单一颜色识别
1.实验目的
学习K230识别图片中指定的颜色。
2.实验原理
对图像的每个像素进行判断:是否满足某个颜色范围(阈值)——满足的就认为是目标颜色。
blobs = img.find_blobs([thresholds], area_threshold=area_threshold, pixels_threshold=pixels_threshold, merge=True, margin=0)
参数解释
- thresholds: 这是一个包含颜色范围的列表,用于定义要查找的斑点的颜色范围。通常是一个包含两个或三个元素的元组。例如,
(100, 200, -64, 127, -128, 127)表示 HSV 颜色空间中的范围,其中第一个和第二个值是 Hue,第三和第四值是 Saturation,最后两个值是 Value。 - area_threshold: 斑点的面积阈值��。只有面积大于这个值的斑点才会被返回。默认值是 0。
- pixels_threshold: 斑点的像素数阈值。只有包含的像素数大于这个值的斑点才会被返回。默认值是 0。
- merge: 是否合并相邻的斑点。设为
True时,相邻的斑点会被合并成一个大斑点;设为False时,斑点不会合并。默认值是True。 - margin: 用于合并斑点时的边距。设置为一个正整数,表示合并斑点时的最大距离。默认值是 0。
返回值
find_blobs 函数返回一个包含斑点信息的列表。每个斑点都是一个 Blob 对象,通常包含以下属性:
cx和cy:斑点的中心坐标。x和y:斑点的左上角坐标。w和h:斑点的宽度和高度。area:斑点的面积(像素数)。
3.代码解析
颜色阈值定义
thresholds = [
(30, 100, 15, 127, 15, 127), # 红色
(30, 100, -64, -8, 50, 70), # 绿色
(0, 40, 0, 90, -128, -20) # 蓝色
]
定义颜色识别的阈值,格式是 Lab 颜色空间下的 (L_min, L_max, A_min, A_max, B_min, B_max)。
每个元组代表一个颜色范围,find_blobs() 会用来提取图像中满足这个范围的区域(blob)。
摄像头初始化
sensor = Sensor(width=DETECT_WIDTH, height=DETECT_HEIGHT)
sensor.reset()
sensor.set_framesize(width=DETECT_WIDTH, height=DETECT_HEIGHT)
sensor.set_pixformat(Sensor.RGB565)
- 实例化摄像头对象,指定输出分辨率;
reset():重置摄像头,加载默认配置;set_framesize():设置输出图像分辨率;set_pixformat():设置输出格式为 RGB565(适合显示和处理)。
显示设备初始化
Display.init(Display.ST7701, to_ide=True)
初始化 LCD 显示屏(使用 ST7701 驱动),同时也输出到 IDE 缓冲区,方便调试。
MediaManager.init()
初始化媒体资源管理器,处理图像缓存、内存池等底层资源。
启动图像采集
sensor.run()
获取当前图像帧
img = sensor.snapshot()
查找颜色
blobs = img.find_blobs([thresholds[0], thresholds[1], thresholds[2]])
#blobs = img.find_blobs([thresholds[0]]) #检测红色
#blobs = img.find_blobs([thresholds[1]]) #检测绿色
#blobs = img.find_blobs([thresholds[2]]) #检测蓝色
查找图像中红绿蓝三种颜色的 blob(色块区域);
你也可以通过注释/取消注释只识别一种颜色。
if blobs:
for b in blobs:
img.draw_rectangle(b[0:4], thickness=4)
img.draw_cross(b[5], b[6], thickness=2)
如果找到了 blob,就绘制矩形框和中心十字标记;
b[0:4] 是矩形的 x, y, w, h;
b[5], b[6] 是 blob 的中心坐标 cx, cy。
显示结果
Display.show_image(img)
将图像绘制到 LCD 屏幕上。
4.示例代码
'''
本程序遵循GPL V3协议, 请遵循协议
实验平台: DshanPI CanMV
开发板文档站点 : https://eai.100ask.net/
百问网学习平台 : https://www.100ask.net
百问网官方B站 : https://space.bilibili.com/275908810
百问网官方淘宝 : https://100ask.taobao.com
'''
import time, os, sys
from media.sensor import * # 导入摄像头相关接口
from media.display import * # 导入显示相关接口
from media.media import * # 导入媒体资源相关接口
DETECT_WIDTH = 800 # 设置检测图像宽度
DETECT_HEIGHT = 480 # 设置检测图像高度
# 颜色识别阈值(L 最小值,L 最大值,A 最小值,A 最大值,B 最小值,B 最大值)
# 下面的阈值元组用于识别红色、绿色、蓝色。你可以根据需要调整这些阈值来改善识别效果。
thresholds = [
(30, 100, 15, 127, 15, 127), # 红色阈值
(30, 100, -64, -8, 50, 70), # 绿色阈值
(0, 40, 0, 90, -128, -20) # 蓝色阈值
]
sensor = None # 摄像头对象
try:
# 创建并初始化摄像头对象
sensor = Sensor(width=DETECT_WIDTH, height=DETECT_HEIGHT)
sensor.reset() # 重置摄像头设置
sensor.set_framesize(width=DETECT_WIDTH, height=DETECT_HEIGHT) # 设置帧大小
sensor.set_pixformat(Sensor.RGB565) # 设置图像格式为 RGB565
# 初始化显示设备,使用 LCD 显示器
Display.init(Display.ST7701, to_ide=True)
# 初始化媒体资源管理器
MediaManager.init()
# 启动摄像头采集
sensor.run()
# 初始化帧率计时器
clock = time.clock()
while True:
clock.tick() # 每帧开始时计时
# 获取当前图像帧
img = sensor.snapshot()
# 查找符合颜色阈值的 blobs,分别检测红色、绿色和蓝色
blobs = img.find_blobs([thresholds[0], thresholds[1], thresholds[2]])
#blobs = img.find_blobs([thresholds[0]]) #检测红色
#blobs = img.find_blobs([thresholds[1]]) #检测绿色
#blobs = img.find_blobs([thresholds[2]]) #检测蓝色
# 如果检测到 blobs,绘制矩形和交叉线标记
if blobs:
for b in blobs:
img.draw_rectangle(b[0:4], thickness=4) # 绘制矩形框
img.draw_cross(b[5], b[6], thickness=2) # 绘制交叉线标记
# 在图像左上角显示 FPS
img.draw_string_advanced(0, 0, 30, 'FPS: ' + str("%.3f" % (clock.fps())), color=(255, 255, 255))
# 显示图像到屏幕
Display.show_image(img)
# 打印当前 FPS
print(clock.fps())
except KeyboardInterrupt as e:
print(f"用户停止")
except BaseException as e:
print(f"异常发生:'{e}'")
finally:
# 停止摄像头采集
if isinstance(sensor, Sensor):
sensor.stop()
# 关闭显示
Display.deinit()
# 释放媒体资源
MediaManager.deinit()
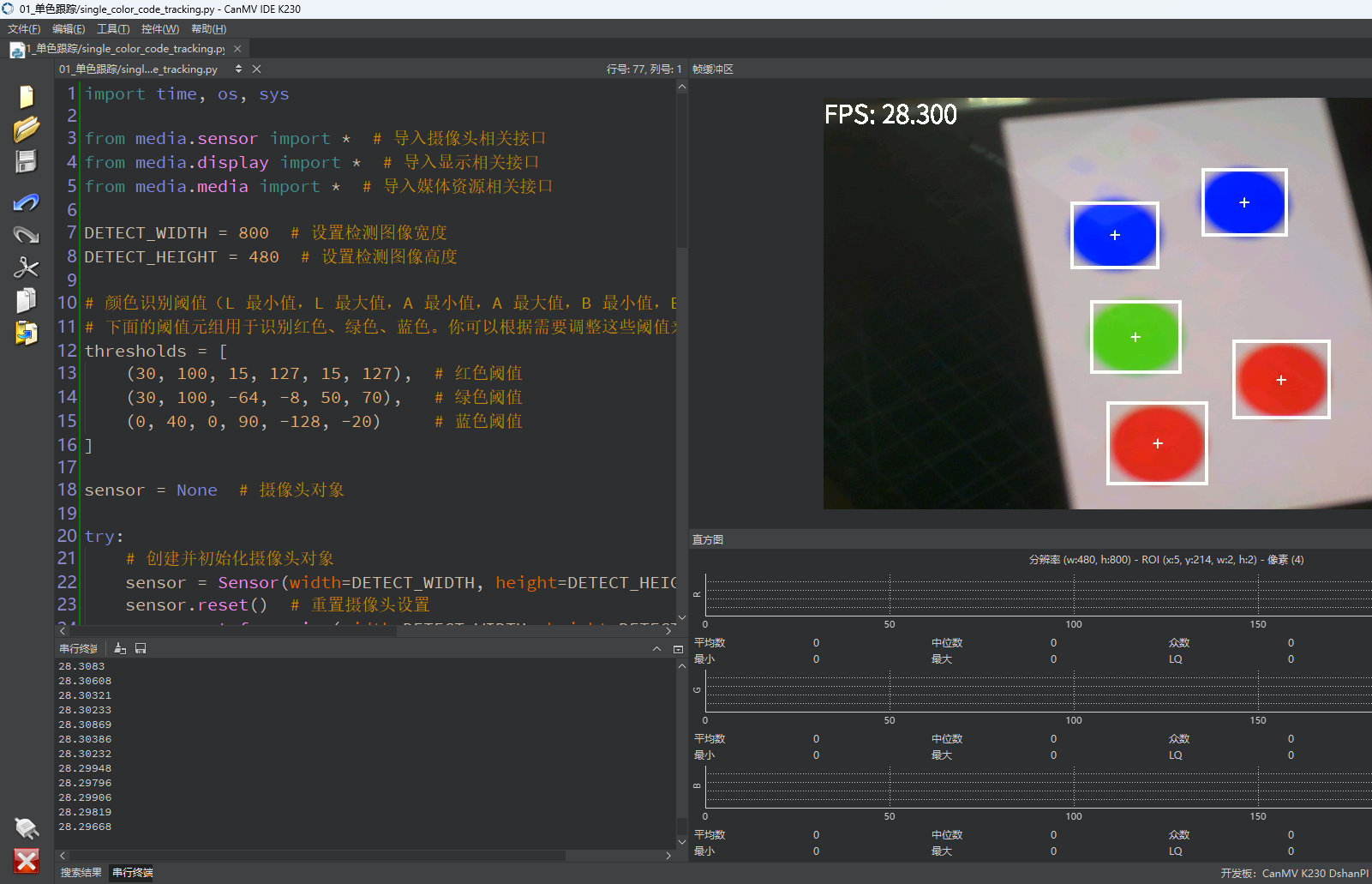
5.实验结果
点击运行代码后,可以在显示屏上看到检测到的色块。