机器人巡线
1.实验目的
基于 CanMV 开发平台,构建一个使用摄像头识别“黑色轨迹线”的基础图像识别系统。通过灰度图像分割、图像区域加权、多 ROI 追踪策略,我们可以实时计算图像中黑线的位置,并输出角度信息,便于用于智能小车路径控制等应用。
2.实验原理
本实验利用摄像头实时采集画面,通过灰度阈值分割与多 ROI 加权相结合的方法,估计画面中黑色轨迹线相对于机器人正前方的偏移,并将其换算为偏转角度,作为小车方向控制的依据。整体处理流程为:灰度化 -> 阈值分割提取黑线连通域 -> 多 ROI 分区取最大连通域 -> 加权求中心 -> 计算偏转角度。
2.1 灰度化与阈值分割
摄像头以灰度模式输出 QVGA(320×240) 图像。黑色轨迹线在灰度图中像素值偏低,因此使用灰度阈值 GRAYSCALE_THRESHOLD = [(0, 64)] 进行分割:像素值落在 0~64 之间的区域被视为“黑线”,再通过 img.find_blobs() 提取这些区域的连通域(blob)。若要追踪白线,只需将阈值改为 [(128, 255)]。
2.2 多 ROI 分区检测
将图像沿垂直方向划分为 3 个水平条带(ROI):
- 底部 ROI(y=200):靠近机器人,最直接反映当前应跟随的线段;
- 中间 ROI(y=100):过渡区域;
- 顶部 ROI(y=0):远处线段,用于预判走向。
分区的好处在于:单一 ROI 只能给出线条在该区域的水平位置,而多个 ROI 配合可以体现线条的走向与弯曲趋势;同时即便某个区域因反光、断线等未能检出,其它区域仍可提供信息,提高整体鲁棒性。
2.3 加权中心计算
在每个 ROI 内,从检出的所有 blob 中选取面积最大的一个(max(blobs, key=lambda b: b.pixels()))作为该区域的轨迹线,取其中心横坐标 cx,再按各 ROI 权重加权平均:
权重设置为底部 0.7、中间 0.3、顶部 0.1,越靠近底部权重越大。原因是底部区域距离��机器人最近、成像最清晰、对当前转向决策最关键,应主导计算;顶部区域受透视畸变与噪声影响较大,仅作辅助。由此得到的 center_pos 即为整条线在画面中的“加权代表位置”。
2.4 偏转角度计算
得到线条中心 center_pos 后,用反正切函数将其相对画面中心的水平偏移换算为偏转角度:
随后通过 math.degrees() 将弧度转换为度数。
160是图像水平中点(320 / 2),center_pos - 160表示线条中心相对正前方的水平偏移量;120是图像垂直方向的一半(240 / 2),在此起类似“焦距”的作用,把像素级的水平偏移按比例映射为角度(可理解为:以画面纵深的半高为邻边、水平偏移为对边构成的直角三角形求夹角);- 负号用于将偏移方向转换为符合小车转向控制的符号约定。
当 center_pos = 160(线条在正前方)时偏移为 0,角度为 0°,表示直行;偏离越大,角度绝对值越大,表示需要更大幅度地转向。
2.5 结果输出
每帧计算出的偏转角度会通过串口打印并在画面左上角绘制显示,同时叠加各 ROI 的检测框与中心十字。该角度可作为 PID 等控制算法的误差输入,驱动小车电机差速转向,从而实现自动巡线。
3.代码解析
定义感兴趣区域
ROIS = [
(0, 200, 320, 40, 0.7), # 这部分是图像中的区域(ROI)
(0, 100, 320, 40, 0.3),
(0, 0, 320, 40, 0.1)
]
ROIS:定义了三个感兴趣区域(ROI)。每个区域由五个元素表示 (x, y, w, h, weight),分别为:
(x, y):ROI 区域的左上角坐标。(w, h):ROI 区域的宽度和高度。weight:每个区域的权重值,越靠近底部的区域给的权重越大,这意味着底部的图像对最终计算影响更大。
摄像头初始化
sensor = Sensor(width=1280, height=960)
sensor.set_framesize(width=DETECT_WIDTH, height=DETECT_HEIGHT)
sensor.set_pixformat(Sensor.GRAYSCALE) # 设置为灰度图模式
sensor = Sensor(width=1280, height=960):创建一个摄像头对象,并设置其分辨率为 1280x960 像素。
sensor.reset():初始化摄像头。
sensor.set_framesize(width=DETECT_WIDTH, height=DETECT_HEIGHT):设置摄像头输出的图像分辨率为 320x240。
sensor.set_pixformat(Sensor.GRAYSCALE):设置图像的像素格式为灰度图。
初始化显示屏
Display.init(Display.ST7701, to_ide=True) # 初始化 LCD 显示屏,并设置为 800x480
Display.init(Display.ST7701, to_ide=True):初始化显示屏,并将其设置为 ST7701 类型显示屏,分辨率为 800x480。
初始化媒体资源管理器
MediaManager.init() # 初始化媒体管理器,管理资源
sensor.run() # 启动摄像头,开始采集图像
MediaManager.init():初始化媒体资源管理器,准备好管理图像等资源。
sensor.run():启动摄像头采集图像,开始实时捕获。
检测连同区域
for r in ROIS:
blobs = img.find_blobs(GRAYSCALE_THRESHOLD, roi=r[0:4], merge=True) # r[0:4] 是上面定义的roi元组.
for r in ROIS::遍历所有 ROI 区域。
blobs = img.find_blobs(GRAYSCALE_THRESHOLD, roi=r[0:4], merge=True):在每个 ROI 区域内,检测符合灰度阈值的 blob(连通区域)。如果找到了符合条件的区域,它们会被存储在 blobs 列表中。
if blobs:
largest_blob = max(blobs, key=lambda b: b.pixels()) # 找到面积最大的 blob
img.draw_rectangle(largest_blob.rect()) # 在图像上绘制矩形框
img.draw_cross(largest_blob.cx(), largest_blob.cy()) # 在图像上绘制十字线(中心点)
centroid_sum += largest_blob.cx() * r[4] # 累加加权中心位置
if blobs::如果找到了符合条件的 blob。
largest_blob = max(blobs, key=lambda b: b.pixels()):找到最大面积的 blob。
img.draw_rectangle(largest_blob.rect()):绘制出最大 blob 的矩形框。
img.draw_cross(largest_blob.cx(), largest_blob.cy()):绘制出最大 blob 的中心点。
centroid_sum += largest_blob.cx() \* r[4]:将最大的 blob 的 X 坐标乘以该 ROI 区域的权重并累加,用于后续计算。
计算线条中心位置
center_pos = (centroid_sum / weight_sum) # 计算加权中心位置
计算所有 ROI 区域加权后的线条中心位置。
计算线条的偏转角度
deflection_angle = -math.atan((center_pos - 160) / 120)
deflection_angle = -math.atan((center_pos - 160) / 120):计算线条中心的偏离角度。通过反正切函数计算偏差,并通过 (center_pos - 160) 计算与中心位置的偏离。
160是图像的中点。120是��半个图像高度,用于计算角度。
弧度转度数
deflection_angle = math.degrees(deflection_angle) # 转换成角度
将偏转角度从弧度转换为度数。
绘制角度信息
img.draw_string_advanced(2, 2, 20, str('%.1f' % deflection_angle), color=(255, 255, 255)) # 绘制偏转角度文字
在图像的左上角绘制偏转角度信息,白色字体。
图像显示
Display.show_image(img, x=round((800 - DETECT_WIDTH) / 2), y=round((480 - DETECT_HEIGHT) / 2)) # 居中显示图像
将图像显示在 LCD 屏幕上,并将其居中显示。
4.示例代码
'''
本程序遵循GPL V3协议, 请遵循协议
实验平台: DshanPI CanMV
开发板文档站点 : https://eai.100ask.net/
百问网学习平台 : https://www.100ask.net
百问网官方B站 : https://space.bilibili.com/275908810
百问网官方淘宝 : https://100ask.taobao.com
'''
import time, os, gc, sys, math
from media.sensor import *
from media.display import *
from media.media import *
# 图像分辨率为 QVGA 320x240
DETECT_WIDTH = 320
DETECT_HEIGHT = 240
# 追踪黑线 (灰度阈值为0~64),追踪白线时改为 [(128, 255)]
GRAYSCALE_THRESHOLD = [(0, 64)]
# 设置 ROI 区域,从图像底部到顶部分成3块区域,每块区域有对应权重
ROIS = [
(0, 200, 320, 40, 0.7), # 底部 ROI,靠近机器人,权重最大
(0, 100, 320, 40, 0.3), # 中间 ROI,次之
(0, 0, 320, 40, 0.1) # 顶部 ROI,权重最小
]
# 计算所有 ROI 的总权重
weight_sum = sum(r[4] for r in ROIS)
sensor = None
try:
# 初始化摄像头
sensor = Sensor(width=1280, height=960)
sensor.reset()
sensor.set_framesize(width=DETECT_WIDTH, height=DETECT_HEIGHT)
sensor.set_pixformat(Sensor.GRAYSCALE)
# 初始化显示屏 (使用 3.5 寸 LCD 并启用 IDE 缓冲)
Display.init(Display.ST7701, to_ide=True)
# 初始化媒体管理器
MediaManager.init()
sensor.run()
clock = time.clock()
while True:
clock.tick()
os.exitpoint() # 检查是否应退出程序
img = sensor.snapshot()
centroid_sum = 0
for r in ROIS:
blobs = img.find_blobs(GRAYSCALE_THRESHOLD, roi=r[0:4], merge=True)
if blobs:
largest_blob = max(blobs, key=lambda b: b.pixels())
# 绘制 ROI 边框和十字中心
img.draw_rectangle(largest_blob.rect())
img.draw_cross(largest_blob.cx(), largest_blob.cy())
# 按权重累加中心点 X 坐标
centroid_sum += largest_blob.cx() * r[4]
# 计算加权平均的中心位置
center_pos = centroid_sum / weight_sum
# 偏移角度计算(图像宽度 320,中心在160,采用三角函数偏移量)
deflection_angle = -math.atan((center_pos - 160) / 120)
deflection_angle = math.degrees(deflection_angle)
# 打印偏移角度
print("Turn Angle: %f" % deflection_angle)
# 在图像上绘制偏转角度文字
img.draw_string_advanced(2, 2, 20, str('%.1f' % deflection_angle), color=(255, 255, 255))
# 居中方式显示图像(让图像在800x480 LCD 上居中)
Display.show_image(img, x=round((800 - DETECT_WIDTH) / 2), y=round((480 - DETECT_HEIGHT) / 2))
print(clock.fps()) # 打印帧率
gc.collect()
except KeyboardInterrupt:
print("用户终止程序")
except BaseException as e:
print(f"异常:{e}")
finally:
if isinstance(sensor, Sensor):
sensor.stop()
Display.deinit()
os.exitpoint(os.EXITPOINT_ENABLE_SLEEP)
time.sleep_ms(100)
MediaManager.deinit()
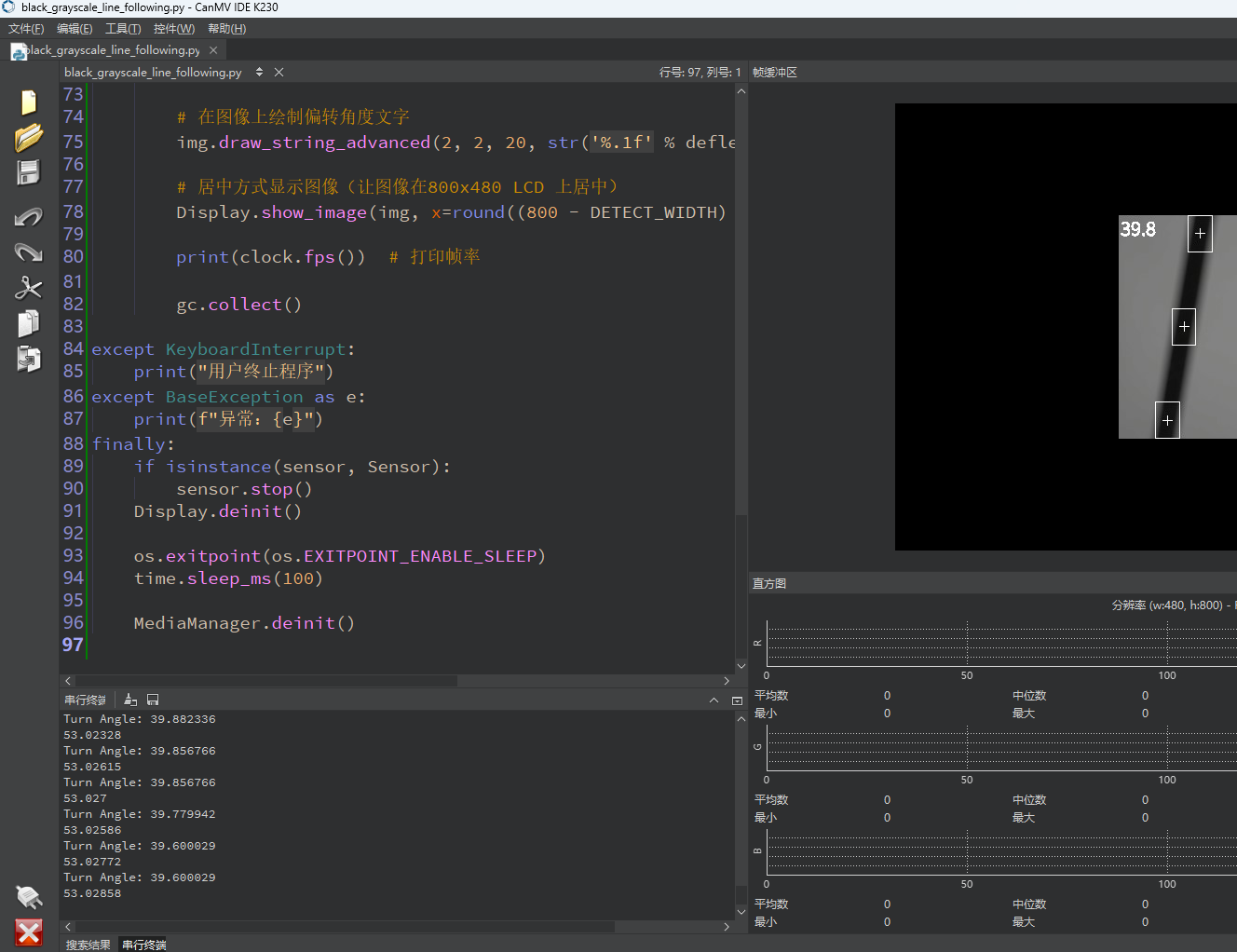
5.实现结果
点击运行后,可以屏幕上看到检测直线的角度。