程序)
cd /sharefs/k230_bin/face_detect
./face_detection.elf face_detect_640.kmodel 0.5 0.2 face_detect.jpg 2
#在小核上
cd /sharefs/k230_bin/face_detect
scp FaceDetection_input_padding.png username@ip:dir
将生成FaceDetection_input_padding.png,拷贝到pc查看,预处理代码是否正确。若是有问题,则需要看sensor原图有没有问题,设置的预处理参数是否正确。
- (2) 后处理是否正确
将debug_mode设置为3,即可验证后处理正确。
# 大小核共用/sharefs/
# 在小核上
cd /sharefs/
#示例:实际执行时,将源目录替换为自己的目录
scp liujie@10.10.1.22:/xxx/k230_bin /sharefs/
#在大核上(先按q+Enter退去自启动程序)
cd /sharefs/k230_bin/face_detect
./face_detection.elf face_detect_640.kmodel 0.5 0.2 face_detect.jpg 3
#在小核上
cd /sharefs/k230_bin/face_detect
scp face_detection_result.jpg username@ip:dir
将生成face_detection_result.jpg,拷贝到pc查看,预处理代码是否正确。若是不正确就需要对后处理部分代码进行仔细检查,打印调试。

- (3) 执行 在大核上执行
face_detect_isp.sh即可执行基于视频流的推理流程。
#在大核上
cd /sharefs/k230_bin/face_detect
./face_detect_isp.sh
6.3.2 人脸识别demo
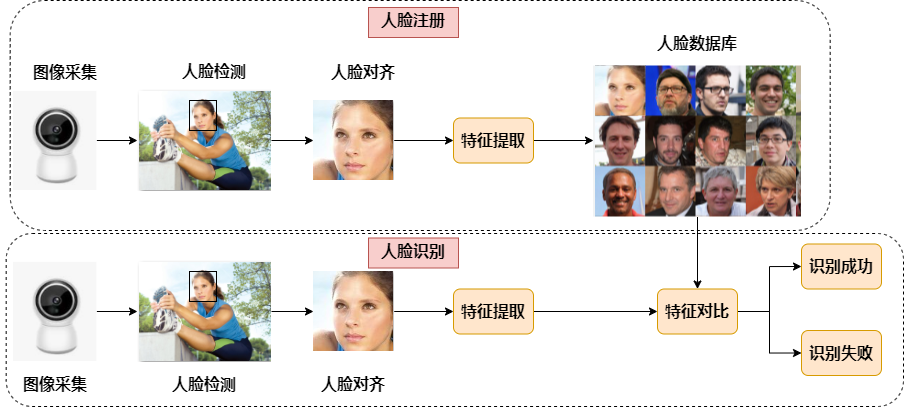
人脸识别是广泛使用的人脸任务,它将当前人脸与已知的人脸身份库进行比较,判断是否认识当前人脸。 人脸识别一般包含2个步骤:人脸注册和人脸识别,人脸注册用于构建人脸数据库,人脸识别用于识别存在数据库中的人脸。 人脸注册:图像采集->人脸定位->人脸对齐->特征提取->数据库保存 人脸识别:图像采集->人脸定位->人脸对齐->特征提取->特征比对->给出识别结果 人脸对齐:对于一张图像,人脸检测模型输出人脸目标框坐标和5个人脸关键点,在进行人脸识别前,需要对检测得到的人脸框进行对齐;即在2D平面将人脸转正,减少人脸旋转造成的差异,以便于后续更准确的人脸识别。
6.3.2.1 PyTorch到ONNX转换
选择人脸识别模型时,一般应选择轻量化的模型,backbone一般小于resnet50参数量较好。因此我们选择基于MobileNet且精度较高MobileFaceNet作为我们的人脸识别模型。参考链接:Xiaoccer/MobileFaceNet_Pytorch
- 加载pth或ckpt模型到cpu
- 构建随机模型输入
- 导出onnx模型
注:pth、onnx都支持动态输入,而K230�的模型暂时不支持动态输入,所以导出onnx时,onnx输入shape固定。
#convert_to_onnx.py
import numpy as np
import torch
from core import model #因模型而不同
def convert_onnx(net, path_module, output, opset=11):
assert isinstance(net, torch.nn.Module)
img = np.random.randint(0, 255, size=(112, 112, 3), dtype=np.int32)
img = img.astype(np.float)
img = (img / 255. - 0.5) / 0.5 # torch style norm
img = img.transpose((2, 0, 1))
img = torch.from_numpy(img).unsqueeze(0).float()
ckpt = torch.load(path_module,map_location='cpu')
net.load_state_dict(ckpt['net_state_dict'],strict=True)
net.eval()
torch.onnx.export(net, img, output, input_names=["data"], keep_initializers_as_inputs=False, verbose=False,
opset_version=opset)
if __name__ == '__main__':
net = model.MobileFacenet()
input_file = 'model/best/068.ckpt'
output_file = 'model/best/MobileFaceNet.onnx'
convert_onnx(net, input_file, output_file)
执行步骤:
将代码clone到pc上,安装依赖库,执行转onnx脚本。
git clone https://github.com/JayL323/K230_AI_Demo_Development_Process_Analysis/
cd K230_AI_Demo_Development_Process_Analysis
cd onnx_related/onnx_export
git clone https://github.com/Xiaoccer/MobileFaceNet_Pytorch
cp face_recognition_convert_to_onnx.py MobileFaceNet_Pytorch/
cd MobileFaceNet_Pytorch
#安装依赖库
python face_recognition_convert_to_onnx.py
6.3.2.2 使用ONNXRuntime进行推理
6.3.2.2.1 人脸对齐
常用人脸识别训练集主要有:MS1MV2、MS1MV3、Glint360K,制作这些数据集一般需要对完整的人脸原图进行预处理,即先进行人脸检测,然后对每个人脸进行人脸对齐,然后保存对齐后的人脸图片。
人脸对齐:对于一张图像,人脸检测模型输出人脸目标框坐标和5个人脸关键点,在进行人脸识别前,需要对检测得到的人脸进行对齐;即在2D平面将人脸转正,减少人脸旋转造成的差异,以便于后续更准确的人脸识别。
x.png:原始图片,x_affine.png:对齐后的人脸
def st_image(ori_image, landmarks):
#标准正脸人脸五官位置(112x112分辨率)
le_g = [38.2946, 51.6963]
re_g = [73.5318, 51.5014]
nose_g = [56.0252, 71.7366]
l_mouth_g = [41.5493, 92.3655]
r_mouth_g = [70.7299, 92.2041]
#实际人脸五官位置
le = landmarks[0, :]
re = landmarks[1, :]
nose = landmarks[2, :]
l_mouth = landmarks[3, :]
r_mouth = landmarks[4, :]
landmark_get = np.float32([le, re, nose, l_mouth, r_mouth])
landmark_golden = np.float32([le_g, re_g, nose_g, l_mouth_g, r_mouth_g])
#计算�从实际人脸->标准正脸需要经过的变换
tform = trans.SimilarityTransform()
tform.estimate(np.array(landmark_get), landmark_golden)
M = tform.params[0:2, :]
#得到变换后的人脸
affine_output = cv2.warpAffine(ori_image, M, (112, 112), borderValue=0.0)
return affine_output
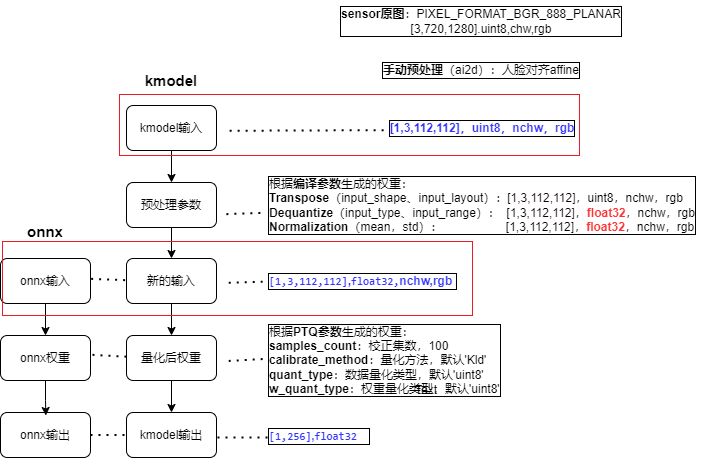
6.3.2.2.2 图像预处理
预处理构建(常用的方法:padding_resize,crop_resize,resize,affine、normalization):参考train.py,test.py、predict.py、现成的onnx推理脚本。
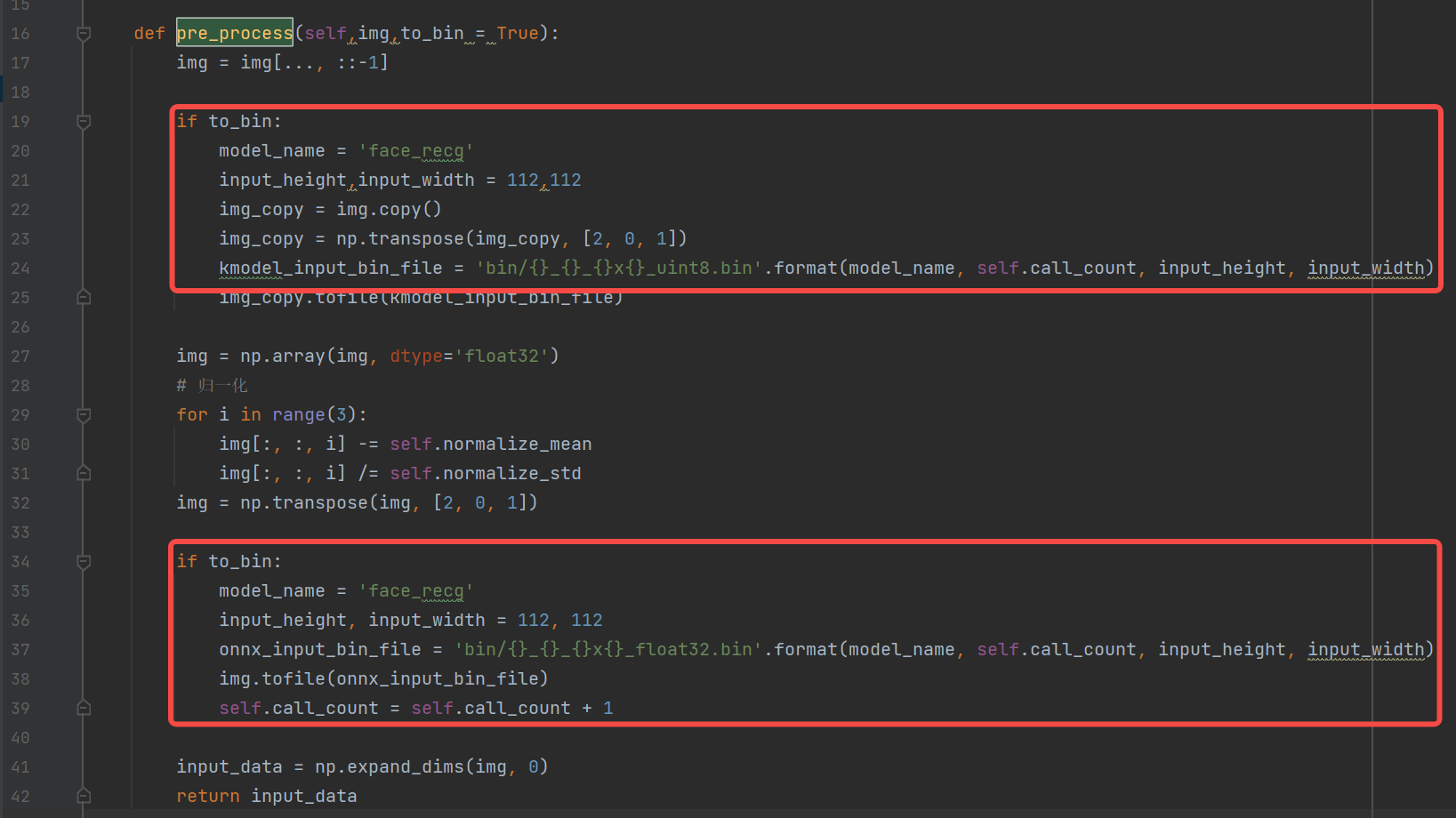
构建人脸识别预处理代码:
#mobile_face_net.py:MobileFaceNet
def pre_process(self,img,to_bin = True):
# bgr->rgb,uint8,(112,112,3)
img = img[..., ::-1]
# Dequantize,float32,(112,112,3)
img = np.array(img, dtype='float32')
#Normalization ,float32,(112,112,3)
for i in range(3):
img[:, :, i] -= self.normalize_mean
img[:, :, i] /= self.normalize_std
# transpose,hcw->chw,float32,(3,112,112)
img = np.transpose(img, [2, 0, 1])
# 3维扩张为4维,input_data,float32,(1,3,112,112)
input_data = np.expand_dims(img, 0)
return input_data
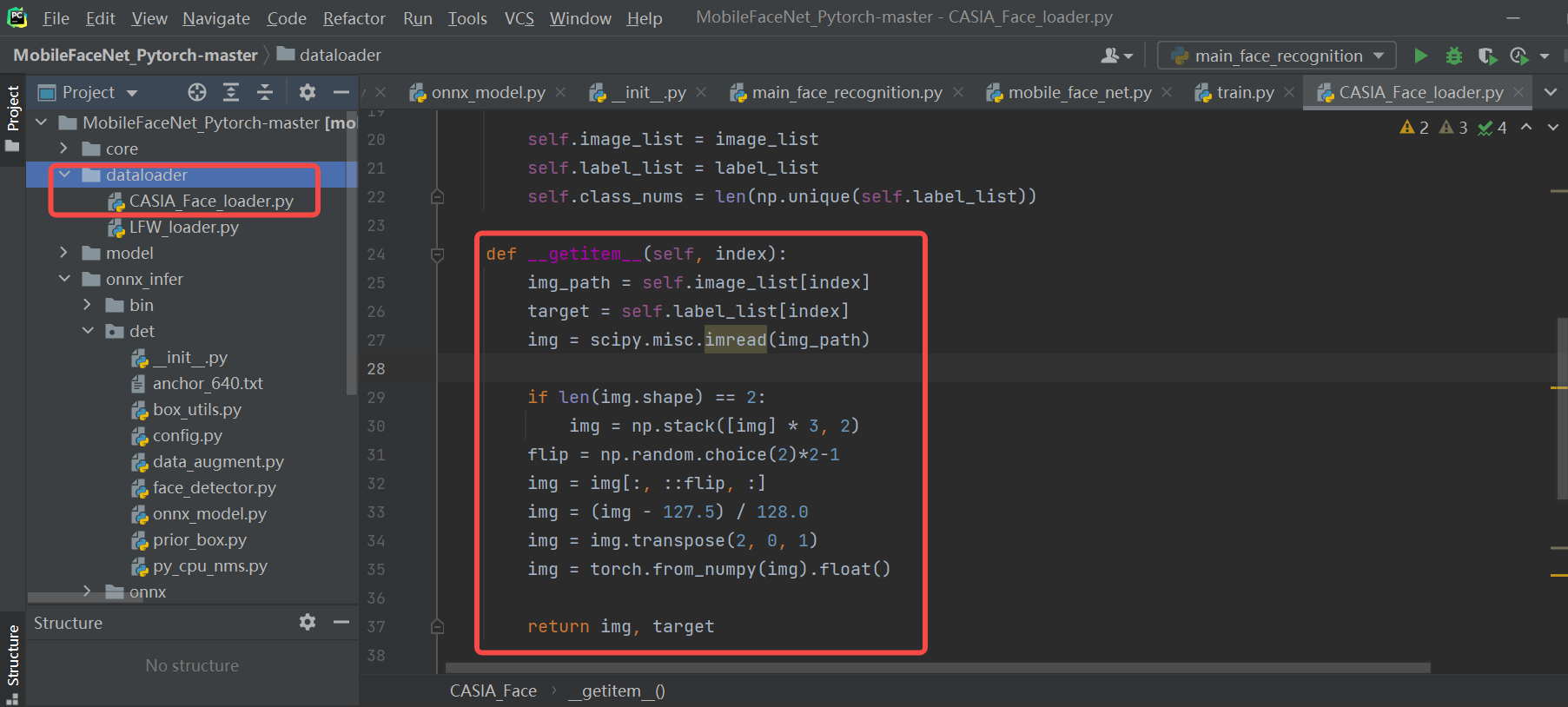
**参考:**人脸识别预处理代码参考train.py中调用的dataloader,去掉不适合推理使用的flip(数据增强),只留下onnx推理时必要的bgr->rgb(scipy.misc.imread 读取的图片数据是 RGB 格式)、Normalization(减mean除std)、hwc->chw(transpose)。
6.3.1.2.3 onnx run
将预处理好的数据,喂给模型,得到onnx推理结果
#onnx_model.py
def forward(self, image_tensor):
'''
image_tensor = image.transpose(2, 0, 1)
image_tensor = image_tensor[np.newaxis, :]
onnx_session.run([output_name], {input_name: x})
:param image_tensor:
:return:
'''
input_feed = self.get_input_feed(image_tensor)
output = self.sess.run(self.out_names, input_feed=input_feed)
return output
#mobile_face_net.py
def farward(self, input_data):
embedding = self.model.forward(input_data)
return embedding[0]
6.3.1.2.4 后处理
模型提取完特征后,放到数据库中,以备后续人脸对比使用。为了简化代码,我们暂时不写准备数据库的过程了,把它放在人脸对比的过程中。
6.3.1.2.5 人脸对比结果
读取多张人脸,对每个人脸提取特征,并将Normalization之后的特征保存到列表中。最后对比当前列表的第一个人脸和列表的相似度。
face_recg = MobileFaceNet()
embeddings = []
for i,img_file in enumerate(img_lists):
ori_img = cv2.imread(img_file)
input_data = face_recg.pre_process(ori_img)
embedding = face_recg.farward(input_data)
# 模型特征归一化,然后放到数据库中
embedding_norm = preprocessing.normalize(embedding)
embeddings.append(embedding_norm) #模拟构建数据库过程
# 获取第一个人脸特征,和其它人脸特征进行对比
embedding_one = embeddings[0]
scores = np.array([np.sum(embedding_one * emb_database) / 2 + 0.5 for emb_database in embeddings])
print("scores:",scores)
img_lists:
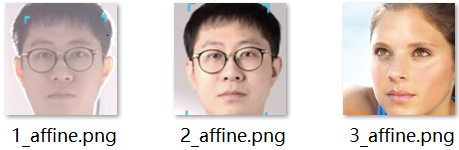
假如阈值设置为0.75的话,说明第0、1是同一个人脸,第0、2是不同人。

6.3.2.3 ONNX到kmodel转换
6.3.2.3.1 配置kmodel生成参数
1.编译参数:CompileOptions
具体为什么这样设置,请参照6.3.1.3.1中的编译参数设置方法。
# 1. 设置编译参数,compile_options
compile_options = nncase.CompileOptions()
# 指定编译目标, 如'cpu', 'k230',cpu生成cpu上推理的kmodel,k230生成在k230(kpu)上推理的kmodel
compile_options.target = args.target
# 预处理
compile_options.preprocess = True
# (1)预处理---Transpose相关参数
# 当 preprocess为 True时,必须指定
input_shape = [1, 3, 112, 112]
compile_options.input_shape = input_shape
# 输入数据的layout,默认为""
# compile_options.input_layout = "NCHW"
compile_options.input_layout = "0,1,2,3"
# (2)预处理---SwapRB相关参数
compile_options.swapRB = False
# (3)预处理---Dequantize(反量化)相关参数
# 开启预处理时指定输入数据类型,默认为"float";当 preprocess为 True时,必须指定为"uint8"或者"float32"
compile_options.input_type = 'uint8'
# input_type=‘uint8’时反量化有效,反量化之后的数据范围
compile_options.input_range = [0, 255]
# (4)预处理---Normalization相关参数
compile_options.mean = [ 127.5,127.5,127.5]
compile_options.std = [128.0, 128.0, 128.0]
# 后处理
# compile_options.output_layout = "NCHW"
#Compiler类, 根据编译参数配置Compiler,用于编译神经网络模型
compiler = nncase.Compiler(compile_options)
2.导入参数:ImportOptions
ImportOptions类, 用于配置nncase导入选项,很少单独设置,使用默认参数即可。
# 2. 设置导入参数,import_options(一般默认即可)
import_options = nncase.ImportOptions()
model_file = onnx_simplify(args.model, dump_dir)
model_content = read_model_file(model_file)
compiler.import_onnx(model_content, import_options)
3.训练后量化参数:PTQTensorOptions
训练后量化参数(Post Training Quantization,PTQ),PTQ是一种通过将模型权重从float32映射uint8或int16方法,保持模型的准确性的同时,减少推理所需的计算资源;当target = “k230”,PTQ是必选参数,默认uint8量化。
使用uint8量化可以满足人脸识别精度要求,故使用默认uint8量化;校正集个数为100;假设使用100个校正集生成kmodel的时间很久,可以适当的减少校正集。
# 3. 设置量化参数,ptq_options
ptq_options = nncase.PTQTensorOptions()
ptq_options.samples_count = 100
ptq_options.set_tensor_data(generate_data(input_shape, ptq_options.samples_count, args.dataset))
compiler.use_ptq(ptq_options)
6.3.2.3.2 校正集准备
使用少量校正集计算量化因子,可以快速得到量化模�型。使用该量化模型进行预测,可以减少计算量、降低计算内存、减小模型大小。
校正集一般选用验证集的100张图片即可。该人脸识别模型的验证集为LFW,故选用LFW的100张图像作为校正集。
注:
(1)若是kmodel生成时间很久或者验证集数据很少,也可尝试少于100个数据
(2)generate_data函数,生成的数据格式,需要大致保证与实际推理时喂给kmodel的数据格式一致,否则会导致生成kmodel有问题。
def generate_data(shape, batch, calib_dir):
# 生成的数据和实际kmodel输入数据保持一致,因为生成kmodel时,只会做参数中设置的预处理
# 生成的校正集数据需要做的预处理 ≈ onnx预处理 - 根据预处理参数设置的,包含在kmodel中预处理
# onnx预处理:bgr->rgb,transpose,normalization,dequantize,3维度转4维度
# kmodel中包含的预处理:dequantize,normalization
img_paths = [os.path.join(calib_dir, p) for p in os.listdir(calib_dir)]
data = []
for i in range(batch):
assert i < len(img_paths), "calibration images not enough."
# 读取图像,并转为RGB
img_data = Image.open(img_paths[i]).convert('RGB')
# transpose
img_data = np.transpose(img_data, (2, 0, 1))
data.append([img_data[np.newaxis, ...]])
return np.array(data)
input_shape = [1, 3, 112, 112]
......
ptq_options = nncase.PTQTensorOptions()
ptq_options.samples_count = 100
# 校正集数据预处理,将原图处理为kmodel需要数据
ptq_options.set_tensor_data(generate_data(input_shape, ptq_options.samples_count, args.dataset))
# 使用samples_count个校准数据计算量化因子
compiler.use_ptq(ptq_options)
......
6.3.2.3.3 生成kmodel
生成环境:6.2.2 构建的编译环境
生成步骤:
cd k230_sdk/src/reference
#若已下载code过,请忽略clone步骤
git clone https://github.com/JayL323/K230_AI_Demo_Development_Process_Analysis/
cd K230_AI_Demo_Development_Process_Analysis
cd kmodel_related/kmodel_export
#python mobile_face.py --target k230 --model onnx/MobileFaceNet.onnx --dataset lfw
./build_model.sh
-rw-r--r--+ 1 root root 1319744 Feb 29 14:56 face_recognize.kmodel
6.3.2.4 使用K230Runtime进行推理
6.3.2.4.1 Simulator验证kmodel
生成人脸识别kmodel之后,为了验证kmodel的准确性,需要在使用Simulator对比kmodel的输出和onnx的输出是否一致,这时就需要调用模拟器APIs(Python)。
1.生成input.bin
使用simulator验证kmodel之前,需要先准备好输入文件。由于kmodel包括部分预处理,因此对于同一张图片,需要分别利用不同预处理生成不同的onnx_input.bin、kmodel_input.bin。
| 名称 | onnx_input.bin构建流程 | kmodel_input.bin构建流程 |
|---|---|---|
| 源->目标 | (uint8,hwc,bgr->float32,nchw,bgr) | (uint8,hwc,bgr->uint8,nchw,rgb) |
| 原图 | (112,112,3) ,uint8, hwc,bgr | (112,112,3) ,uint8,hwc,bgr |
| bgr->rgb | (112,112,3),uint8,hwc,rgb | (112,112,3),uint8,hwc,rgb |
| dequantize | (112,112,3),float32,hwc,rgb | — |
| normalization | (112,112,3),float32,hwc,rgb | — |
| transpose | (3,112,112),float32,chw,rgb | (3,112,112),uint8,chw,rgb |
| 维度扩展(非必须) | (1,3,112,112),uint8,chw,rgb | (1,3,112,112),uint8,chw,rgb |
注:生成的kmodel中包含部分预处理,生成kmodel_input.bin需要的预处理 ≈ 生成onnx_input.bin需要的预处理 - kmodel中包含的预处理(人脸识别kmodel中预处理transpose、dequantize、normalization)
(1)维度扩展可以省略(读取时bin文件可以用reshape,生成bin时可以省略)
(2)transpose也放到kmodel中,为什么生成kmodel_input.bin仍需transpose?由于生成kmodel,若是打开了预处理开关,transpose的相关参数必须设置,我们人脸识别kmodel的实际输入是NCHW,input_layout设置为NCHW,两者是一致的,因此transpose是NCHW2NCHW,实际上并没有转换。
-rw-r--r-- 1 root root 147K Feb 26 16:37 face_recg_0_112x112_float32.bin
-rw-r--r-- 1 root root 37K Feb 26 16:37 face_recg_0_112x112_uint8.bin
2.Simulator验证
模拟器APIs的接口如下图所示。若是在github无法看到K230_nncase_开发指南.md文档中目录结构,可以下载到本地,使用Typora工具打开。
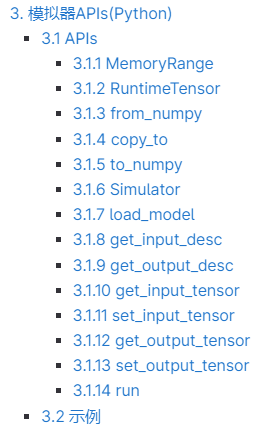
Simulator流程:(与人脸检测流程基本一致,只需修改input_shape、input_bin_file即可)
- 对于同一张图片,分别利用不同预处理生成不同的onnx_input.bin、kmodel_input.bin;
- 将onnx_input.bin喂给onnx,经过onnx推理得cpu_results;
- 将kmodel_input.bin喂给kmodel,经过Simulator推理得到nncase_results;
- 计算cpu_results和nncase_results的余弦相似度,通过相似度的大小判断kmodel的模拟推理和onnx的推理结果是否一致。
import os
import copy
import argparse
import numpy as np
import onnx
import onnxruntime as ort
import nncase
def read_model_file(model_file):
with open(model_file, 'rb') as f:
model_content = f.read()
return model_content
def cosine(gt, pred):
return (gt @ pred) / (np.linalg.norm(gt, 2) * np.linalg.norm(pred, 2))
def main():
parser = argparse.ArgumentParser(prog="nncase")
parser.add_argument("--target", type=str, help='target to run')
parser.add_argument("--model", type=str, help='original model file')
parser.add_argument("--model_input", type=str, help='input bin file for original model')
parser.add_argument("--kmodel", type=str, help='kmodel file')
parser.add_argument("--kmodel_input", type=str, help='input bin file for kmodel')
args = parser.parse_args()
# 1. onnx推理,得到cpu_results
ort_session = ort.InferenceSession(args.model)
output_names = []
model_outputs = ort_session.get_outputs()
for i in range(len(model_outputs)):
output_names.append(model_outputs[i].name)
model_input = ort_session.get_inputs()[0]
model_input_name = model_input.name
model_input_type = np.float32
model_input_shape = model_input.shape
print('onnx_input:',model_input_shape)
model_input_data = np.fromfile(args.model_input, model_input_type).reshape(model_input_shape)
cpu_results = []
cpu_results = ort_session.run(output_names, { model_input_name : model_input_data })
# 2. Simulator推理,得到nncase_results
# create Simulator
sim = nncase.Simulator()
# read kmodel
kmodel = read_model_file(args.kmodel)
# load kmodel
sim.load_model(kmodel)
# read input.bin
input_shape = [1, 3, 112, 112]
dtype = sim.get_input_desc(0).dtype
input = np.fromfile(args.kmodel_input, dtype).reshape(input_shape)
# set input for Simulator
sim.set_input_tensor(0, nncase.RuntimeTensor.from_numpy(input))
# Simulator inference
nncase_results = []
sim.run()
for i in range(sim.outputs_size):
nncase_result = sim.get_output_tensor(i).to_numpy()
# print("nncase_result:",nncase_result)
input_bin_file = 'bin/face_recg_{}_{}_simu.bin'.format(i,args.target)
nncase_result.tofile(input_bin_file)
nncase_results.append(copy.deepcopy(nncase_result))
# 3. 计算onnx和Simulator相似度
for i in range(sim.outputs_size):
cos = cosine(np.reshape(nncase_results[i], (-1)), np.reshape(cpu_results[i], (-1)))
print('output {0} cosine similarity : {1}'.format(i, cos))
if __name__ == '__main__':
main()
上边的脚本可以满足大部分onnx及其kmodel的对比验证,一般不用太多修改。只需根据模型实际输入大小修改input_shape即可。
python mobile_face_onnx_simu.py --target k230 --model onnx/MobileFaceNet.onnx --model_input bin/face_recg_0_112x112_float32.bin --kmodel onnx/k230_mobile_face.kmodel --kmodel_input bin/face_recg_0_112x112_uint8.bin
#若已下载code过,请忽略clone步骤
git clone https://github.com/JayL323/K230_AI_Demo_Development_Process_Analysis/
cd K230_AI_Demo_Development_Process_Analysis
cd kmodel_related/kmodel_export
#上述命令行已经放到build_model.sh
./build_model.sh
一般onnx和Simulator余弦相似度越高越好,一般0.99以上即可满足条件;若是达不到0.99,但是在0.96以上,可以通过进一步上板推理验证生成的kmodel是否满足实际效果需求。

**注:**在执行Simulator时,必须先添加以下环境变量(build_model.sh文件其中含有)
export NNCASE_PLUGIN_PATH=$NNCASE_PLUGIN_PATH:/usr/local/lib/python3.8/dist-packages/
export PATH=$PATH:/usr/local/lib/python3.8/dist-packages/
source /etc/profile
6.3.2.4.2 使用main_nncase验证kmodel
Simulator推理kmodel和上板推理kmodel一般来说是一致的,但是不排除个别情况下Simulator与实际上板仍有一定差异,为了验证两者是否一致,需要使用main_nncase工具辅助验证Simulator推理kmodel与上板实际推理kmodel结果是否一致;使用这个工具需要调用nncase的KPU运行时APIs(C++)。
KPU运行时APIs提供kmodel上板推理的各种接口 ,接口如下图所示。若是在github无法看到K230_nncase_开发指南.md文档中目录结构,可以下载到本地,使用Typora工具打开。
main_nncase验证流程:
- 加载kmodel
- 设置kmodel输入:读取kmodel_input.bin文件
- 设置kmodel输出
- 推理kmodel
- 获取kmodel输出
- 对比Simulator推理kmodel、上板推理kmodel结果相似性
//main_nncase
#include <chrono>
#include <fstream>
#include <iostream>
#include <nncase/runtime/runtime_tensor.h>
#include <nncase/runtime/interpreter.h>
#include <nncase/runtime/runtime_op_utility.h>
using namespace nncase;
using namespace nncase::runtime;
using namespace nncase::runtime::detail;
#define USE_CACHE 1
template <class T>
std::vector<T> read_binary_file(const char *file_name)
{
std::ifstream ifs(file_name, std::ios::binary);
ifs.seekg(0, ifs.end);
size_t len = ifs.tellg();
std::vector<T> vec(len / sizeof(T), 0);
ifs.seekg(0, ifs.beg);
ifs.read(reinterpret_cast<char *>(vec.data()), len);
ifs.close();
return vec;
}
void read_binary_file(const char *file_name, char *buffer)
{
std::ifstream ifs(file_name, std::ios::binary);
ifs.seekg(0, ifs.end);
size_t len = ifs.tellg();
ifs.seekg(0, ifs.beg);
ifs.read(buffer, len);
ifs.close();
}
template <typename T>
double dot(const T *v1, const T *v2, size_t size)
{
double ret = 0.f;
for (size_t i = 0; i < size; i++)
{
ret += v1[i] * v2[i];
}
return ret;
}
template <typename T>
double cosine(const T *v1, const T *v2, size_t size)
{
return dot(v1, v2, size) / ((sqrt(dot(v1, v1, size)) * sqrt(dot(v2, v2, size))));
}
void dump(const std::string &info, volatile float *p, size_t size)
{
std::cout << info << " dump: p = " << std::hex << (void *)p << std::dec << ", size = " << size << std::endl;
volatile unsigned int *q = reinterpret_cast<volatile unsigned int *>(p);
for (size_t i = 0; i < size; i++)
{
if ((i != 0) && (i % 4 == 0))
{
std::cout << std::endl;
}
std::cout << std::hex << q[i] << " ";
}
std::cout << std::dec << std::endl;
}
int main(int argc, char *argv[])
{
std::cout << "case " << argv[0] << " build " << __DATE__ << " " << __TIME__ << std::endl;
if (argc < 4)
{
std::cerr << "Usage: " << argv[0] << " <kmodel> <input_0.bin> <input_1.bin> ... <input_N.bin> <output_0.bin> <output_1.bin> ... <output_N.bin>" << std::endl;
return -1;
}
interpreter interp;
// 1. load model
std::ifstream in_before_load_kmodel("/proc/media-mem");
std::string line_before_load_kmodel;
// 逐行读取文件内容,查看MMZ使用情况
while (std::getline(in_before_load_kmodel, line_before_load_kmodel)) {
std::cout << line_before_load_kmodel << std::endl;
}
std::ifstream ifs(argv[1], std::ios::binary);
interp.load_model(ifs).expect("Invalid kmodel");
std::ifstream in_after_load_kmodel("/proc/media-mem");
std::string line_after_load_kmodel;
// 逐行读取文件内容,查看MMZ使用情况
while (std::getline(in_after_load_kmodel, line_after_load_kmodel)) {
std::cout << line_after_load_kmodel << std::endl;
}
// 2. set inputs
for (size_t i = 2, j = 0; i < 2 + interp.inputs_size(); i++, j++)
{
auto desc = interp.input_desc(j);
auto shape = interp.input_shape(j);
auto tensor = host_runtime_tensor::create(desc.datatype, shape, hrt::pool_shared).expect("cannot create input tensor");
auto mapped_buf = std::move(hrt::map(tensor, map_access_::map_write).unwrap());
#if USE_CACHE
read_binary_file(argv[i], reinterpret_cast<char *>(mapped_buf.buffer().data()));
#else
auto vec = read_binary_file<unsigned char>(argv[i]);
memcpy(reinterpret_cast<void *>(mapped_buf.buffer().data()), reinterpret_cast<void *>(vec.data()), vec.size());
// dump("app dump input vector", (volatile float *)vec.data(), 32);
#endif
auto ret = mapped_buf.unmap();
ret = hrt::sync(tensor, sync_op_t::sync_write_back, true);
if (!ret.is_ok())
{
std::cerr << "hrt::sync failed" << std::endl;
std::abort();
}
// dump("app dump input block", (volatile float *)block.virtual_address, 32);
interp.input_tensor(j, tensor).expect("cannot set input tensor");
}
// 3. set outputs
for (size_t i = 0; i < interp.outputs_size(); i++)
{
auto desc = interp.output_desc(i);
auto shape = interp.output_shape(i);
auto tensor = host_runtime_tensor::create(desc.datatype, shape, hrt::pool_shared).expect("cannot create output tensor");
interp.output_tensor(i, tensor).expect("cannot set output tensor");
}
// 4. run
auto start = std::chrono::steady_clock::now();
interp.run().expect("error occurred in running model");
auto stop = std::chrono::steady_clock::now();
double duration = std::chrono::duration<double, std::milli>(stop - start).count();
std::cout << "interp run: " << duration << " ms, fps = " << 1000 / duration << std::endl;
// 5. get outputs
for (int i = 2 + interp.inputs_size(), j = 0; i < argc; i++, j++)
{
auto out = interp.output_tensor(j).expect("cannot get output tensor");
auto mapped_buf = std::move(hrt::map(out, map_access_::map_read).unwrap());
auto expected = read_binary_file<unsigned char>(argv[i]);
// 6. compare
int ret = memcmp((void *)mapped_buf.buffer().data(), (void *)expected.data(), expected.size());
if (!ret)
{
std::cout << "compare output " << j << " Pass!" << std::endl;
}
else
{
auto cos = cosine((const float *)mapped_buf.buffer().data(), (const float *)expected.data(), expected.size()/sizeof(float));
std::cerr << "compare output " << j << " Fail: cosine similarity = " << cos << std::endl;
}
}
return 0;
}
编译上述c++代码,将生成的k230_bin目录拷贝到CanMV-K230开发板。
#docker容器中,若已下载code过,请忽略clone步骤
docker exec -it v1.3_0219_lj /bin/bash
cd src/reference
git clone https://github.com/JayL323/K230_AI_Demo_Development_Process_Analysis.git
cd K230_AI_Demo_Development_Process_Analysis/kmodel_related/kmodel_inference/
./build_app.sh debug
# 在小核上:
# 大小核共用/sharefs/
cd /sharefs/
#示例:实际执行时,将源目录替换为自己的目录
scp liujie@10.10.1.22:/xxx/k230_bin/debug /sharefs/
# 大核上
cd /sharefs/k230_bin/debug
# face_recognize_main_nncase.sh
./main_nncase.elf face_recognize.kmodel face_recg_0_112x112_uint8.bin face_recg_0_k230_simu.bin
通过执行结果,可以发现:
- 人脸识别kmodel内存:大概占用2M左右
- 人脸识别kmodel推理速度:1.21ms
- 人脸识别Simulator和上板推理相似度:输出完全一致(byte级别一致)
6.3.2.4.3 使用K230Runtime进行推理
整体流程:
识别流程:
├── ai_base.cc #AI基类,封装KPU运行时API,简化kmodel相关操作
├── ai_base.h
├── anchors_640.cc #人脸检测640分辨率输入对应anchor
├── CMakeLists.txt
├── face_detection.cc #人脸检测,预处理,kmodel推理、后处理
├── face_detection.h
├── face_recognition.cc #人脸识别,预处理,kmodel推理、数据库比对
├── face_recognition.h
├── main.cc #人脸识别demo主流程
├── README.md
├── scoped_timing.hpp #计时类
├── utils.cc #工具类,封装常用函数及AI2D 运行时APIs,简化预处理操作
├── utils.h
└── vi_vo.h #封装sensor、display操作
�使用K230Runtime推理kmodel需要详细了解K230Runtime的说明文档,为了简化推理流程,对K230Runtime的接口进行封装,其中ai_base.cc、scoped_timing.hpp、utils.cc、vi_vo.h是封装好的方法,无需修改;face_detection.cc已经在人脸检测demo中实现,直接拷贝即可;face_recognition.cc只需将face_detection.cc拷贝一份,修改对应构造函数、预处理(pre_process)、后处理(post_process)即可。
1.读取图片或视频帧
(1)读取图片
cv::Mat ori_img = cv::imread(xxx);
(2)读取视频帧
读取视频帧示例:test_vi_vo demo
2.预处理
背景知识:参数不变的情况下,ai2d_builder_可以反复调用;参数改变则需要创建新的ai2d_builder_。
人脸识别图像预处理:由于输入的人脸五官点位置不同,计算得到仿射变换也不同;人脸对齐(affine)时需要用生成的仿射变换作为参数来设置AI2D,AI2D的参数每次都会改变,需要重新调用Utils::affine创建新的ai2d_builder_来进行预处理。
人脸识别视频流预处理:同理,由于不同帧的人脸五官点位置不同,也需要重新调用Utils::affine创建新的ai2d_builder_来进行预处理。
// ai2d for image
void FaceRecognition::pre_process(cv::Mat ori_img, float *sparse_points)
{
ScopedTiming st(model_name_ + " pre_process image", debug_mode_);
get_affine_matrix(sparse_points);
std::vector<uint8_t> chw_vec;
Utils::bgr2rgb_and_hwc2chw(ori_img, chw_vec);
Utils::affine({ori_img.channels(), ori_img.rows, ori_img.cols}, chw_vec, matrix_dst_, ai2d_out_tensor_);
if (debug_mode_ > 1)
{
auto vaddr_out_buf = ai2d_out_tensor_.impl()->to_host().unwrap()->buffer().as_host().unwrap().map(map_access_::map_read).unwrap().buffer();
unsigned char *output = reinterpret_cast<unsigned char *>(vaddr_out_buf.data());
Utils::dump_color_image("FaceRecognition_input_affine.png",{input_shapes_[0][3],input_shapes_[0][2]},output);
}
}
// ai2d for video
void FaceRecognition::pre_process(float *sparse_points)
{
ScopedTiming st(model_name_ + " pre_process_video", debug_mode_);
get_affine_matrix(sparse_points);
size_t isp_size = isp_shape_.channel * isp_shape_.height * isp_shape_.width;
auto buf = ai2d_in_tensor_.impl()->to_host().unwrap()->buffer().as_host().unwrap().map(map_access_::map_write).unwrap().buffer();
memcpy(reinterpret_cast<char *>(buf.data()), (void *)vaddr_, isp_size);
hrt::sync(ai2d_in_tensor_, sync_op_t::sync_write_back, true).expect("sync write_back failed");
Utils::affine(matrix_dst_, ai2d_builder_, ai2d_in_tensor_, ai2d_out_tensor_);
if (debug_mode_ > 1)
{
auto vaddr_out_buf = ai2d_out_tensor_.impl()->to_host().unwrap()->buffer().as_host().unwrap().map(map_access_::map_read).unwrap().buffer();
unsigned char *output = reinterpret_cast<unsigned char *>(vaddr_out_buf.data());
Utils::dump_color_image("FaceRecognition_input_affine.png",{input_shapes_[0][3],input_shapes_[0][2]},output);
}
}
sparse_point(人脸五官点)的获取方式:先进行人脸检测,人脸检测结果中包含sparse_point。
//main.cc
......
//人脸检测、人脸识别示例创建时都共享同一块地址vaddr
FaceDetection face_det(argv[1], atof(argv[2]),atof(argv[3]), {SENSOR_CHANNEL, SENSOR_HEIGHT, SENSOR_WIDTH}, reinterpret_cast<uintptr_t>(vaddr), reinterpret_cast<uintptr_t>(paddr), atoi(argv[8]));
FaceRecognition face_recg(argv[4],atoi(argv[5]),recg_thres, {SENSOR_CHANNEL, SENSOR_HEIGHT, SENSOR_WIDTH}, reinterpret_cast<uintptr_t>(vaddr), reinterpret_cast<uintptr_t>(paddr), atoi(argv[8]));
//每从sensor读取一帧图像,都会将数据拷贝到vaddr
while (!isp_stop)
{
ScopedTiming st("total time", 1);
{
// 每从sensor读取一帧图像
ScopedTiming st("read capture", atoi(argv[8]));
memset(&dump_info, 0, sizeof(k_video_frame_info));
ret = kd_mpi_vicap_dump_frame(vicap_dev, VICAP_CHN_ID_1, VICAP_DUMP_YUV, &dump_info, 1000);
if (ret)
{
printf("sample_vicap...kd_mpi_vicap_dump_frame failed.\n");
continue;
}
}
{
// 将从sensor中读取数据拷贝到vaddr
ScopedTiming st("isp copy", atoi(argv[8]));
auto vbvaddr = kd_mpi_sys_mmap_cached(dump_info.v_frame.phys_addr[0], size);
memcpy(vaddr, (void *)vbvaddr, SENSOR_HEIGHT * SENSOR_WIDTH * 3); // 这里以后可以去掉,不用copy
kd_mpi_sys_munmap(vbvaddr, size);
}
det_results.clear();
// 将vaddr数据拷贝给人脸检测ai2d输入,预处理后,预处理结果会放到ai2d输出;ai2d输出,其实是指向人脸检测kmodel输入的
face_det.pre_process();
face_det.inference();
face_det.post_process({SENSOR_WIDTH, SENSOR_HEIGHT}, det_results);
cv::Mat osd_frame(osd_height, osd_width, CV_8UC4, cv::Scalar(0, 0, 0, 0));
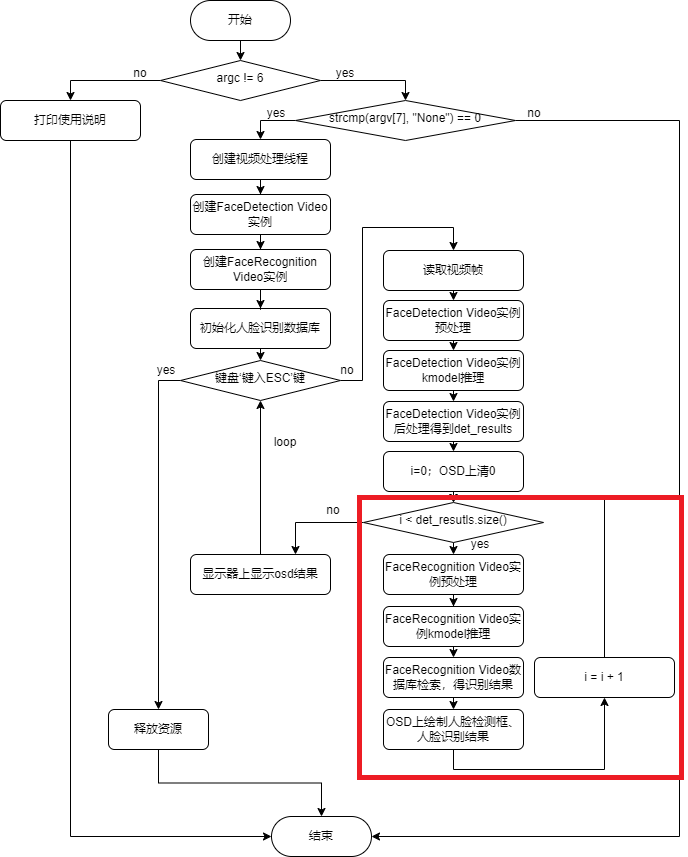
for (int i = 0; i < det_results.size(); ++i)
{
//***for face recg***
// 将vaddr数据拷贝给人脸识别ai2d输入,预处理后,预处理结果会放到ai2d输出;ai2d输出,其实是指向人脸识别kmodel输入的
face_recg.pre_process(det_results[i].sparse_kps.points);
face_recg.inference();
FaceRecognitionInfo recg_result;
face_recg.database_search(recg_result);
face_recg.draw_result(osd_frame,det_results[i].bbox,recg_result,false);
}
{
ScopedTiming st("osd copy", atoi(argv[8]));
memcpy(pic_vaddr, osd_frame.data, osd_width * osd_height * 4);
// 显示通道插入帧
kd_mpi_vo_chn_insert_frame(osd_id + 3, &vf_info); // K_VO_OSD0
ret = kd_mpi_vicap_dump_release(vicap_dev, VICAP_CHN_ID_1, &dump_info);
if (ret)
{
printf("sample_vicap...kd_mpi_vicap_dump_release failed.\n");
}
}
}
......
3.kmodel run
//ai_base.cc
void AIBase::run()
{
ScopedTiming st(model_name_ + " run", debug_mode_);
kmodel_interp_.run().expect("error occurred in running model");
}
void AIBase::get_output()
{
ScopedTiming st(model_name_ + " get_output", debug_mode_);
p_outputs_.clear();
for (int i = 0; i < kmodel_interp_.outputs_size(); i++)
{
auto out = kmodel_interp_.output_tensor(i).expect("cannot get output tensor");
auto buf = out.impl()->to_host().unwrap()->buffer().as_host().unwrap().map(map_access_::map_read).unwrap().buffer();
float *p_out = reinterpret_cast<float *>(buf.data());
p_outputs_.push_back(p_out);
}
}
//face_recognition.cc
void FaceRecognition::inference()
{
this->run();
this->get_output();
}
//main.cc,验证kmodel推理是否正确:我们使用simulator和main_nncase已经验证过
......
FaceRecognition face_recg;
face_recg.inference();
......
4.后处理
拿到人脸识别kmodel推理结果embeding后,需要将当前embeding与数据库中embedding进行对比,若对比结果大于某一阈值,则识别成功,说明该人脸已注册;否则,识别失败��。
//face_recognition.cc
void FaceRecognition::l2_normalize(float *src, float *dst, int len)
{
float sum = 0;
for (int i = 0; i < len; ++i)
{
sum += src[i] * src[i];
}
sum = sqrtf(sum);
for (int i = 0; i < len; ++i)
{
dst[i] = src[i] / sum;
}
}
float FaceRecognition::cal_cosine_distance(float *feature_0, float *feature_1, int feature_len)
{
float cosine_distance = 0;
// calculate the sum square
for (int i = 0; i < feature_len; ++i)
{
float p0 = *(feature_0 + i);
float p1 = *(feature_1 + i);
cosine_distance += p0 * p1;
}
// cosine distance
return (0.5 + 0.5 * cosine_distance) * 100;
}
void FaceRecognition::database_search(FaceRecognitionInfo &result)
{
int i;
int v_id = -1;
float v_score;
float v_score_max = 0.0;
float basef[feature_num_], testf[feature_num_];
// current frame
l2_normalize(p_outputs_[0], testf, feature_num_);
for (i = 0; i < valid_register_face_; i++)
{
l2_normalize(feature_database_ + i * feature_num_, basef, feature_num_);
v_score = cal_cosine_distance(testf, basef, feature_num_);
if (v_score > v_score_max)
{
v_score_max = v_score;
v_id = i;
}
}
if (v_id == -1)
{
result.id = v_id;
result.name = "unknown";
result.score = 0;
}
else
{
result.id = v_id;
result.name = names_[v_id];
result.score = v_score_max;
}
}
5.显示结果
显示结果示例:test_vi_vo demo
6.编译、执行
将代码clone到已启动docker容器src/reference/目录,执行build_app.sh,将k230_bin目录拷贝到k230开发板小核。
docker exec -it v1.3_0219_lj /bin/bash
cd src/reference
git clone https://github.com/JayL323/K230_AI_Demo_Development_Process_Analysis.git
cd K230_AI_Demo_Development_Process_Analysis/kmodel_related/kmodel_inference/
./build_app.sh debug #若是无需debug目录,执行./build_app.sh
将k230_bin目录拷贝到k230开发板/sharefs/。
- (1) 预处理是否正确
将debug_mode设置为2,即可保存预处理之后的图像。
# 大小核共用/sharefs/
# 在小核上
cd /sharefs/
#示例:实际执行时,将源目录替换为自己的目录
scp liujie@10.10.1.22:/xxx/k230_bin /sharefs/
#在大核上(先按q+Enter退去自启动程序)
cd /sharefs/k230_bin/face_recognize
./face_recognition.elf face_detect_640.kmodel 0.6 0.2 face_recognize.kmodel 100 75 None 2 db
#在小核上
cd /sharefs/k230_bin/face_recognize
scp FaceRecognition_input_affine.png username@ip:dir
将生成FaceDetection_input_padding.png,拷贝到pc查看,预处理代码是否正确。若是有问题,则需要看sensor原图有没有问题,设置的预处理参数是否正确。

- (2) 后处理是否正确
人脸识别的后处理比较简单,比较当前人脸和数据库人脸的相似度即可,这里我们就不单独进行验证。
- (3) 执行
在大核上执行face_recognize_isp.sh即可执行基于视频流的推理流程。
# 大小核共用/sharefs/
#大核上
cd /sharefs/k230_bin/face_recognize
./face_recognize_isp.sh
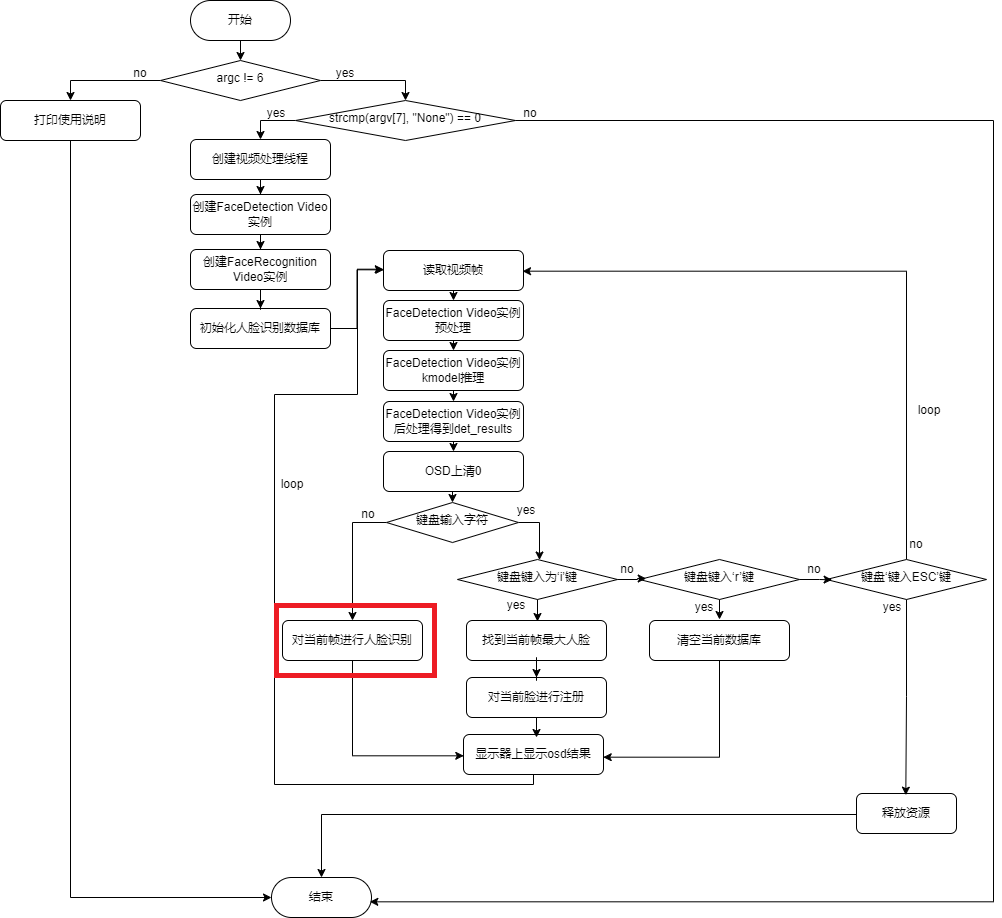
#按‘i’键开始注册当前帧最大人脸,输入注册人脸名称:eg:aaa
#下一帧开始就可以识别已注册人脸
#按‘Esc’推理当前程序
6.4 常用调试技巧
6.4.1 技巧一:target = ‘cpu’
当target = 'k230'时,生成kmodel,验证发现kmodel推理结果不对,怎么办?
compile_options.target = 'k230'
...
ptq_options = nncase.PTQTensorOptions()
ptq_options.samples_count = 100
ptq_options.set_tensor_data(generate_data(input_shape, ptq_options.samples_count, args.dataset))
compiler.use_ptq(ptq_options)
修改target设置,target = 'cpu',重新生成cpu_xxx.kmodel,此时生成的kmodel没有量化;若cpu_xxx.kmodel推理正确,而k230_xxx.kmodel推理错误,说明kmodel的解析没有问题,跟量化有关,可以检查校正集数量(数量少?)、校正集内容(generate_data的格式是否和实际kmodel输入一致)、修改量化方法、量化类型来修正。
6.4.2 技巧二:int16量化
当target = 'k230'时,生成kmodel,使用K230Runtime进行推理时,发现有效果,但精度还有待提高,怎么办?
有效果,但精度还有待提高时,说明校正集大概率是没有问题的,可以修改量化方法、量化类型来优化。
# int16量化(量化参数配置)
import nncase
ptq_options = nncase.PTQTensorOptions()
ptq_options.samples_count = 100 #量化数量一般是100
ptq_options.set_tensor_data(generate_data(input_shape, ptq_options.samples_count, args.dataset))
# 四种option可以根据需要选用,暂不支持w_quant_type、quant_type【同时】int16量化
# option 1:使用'Noclip'的int16量化,权重:float32->int16
ptq_options.calibrate_method = 'NoClip' #量化方法,及变换方法,比较典型的是最大最小值量化
ptq_options.w_quant_type = 'int16' #指定权重(Weights)量化类型,'int16'或'uint8'
# option 2:使用'Noclip'的int16量化,数据:float32->int16
ptq_options.calibrate_method = 'NoClip'
ptq_options.quant_type = 'int16' #指定数据(data)量化类型,'int16'或'uint8'
# option 3:使用'Kld'的int16量化,权重:float32->int16
ptq_options.w_quant_type = 'int16'
# option 4:使用'Kld'的int16量化,数据:float32->int16
ptq_options.quant_type = 'int16'
compiler.use_ptq(ptq_options)
人脸检测option 1量化示例:mobile_retinaface_data_100_640_uint16_option_1.py
人脸检测option 2量化示例:mobile_retinaface_data_100_640_uint16_option_2.py
人脸检测option 3量化示例:mobile_retinaface_data_100_640_uint16_option_3.py
人脸检测option 4量化示例:mobile_retinaface_data_100_640_uint16_option_4.py
#生成环境:6.2.2中构建的编译环境
git clone https://github.com/JayL323/K230_AI_Demo_Development_Process_Analysis.git
cd K230_AI_Demo_Development_Process_Analysis/kmodel_related/kmodel_export
./build_model_int16.sh
-rw-r--r-- 1 root root 1.2M Mar 1 11:48 face_detect_int16_opt1.kmodel
-rw-r--r-- 1 root root 960K Mar 1 11:50 face_detect_int16_opt2.kmodel
-rw-r--r-- 1 root root 1.7M Mar 1 11:52 face_detect_int16_opt3.kmodel
-rw-r--r-- 1 root root 960K Mar 1 11:54 face_detect_int16_opt4.kmodel
./build_model_int16.sh后,会在生成4个模型;生成kmodel的同时,使用Simulator进行验证,输出验证的相似度,根据相似度的高低选择模型。
6.4.3 技巧三:input.bin生成
当生成kmodel时,配置预处理参数为True,可以简单的认为:
kmodel ≈ 配置的kmodel预处理 + onnx;
对于同一张图片,kmodel输入需要的预处理 ≈ onnx输入需要的预处理 - 配置的kmodel预处理 ;即kmodel_input.bin ≈ onnx_input.bin - 配置的kmodel预处理。