上电自动运行代码
1.MicroPython 启动机制
MicroPython 固件在开发板上电启动时,会按照以下顺序查找并执行脚本文件:
boot.py(可选):- 是系统上电后 最先执行 的脚本。
- 通常用于执行一些初始化设置,例如串口波特率、Wi-Fi 配置、系统时钟设置等。
- 如果在
boot.py中使用了while True:阻塞代码,会导致后续的main.py无法执行。
main.py(推荐使用):- 是
boot.py执行完毕后自动运行的脚本。 - 用于编写实际业务逻辑,例如图像识别、音频处理、传感器控制等功能。
- 大多数应用只需要将主程序保存为
main.py即可。
- 是
2.保存代码为main.py
请注意:使用IDE保存代码后,请关闭IDE工具,如果开启IDE工具,程序不会上电自动运行!!!
如果需要取消开机自启程序,请在sdcard目录下删除对应的
main.py文件
2.1 使用IDE保存
在 CanMV K230 IDE 中完成代码开发后,只需按以下步骤操作:
1.确保 IDE 已成功连接开发板。
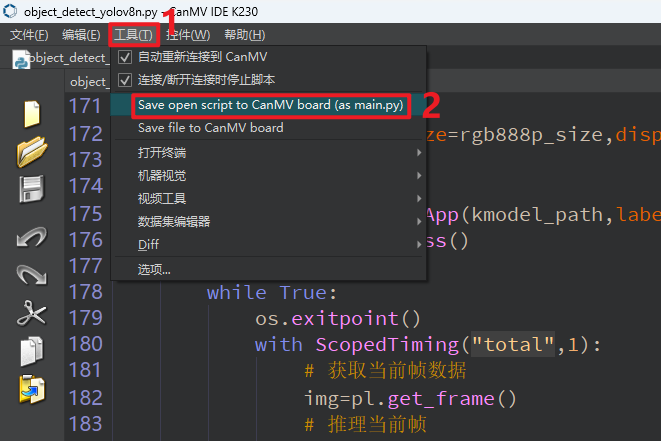
2.点击 工具 → Save open scipt to CanMV board(as main.py),将当前脚本保存为 main.py。
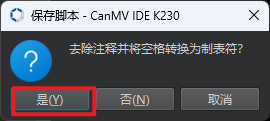
3.弹出保存脚本时,点击是后等待保存完成。
保存完成后可以在sdcard目录下看到main.py。
4.重启开发板(或断电重上电),开发板将自动运行 main.py 中的代码。
2.2 手动保存
当 CanMV K230 开发板 通过 USB 连接到电脑时,会被识别为一个 U盘设备。我们可以像操作普通U盘一样,直接向其中复制文件。
要让开发板 上电后自动运行你的程序,只需执行以下操作:
- 将你的 Python 脚本重命名为
main.py。 MicroPython 会在上电时自动查找并执行该文件。 - 将
main.py复制到开发板的 SD 卡根目录。 打开被识别出的U盘设备(通常名为SDCARD或类似),将main.py拖入该目录下即可。