拼图游戏
1.学习目的
学习摄像头的画面进行拼图游戏。
2.示例代码
'''
本程序遵循GPL V3协议, 请遵循协议
实验平台: DshanPI CanMV
开发板文档站点 :: https://eai.100ask.net/
百问网学习平台 : https://www.100ask.net
百问网官方B站 : https://space.bilibili.com/275908810
百问网官方淘宝 : https://100ask.taobao.com
'''
from libs.PipeLine import PipeLine, ScopedTiming
from libs.AIBase import AIBase
from libs.AI2D import Ai2d
import os
import ujson
from media.media import *
from time import *
import nncase_runtime as nn
import ulab.numpy as np
import time
import image
import aicube
import random
import gc
import sys
# 自定义手掌检测任务类
class HandDetApp(AIBase):
def __init__(self,kmodel_path,labels,model_input_size,anchors,confidence_threshold=0.2,nms_threshold=0.5,nms_option=False, strides=[8,16,32],rgb888p_size=[1920,1080],display_size=[1920,1080],debug_mode=0):
super().__init__(kmodel_path,model_input_size,rgb888p_size,debug_mode)
# kmodel路径
self.kmodel_path=kmodel_path
self.labels=labels
# 检测模型输入分辨率
self.model_input_size=model_input_size
# 置信度阈值
self.confidence_threshold=confidence_threshold
# nms阈值
self.nms_threshold=nms_threshold
self.anchors=anchors
self.strides = strides # 特征下采样倍数
self.nms_option = nms_option # NMS选项,如果为True做类间NMS,如果为False做类内NMS
# sensor给到AI的图像分辨率,宽16字节对齐
self.rgb888p_size=[ALIGN_UP(rgb888p_size[0],16),rgb888p_size[1]]
# 视频输出VO分辨率,宽16字节对齐
self.display_size=[ALIGN_UP(display_size[0],16),display_size[1]]
# debug模式
self.debug_mode=debug_mode
self.ai2d=Ai2d(debug_mode)
self.ai2d.set_ai2d_dtype(nn.ai2d_format.NCHW_FMT,nn.ai2d_format.NCHW_FMT,np.uint8, np.uint8)
def config_preprocess(self,input_image_size=None):
with ScopedTiming("set preprocess config",self.debug_mode > 0):
# 初始化ai2d预处理配置,默认为sensor给到AI的尺寸,可以通过设置input_image_size自行修改输入尺寸
ai2d_input_size = input_image_size if input_image_size else self.rgb888p_size
# 计算padding参数并应用pad操作,以确保输入图像尺寸与模型输入尺寸匹配
top, bottom, left, right = self.get_padding_param()
self.ai2d.pad([0, 0, 0, 0, top, bottom, left, right], 0, [114, 114, 114])
# 使用双线性插值进行resize操作,调整图像尺寸以符合模型输入要求
self.ai2d.resize(nn.interp_method.tf_bilinear, nn.interp_mode.half_pixel)
# 构建预处理流程
self.ai2d.build([1,3,ai2d_input_size[1],ai2d_input_size[0]],[1,3,self.model_input_size[1],self.model_input_size[0]])
# 自定义后处理,results是模型的输出array列表,这里使用了aicube库的anchorbasedet_post_process
def postprocess(self,results):
with ScopedTiming("postprocess",self.debug_mode > 0):
dets = aicube.anchorbasedet_post_process(results[0], results[1], results[2], self.model_input_size, self.rgb888p_size, self.strides, len(self.labels), self.confidence_threshold, self.nms_threshold, self.anchors, self.nms_option)
# 返回手掌检测结果
return dets
# 计算padding参数,确保输入图像尺寸与模型输入尺寸匹配
def get_padding_param(self):
# 根据目标宽度和高度计算比例因��子
dst_w = self.model_input_size[0]
dst_h = self.model_input_size[1]
input_width = self.rgb888p_size[0]
input_high = self.rgb888p_size[1]
ratio_w = dst_w / input_width
ratio_h = dst_h / input_high
# 选择较小的比例因子,以确保图像内容完整
if ratio_w < ratio_h:
ratio = ratio_w
else:
ratio = ratio_h
# 计算新的宽度和高度
new_w = int(ratio * input_width)
new_h = int(ratio * input_high)
# 计算宽度和高度的差值,并确定padding的位置
dw = (dst_w - new_w) / 2
dh = (dst_h - new_h) / 2
top = int(round(dh - 0.1))
bottom = int(round(dh + 0.1))
left = int(round(dw - 0.1))
right = int(round(dw + 0.1))
return top, bottom, left, right
# 自定义手势关键点分类任务类
class HandKPClassApp(AIBase):
def __init__(self,kmodel_path,model_input_size,rgb888p_size=[1920,1080],display_size=[1920,1080],debug_mode=0):
super().__init__(kmodel_path,model_input_size,rgb888p_size,debug_mode)
# kmodel路径
self.kmodel_path=kmodel_path
# 检测模型输入分辨率
self.model_input_size=model_input_size
# sensor给到AI的图像分辨率,宽16字节对齐
self.rgb888p_size=[ALIGN_UP(rgb888p_size[0],16),rgb888p_size[1]]
# 视频输出VO分辨率,宽16字节对齐
self.display_size=[ALIGN_UP(display_size[0],16),display_size[1]]
self.crop_params=[]
# debug模式
self.debug_mode=debug_mode
self.ai2d=Ai2d(debug_mode)
self.ai2d.set_ai2d_dtype(nn.ai2d_format.NCHW_FMT,nn.ai2d_format.NCHW_FMT,np.uint8, np.uint8)
# 配置预处理操作,这里使用了crop和resize,Ai2d支持crop/shift/pad/resize/affine
def config_preprocess(self,det,input_image_size=None):
with ScopedTiming("set preprocess config",self.debug_mode > 0):
ai2d_input_size=input_image_size if input_image_size else self.rgb888p_size
self.crop_params = self.get_crop_param(det)
self.ai2d.crop(self.crop_params[0],self.crop_params[1],self.crop_params[2],self.crop_params[3])
self.ai2d.resize(nn.interp_method.tf_bilinear, nn.interp_mode.half_pixel)
self.ai2d.build([1,3,ai2d_input_size[1],ai2d_input_size[0]],[1,3,self.model_input_size[1],self.model_input_size[0]])
# 自定义后处理,results是模型的输出array列表
def postprocess(self,results):
with ScopedTiming("postprocess",self.debug_mode > 0):
results=results[0].reshape(results[0].shape[0]*results[0].shape[1])
results_show = np.zeros(results.shape,dtype=np.int16)
results_show[0::2] = (results[0::2] * self.crop_params[3] + self.crop_params[0])
results_show[1::2] = (results[1::2] * self.crop_params[2] + self.crop_params[1])
return results_show
# 计算crop参数
def get_crop_param(self,det_box):
x1, y1, x2, y2 = det_box[2],det_box[3],det_box[4],det_box[5]
w,h= int(x2 - x1),int(y2 - y1)
w_det = int(float(x2 - x1) * self.display_size[0] // self.rgb888p_size[0])
h_det = int(float(y2 - y1) * self.display_size[1] // self.rgb888p_size[1])
x_det = int(x1*self.display_size[0] // self.rgb888p_size[0])
y_det = int(y1*self.display_size[1] // self.rgb888p_size[1])
length = max(w, h)/2
cx = (x1+x2)/2
cy = (y1+y2)/2
ratio_num = 1.26*length
x1_kp = int(max(0,cx-ratio_num))
y1_kp = int(max(0,cy-ratio_num))
x2_kp = int(min(self.rgb888p_size[0]-1, cx+ratio_num))
y2_kp = int(min(self.rgb888p_size[1]-1, cy+ratio_num))
w_kp = int(x2_kp - x1_kp + 1)
h_kp = int(y2_kp - y1_kp + 1)
return [x1_kp, y1_kp, w_kp, h_kp]
# 拼图游戏任务类
class PuzzleGame:
def __init__(self,hand_det_kmodel,hand_kp_kmodel,det_input_size,kp_input_size,labels,anchors,confidence_threshold=0.25,nms_threshold=0.3,nms_option=False,strides=[8,16,32],rgb888p_size=[1280,720],display_size=[1920,1080],debug_mode=0):
# 手掌检测模型路径
self.hand_det_kmodel=hand_det_kmodel
# 手掌关键点模型路径
self.hand_kp_kmodel=hand_kp_kmodel
# 手掌检测模型输入分辨率
self.det_input_size=det_input_size
# 手掌关键点模型输入分辨率
self.kp_input_size=kp_input_size
self.labels=labels
# anchors
self.anchors=anchors
# 置信度阈值
self.confidence_threshold=confidence_threshold
# nms阈值
self.nms_threshold=nms_threshold
self.nms_option=nms_option
self.strides=strides
# sensor给到AI的图像分辨率,宽16字节对齐
self.rgb888p_size=[ALIGN_UP(rgb888p_size[0],16),rgb888p_size[1]]
# 视频输出VO分辨率,宽16字节对齐
self.display_size=[ALIGN_UP(display_size[0],16),display_size[1]]
# debug_mode模式
self.debug_mode=debug_mode
self.level = 3 # 游戏级别 目前只支持设置为 3
self.puzzle_width = self.display_size[1] # 设定 拼图宽
self.puzzle_height = self.display_size[1] # 设定 拼图高
self.puzzle_ori_width = self.display_size[0] - self.puzzle_width - 50 # 设定 原始拼图宽
self.puzzle_ori_height = self.display_size[0] - self.puzzle_height - 50 # 设定 原始拼图高
self.every_block_width = int(self.puzzle_width/self.level) # 设定 拼图块宽
self.every_block_height = int(self.puzzle_height/self.level) # 设定 拼图块高
self.ori_every_block_width = int(self.puzzle_ori_width/self.level) # 设定 原始拼图宽
self.ori_every_block_height = int(self.puzzle_ori_height/self.level) # 设定 原始拼图高
self.ratio_num = self.every_block_width/360.0 # 字体比例
self.blank_x = 0 # 空白块 角点x
self.blank_y = 0 # 空白块 角点y
self.direction_vec = [-1,1,-1,1] # 空白块四种移动方向
self.exact_division_x = 0 # 交换块 角点x
self.exact_division_y = 0 # 交换块 角点y
self.distance_tow_points = self.display_size[0] # 两手指距离
self.distance_thred = self.every_block_width*0.4 # 两手指�距离阈值
self.osd_frame_tmp = np.zeros((self.display_size[1],self.display_size[0],4),dtype=np.uint8)
self.osd_frame_tmp_img = image.Image(self.display_size[0], self.display_size[1], image.ARGB8888,alloc=image.ALLOC_REF,data=self.osd_frame_tmp)
self.move_mat = np.zeros((self.every_block_height,self.every_block_width,4),dtype=np.uint8)
self.init_osd_frame()
self.hand_det=HandDetApp(self.hand_det_kmodel,self.labels,model_input_size=self.det_input_size,anchors=self.anchors,confidence_threshold=self.confidence_threshold,nms_threshold=self.nms_threshold,nms_option=self.nms_option,strides=self.strides,rgb888p_size=self.rgb888p_size,display_size=self.display_size,debug_mode=0)
self.hand_kp=HandKPClassApp(self.hand_kp_kmodel,model_input_size=self.kp_input_size,rgb888p_size=self.rgb888p_size,display_size=self.display_size)
self.hand_det.config_preprocess()
# 初始化拼图界面,绘制两个3*3的拼图
def init_osd_frame(self):
self.osd_frame_tmp[0:self.puzzle_height,0:self.puzzle_width,3] = 100
self.osd_frame_tmp[0:self.puzzle_height,0:self.puzzle_width,2] = 150
self.osd_frame_tmp[0:self.puzzle_height,0:self.puzzle_width,1] = 130
self.osd_frame_tmp[0:self.puzzle_height,0:self.puzzle_width,0] = 127
self.osd_frame_tmp[(self.display_size[1]-self.puzzle_ori_height)//2:(self.display_size[1]-self.puzzle_ori_height)//2+self.puzzle_ori_width,self.puzzle_width+25:self.puzzle_width+25+self.puzzle_ori_height,3] = 100
self.osd_frame_tmp[(self.display_size[1]-self.puzzle_ori_height)//2:(self.display_size[1]-self.puzzle_ori_height)//2+self.puzzle_ori_width,self.puzzle_width+25:self.puzzle_width+25+self.puzzle_ori_height,2] = 150
self.osd_frame_tmp[(self.display_size[1]-self.puzzle_ori_height)//2:(self.display_size[1]-self.puzzle_ori_height)//2+self.puzzle_ori_width,self.puzzle_width+25:self.puzzle_width+25+self.puzzle_ori_height,1] = 130
self.osd_frame_tmp[(self.display_size[1]-self.puzzle_ori_height)//2:(self.display_size[1]-self.puzzle_ori_height)//2+self.puzzle_ori_width,self.puzzle_width+25:self.puzzle_width+25+self.puzzle_ori_height,0] = 127
for i in range(self.level*self.level):
self.osd_frame_tmp_img.draw_rectangle((i%self.level)*self.every_block_width,(i//self.level)*self.every_block_height,self.every_block_width,self.every_block_height,(255,0,0,0),5)
self.osd_frame_tmp_img.draw_string_advanced((i%self.level)*self.every_block_width + 55,(i//self.level)*self.every_block_height + 45,int(60*self.ratio_num),str(i),color=(255,0,0,255))
self.osd_frame_tmp_img.draw_rectangle(self.puzzle_width+25 + (i%self.level)*self.ori_every_block_width,(self.display_size[1]-self.puzzle_ori_height)//2 + (i//self.level)*self.ori_every_block_height,self.ori_every_block_width,self.ori_every_block_height,(255,0,0,0),5)
self.osd_frame_tmp_img.draw_string_advanced(self.puzzle_width+25 + (i%self.level)*self.ori_every_block_width + 50,(self.display_size[1]-self.puzzle_ori_height)//2 + (i//self.level)*self.ori_every_block_height + 25,int(50*self.ratio_num),str(i),color=(255,0,0,255))
self.osd_frame_tmp[0:self.every_block_height,0:self.every_block_width,3] = 114
self.osd_frame_tmp[0:self.every_block_height,0:self.every_block_width,2] = 114
self.osd_frame_tmp[0:self.every_block_height,0:self.every_block_width,1] = 114
self.osd_frame_tmp[0:self.every_block_height,0:self.every_block_width,0] = 220
self.osd_frame_tmp[(self.display_size[1]-self.puzzle_ori_height)//2:(self.display_size[1]-self.puzzle_ori_height)//2+self.ori_every_block_width,self.puzzle_width+25:self.puzzle_width+25+self.ori_every_block_height,3] = 114
self.osd_frame_tmp[(self.display_size[1]-self.puzzle_ori_height)//2:(self.display_size[1]-self.puzzle_ori_height)//2+self.ori_every_block_width,self.puzzle_width+25:self.puzzle_width+25+self.ori_every_block_height,2] = 114
self.osd_frame_tmp[(self.display_size[1]-self.puzzle_ori_height)//2:(self.display_size[1]-self.puzzle_ori_height)//2+self.ori_every_block_width,self.puzzle_width+25:self.puzzle_width+25+self.ori_every_block_height,1] = 114
self.osd_frame_tmp[(self.display_size[1]-self.puzzle_ori_height)//2:(self.display_size[1]-self.puzzle_ori_height)//2+self.ori_every_block_width,self.puzzle_width+25:self.puzzle_width+25+self.ori_every_block_height,0] = 220
for i in range(self.level*10):
k230_random = int(random.random() * 100) % 4
blank_x_tmp = self.blank_x
blank_y_tmp = self.blank_y
if (k230_random < 2):
blank_x_tmp = self.blank_x + self.direction_vec[k230_random]
else:
blank_y_tmp = self.blank_y + self.direction_vec[k230_random]
if ((blank_x_tmp >= 0 and blank_x_tmp < self.level) and (blank_y_tmp >= 0 and blank_y_tmp < self.level) and (abs(self.blank_x - blank_x_tmp) <= 1 and abs(self.blank_y - blank_y_tmp) <= 1)):
move_rect = [blank_x_tmp*self.every_block_width,blank_y_tmp*self.every_block_height,self.every_block_width,self.every_block_height]
blank_rect = [self.blank_x*self.every_block_width,self.blank_y*self.every_block_height,self.every_block_width,self.every_block_height]
self.move_mat[:] = self.osd_frame_tmp[move_rect[1]:move_rect[1]+move_rect[3],move_rect[0]:move_rect[0]+move_rect[2],:]
self.osd_frame_tmp[move_rect[1]:move_rect[1]+move_rect[3],move_rect[0]:move_rect[0]+move_rect[2],:] = self.osd_frame_tmp[blank_rect[1]:blank_rect[1]+blank_rect[3],blank_rect[0]:blank_rect[0]+blank_rect[2],:]
self.osd_frame_tmp[blank_rect[1]:blank_rect[1]+blank_rect[3],blank_rect[0]:blank_rect[0]+blank_rect[2],:] = self.move_mat[:]
self.blank_x = blank_x_tmp
self.blank_y = blank_y_tmp
# run函数
def run(self,input_np):
# 先进行手掌检测
det_boxes=self.hand_det.run(input_np)
det_res=[]
two_point = np.zeros((4),dtype=np.int16)
# 对于每一个检测到的手掌做筛选
for det_box in det_boxes:
x1, y1, x2, y2 = det_box[2],det_box[3],det_box[4],det_box[5]
w,h= int(x2 - x1),int(y2 - y1)
if (h<(0.1*self.rgb888p_size[1])):
continue
if (w<(0.25*self.rgb888p_size[0]) and ((x1<(0.03*self.rgb888p_size[0])) or (x2>(0.97*self.rgb888p_size[0])))):
continue
if (w<(0.15*self.rgb888p_size[0]) and ((x1<(0.01*self.rgb888p_size[0])) or (x2>(0.99*self.rgb888p_size[0])))):
continue
det_res.append(det_box)
if len(det_res)!=0:
# 对第一个手掌做手掌关键点检测
det_box=det_res[0]
self.hand_kp.config_preprocess(det_box)
results_show=self.hand_kp.run(input_np)
two_point[0],two_point[1],two_point[2],two_point[3] = results_show[8],results_show[9],results_show[16+8],results_show[16+9]
return det_res,two_point
# 绘制效果,手指拇指和中指位置判断拼图移动位置,并与周边空白位置做交换
def draw_result(self,pl,det_res,two_point):
pl.osd_img.clear()
if len(det_res)==1:
if (two_point[1] <= self.rgb888p_size[0]):
self.distance_tow_points = np.sqrt(pow((two_point[0]-two_point[2]),2) + pow((two_point[1] - two_point[3]),2))* 1.0 / self.rgb888p_size[0] * self.display_size[0]
self.exact_division_x = int((two_point[0] * 1.0 / self.rgb888p_size[0] * self.display_size[0])//self.every_block_width)
self.exact_division_y = int((two_point[1] * 1.0 / self.rgb888p_size[1] * self.display_size[1])//self.every_block_height)
if (self.distance_tow_points < self.distance_thred and self.exact_division_x >= 0 and self.exact_division_x < self.level and self.exact_division_y >= 0 and self.exact_division_y < self.level):
if (abs(self.blank_x - self.exact_division_x) == 1 and abs(self.blank_y - self.exact_division_y) == 0):
move_rect = [self.exact_division_x*self.every_block_width,self.exact_division_y*self.every_block_height,self.every_block_width,self.every_block_height]
blank_rect = [self.blank_x*self.every_block_width,self.blank_y*self.every_block_height,self.every_block_width,self.every_block_height]
self.move_mat[:] = self.osd_frame_tmp[move_rect[1]:move_rect[1]+move_rect[3],move_rect[0]:move_rect[0]+move_rect[2],:]
self.osd_frame_tmp[move_rect[1]:move_rect[1]+move_rect[3],move_rect[0]:move_rect[0]+move_rect[2],:] = self.osd_frame_tmp[blank_rect[1]:blank_rect[1]+blank_rect[3],blank_rect[0]:blank_rect[0]+blank_rect[2],:]
self.osd_frame_tmp[blank_rect[1]:blank_rect[1]+blank_rect[3],blank_rect[0]:blank_rect[0]+blank_rect[2],:] = self.move_mat[:]
self.blank_x = self.exact_division_x
elif (abs(self.blank_y - self.exact_division_y) == 1 and abs(self.blank_x - self.exact_division_x) == 0):
move_rect = [self.exact_division_x*self.every_block_width,self.exact_division_y*self.every_block_height,self.every_block_width,self.every_block_height]
blank_rect = [self.blank_x*self.every_block_width,self.blank_y*self.every_block_height,self.every_block_width,self.every_block_height]
self.move_mat[:] = self.osd_frame_tmp[move_rect[1]:move_rect[1]+move_rect[3],move_rect[0]:move_rect[0]+move_rect[2],:]
self.osd_frame_tmp[move_rect[1]:move_rect[1]+move_rect[3],move_rect[0]:move_rect[0]+move_rect[2],:] = self.osd_frame_tmp[blank_rect[1]:blank_rect[1]+blank_rect[3],blank_rect[0]:blank_rect[0]+blank_rect[2],:]
self.osd_frame_tmp[blank_rect[1]:blank_rect[1]+blank_rect[3],blank_rect[0]:blank_rect[0]+blank_rect[2],:] = self.move_mat[:]
self.blank_y = self.exact_division_y
pl.osd_img.copy_from(self.osd_frame_tmp)
x1 = int(two_point[0] * 1.0 * self.display_size[0] // self.rgb888p_size[0])
y1 = int(two_point[1] * 1.0 * self.display_size[1] // self.rgb888p_size[1])
pl.osd_img.draw_circle(x1, y1, 1, color=(255, 0, 255, 255),thickness=4,fill=False)
else:
pl.osd_img.copy_from(self.osd_frame_tmp)
x1 = int(two_point[0] * 1.0 * self.display_size[0] // self.rgb888p_size[0])
y1 = int(two_point[1] * 1.0 * self.display_size[1] // self.rgb888p_size[1])
pl.osd_img.draw_circle(x1, y1, 1, color=(255, 255, 255, 0),thickness=4,fill=False)
else:
pl.osd_img.copy_from(self.osd_frame_tmp)
pl.osd_img.draw_string_advanced((self.display_size[0]//2),(self.display_size[1]//2),32,"请保证一只手入镜!",color=(255,0,0))
if __name__=="__main__":
# 显示模式,默认"hdmi",可以选择"hdmi"和"lcd"
display_mode="lcd"
# k230保持不变,k230d可调整为[640,360]
rgb888p_size = [1920, 1080]
if display_mode=="hdmi":
display_size=[1920,1080]
else:
display_size=[800,480]
# 手掌检测模型路径
hand_det_kmodel_path="/sdcard/examples/kmodel/hand_det.kmodel"
# 手掌关键点模型路径
hand_kp_kmodel_path="/sdcard/examples/kmodel/handkp_det.kmodel"
# 其他参数
anchors_path="/sdcard/examples/utils/prior_data_320.bin"
hand_det_input_size=[512,512]
hand_kp_input_size=[256,256]
confidence_threshold=0.2
nms_threshold=0.5
labels=["hand"]
anchors = [26,27, 53,52, 75,71, 80,99, 106,82, 99,134, 140,113, 161,172, 245,276]
# 初始化PipeLine,只关注传给AI的图像分辨率,显示的分辨率
pl=PipeLine(rgb888p_size=rgb888p_size,display_size=display_size,display_mode=display_mode)
pl.create()
pg=PuzzleGame(hand_det_kmodel_path,hand_kp_kmodel_path,det_input_size=hand_det_input_size,kp_input_size=hand_kp_input_size,labels=labels,anchors=anchors,confidence_threshold=confidence_threshold,nms_threshold=nms_threshold,nms_option=False,strides=[8,16,32],rgb888p_size=rgb888p_size,display_size=display_size)
try:
while True:
os.exitpoint()
with ScopedTiming("total",1):
img=pl.get_frame() # 获取当前帧
det_res,two_point=pg.run(img) # 推理当前帧
pg.draw_result(pl,det_res,two_point) # 绘制当前帧推理结果
pl.show_image() # 展示推理结果
gc.collect()
except Exception as e:
sys.print_exception(e)
finally:
pg.hand_det.deinit()
pg.hand_kp.deinit()
pl.destroy()
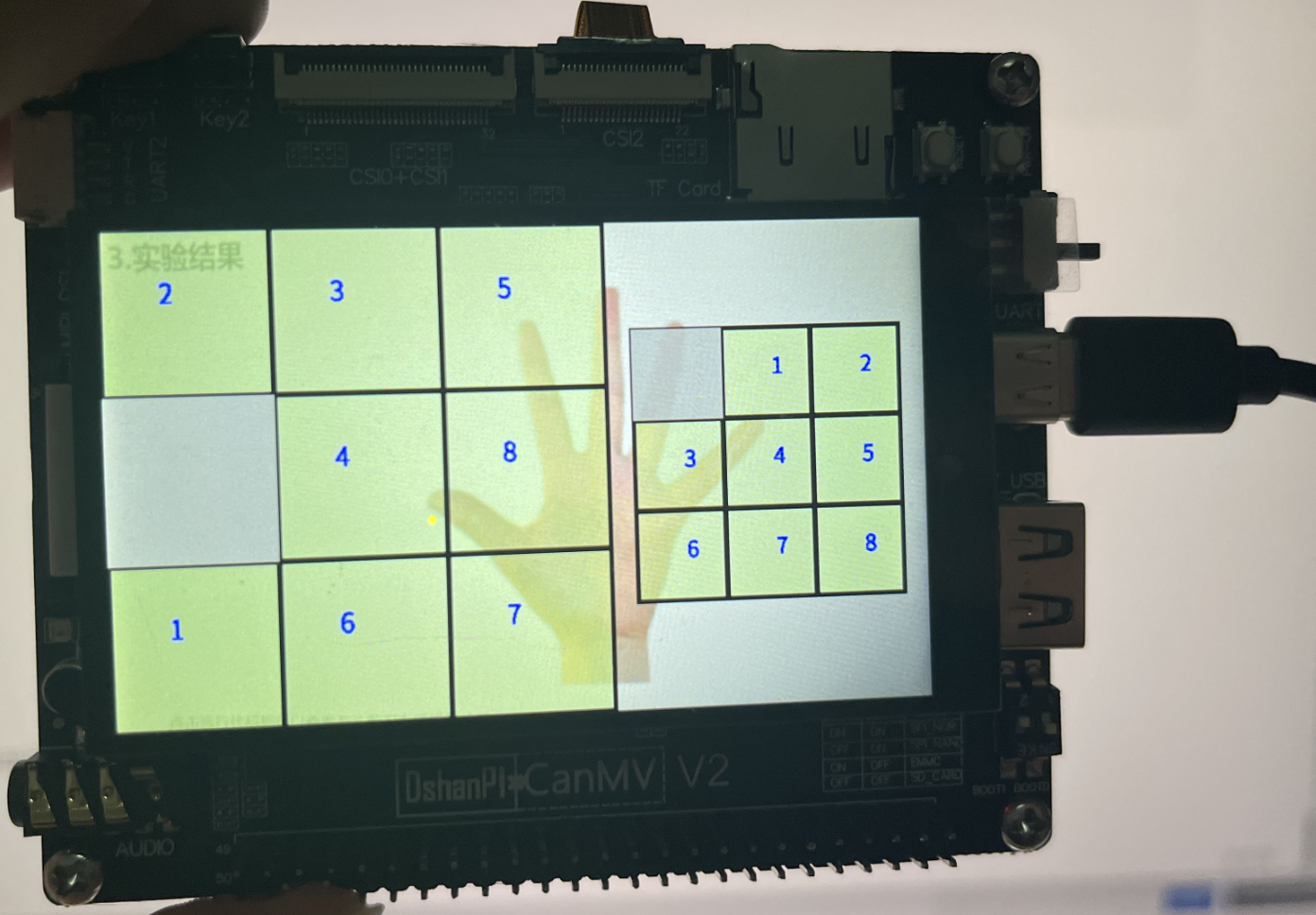
3.实验结果

点击运行代码后可以查看拼图游戏结果: