矩形检测
1.实验目的
实现K230对图像中的矩形进行检测。
2.实验原理
2.1 原理解析
矩形检测在图像处理任务中具有重要作用,常用于条码或二维码的预定位步骤。通过先快速检测图像中的矩形区域,可以缩小后续解码的搜索范�围,从而显著提升整体处理速度。
此外,矩形检测也是 OCR(光学字符识别)流程中的关键预处理手段之一,可用于定位文档中的文字块或段落区域,辅助后续文字识别。
CanMV 固件中的 find_rects() 函数基于类似于 AprilTag 四边形检测算法的实现,具备较强的鲁棒性。它不仅能够应对常规矩形,还能适应一定程度的平移、旋转甚至仿射变形(例如图像扭曲或倾斜),在实际应用中具有较高的准确性与稳定性。
2.2 API
find_rects 函数用于检测图像中的矩形区域。这个函数可以用于找到图像中的方形或矩形物体。
- 语法
rects = img.find_rects(threshold=2000, margin=10)
-
参数解释
- threshold: 矩形的最小面积��。默认值是
2000。 - margin: 矩形检测的边距容忍度。默认值是
10。
- threshold: 矩形的最小面积��。默认值是
-
返回值
返回一个包含矩形信息的列表。每个矩形是一个
Rect对象,包含矩形的坐标和大小。
3.代码解析
捕获一帧图像
img = sensor.snapshot()
查找矩形
for r in img.find_rects(threshold=10000):
查找图像中的矩形区域:
threshold=10000用于过滤掉弱边缘、小矩形;- 较高的阈值意味着只保留对比度高、面积大的矩形。
绘制矩形
img.draw_rectangle([v for v in r.rect()], color=(255, 0, 0))
绘制红色矩形边框(外接矩形)。
绘制圆点
for p in r.corners():
img.draw_circle(p[0], p[1], 5, color=(0, 255, 0))
绘制绿色圆点,表示矩形的四个角点。
图像显示屏幕
Display.show_image(img, x=round((800-sensor.width())/2), y=round((480-sensor.height())/2))
4.示例代码
'''
本程序遵循GPL V3协议, 请遵循协�议
实验平台: DshanPI CanMV
开发板文档站点 : https://eai.100ask.net/
百问网学习平台 : https://www.100ask.net
百问网官方B站 : https://space.bilibili.com/275908810
百问网官方淘宝 : https://100ask.taobao.com
'''
import time, os, gc, sys
from media.sensor import * # 导入摄像头相关接口
from media.display import * # 导入图像显示相关接口
from media.media import * # 导入媒体资源管理相关接口
# 设置检测图像的宽度(16字节对齐)和高度
DETECT_WIDTH = ALIGN_UP(320, 16)
DETECT_HEIGHT = 240
sensor = None # 定义全局摄像头对象变量
# 摄像头初始化函数
def camera_init():
global sensor
# 创建摄像头对象,设置图像采集尺寸
sensor = Sensor(width=DETECT_WIDTH, height=DETECT_HEIGHT)
# 复位摄像头(清空旧配置)
sensor.reset()
# 可以设置图像镜像或翻转,默认注释掉(根据需要打开)
# sensor.set_hmirror(False)
# sensor.set_vflip(False)
# 设置摄像头输出图像尺寸和格式(RGB565)
sensor.set_framesize(width=DETECT_WIDTH, height=DETECT_HEIGHT)
sensor.set_pixformat(Sensor.RGB565)
# 初始化虚拟显示器(IDE窗口可视),设置分辨率和帧率
Display.init(Display.ST7701, fps=100, to_ide=True)
# 初始化媒体管理器,分配 sensor 资源
MediaManager.init()
# 启动摄像头采集图像
sensor.run()
# 摄像头资源释放函数
def camera_deinit():
global sensor
# 停止摄像头
sensor.stop()
# 释放显示设备资源
Display.deinit()
# 允许系统进入休眠点
os.exitpoint(os.EXITPOINT_ENABLE_SLEEP)
# 等待硬件处理完成
time.sleep_ms(100)
# 释放媒体资源
MediaManager.deinit()
# 图像采集并进行矩形检测
def capture_picture():
fps = time.clock() # 创建帧率计时器
while True:
fps.tick() # 开始新一帧的计时
try:
os.exitpoint() # 检查是否收到中断或系统退出请求
global sensor
img = sensor.snapshot() # 拍摄一张图像帧
# threshold 值用于过滤边缘模糊、对比度低的小矩形;
# 阈值越大,只会保留边缘对比更强、面积更大的矩形
for r in img.find_rects(threshold=10000):
# 绘制红色矩形框(四个顶点的外接矩形)
img.draw_rectangle([v for v in r.rect()], color=(255, 0, 0))
# 绘制绿色圆圈标出四个角点位置
for p in r.corners():
img.draw_circle(p[0], p[1], 5, color=(0, 255, 0))
# 打印矩形的参数信息(中心点、大小、角度等)
print(r)
# 在显示屏或 IDE 中显示图像
Display.show_image(img, x=round((800-sensor.width())/2),y=round((480-sensor.height())/2))
img = None # 释放图像内存
gc.collect() # 手动触发垃圾回收,释放内存
print(fps.fps()) # 打印当前帧率
except KeyboardInterrupt as e:
# 用户主动终止程序
print("用户中止程序:", e)
break
except BaseException as e:
# 捕获其他异常
print(f"发生异常:{e}")
break
# 主函数
def main():
os.exitpoint(os.EXITPOINT_ENABLE) # 启用系统退出检测点
camera_is_init = False
try:
print("开始初始化摄像头")
camera_init() # 初始化摄像头和显示设备
camera_is_init = True
print("开始图像采集")
capture_picture() # 进入主图像检测循环
except Exception as e:
# 初始化或运行过程中发生异常
print(f"异常:{e}")
finally:
# 程序退出前释放资源
if camera_is_init:
print("释放摄像头资源")
camera_deinit()
# 如果当前文件作为主程序运行,执行 main 函数
if __name__ == "__main__":
main()
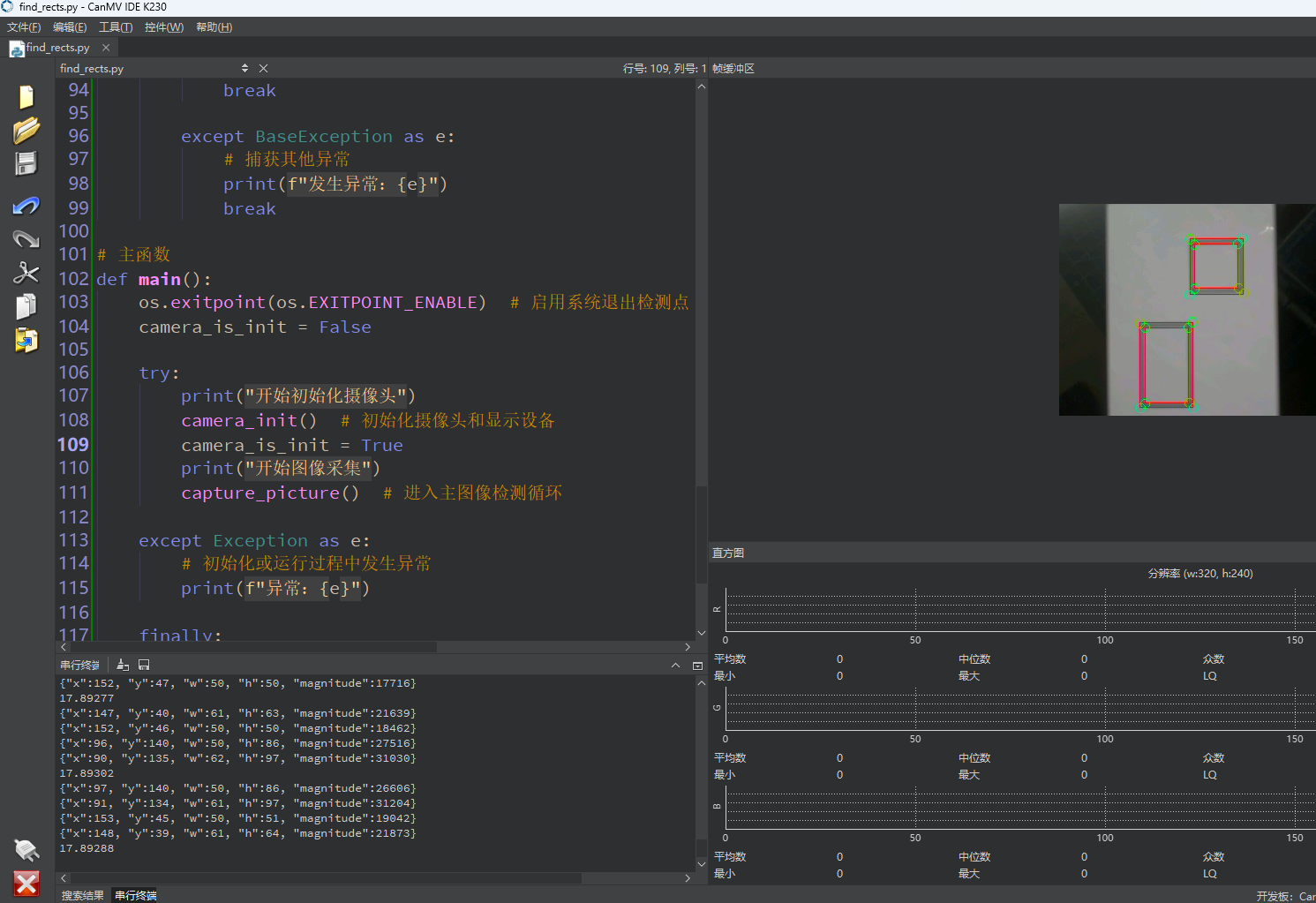
5.实验结果

点击运行后可以在显示屏显示检测到的矩形